双源车载差分卫星导航定位稳定性分析
2014-01-10 01:47陈向东
导航定位学报 2014年3期
陈向东,刘 威
(61175部队,南京 210049)
1 引言
卫星导航技术应用于车载导航已经非常普遍,目前一般是采用伪距单点定位与地图匹配的导航模式。随着生产实践的发展,人们对车载导航的精度要求越来越高,如果车载导航的精度达到2m以内,就能进行车道级导航,可以应用于精细农业,提高农业机械化耕作的精细程度。
然而,由于道路环境复杂,城市高楼林立,车载导航系统不稳定,有时会出现导航错误,给导航用户带来麻烦。为了降低成本,一般车载导航设备都是采用单频接收机,探测与修复周跳较难。很多实际应用表明现有的卫星车载导航系统并不稳定,精度落后于导航用户的需要。
随着美国全球定位系统(global positioning system,GPS)、俄罗斯格洛纳斯系统(global navigation satellite system,GLONASS)、中国北斗卫星导航系统(BeiDou navigation satellite system,BDS)和欧盟伽利略卫星导航系统(Galileo navigation satellite system,Galileo)等的发展,多卫星导航定位系统联合导航使卫星导航定位技术的应用更加广泛,同时也促进了车载导航技术的发展。
利用城市建成的连续运行参考站(continuously operating reference station,CORS)网络,汽车只要使用廉价的单频车载导航仪就能进行伪距差分导航。汽车用户实时接收CORS网络发送的CORS数据流和坐标信息,与自身接收到的单频伪距相位观测值进行差分处理,就能获得实时2m的导航精度。车载导航软件可以进行BDS GPS、BDS/GPS联合等三种模式的车载差分导航,在理想环境下能进行车道级导航。
利用BDS/GPS联合导航定位能增加车载导航的稳定性。城市环境高楼林立,卫星信号受到严重遮挡,因此,天上的导航卫星越多越好,汽车用户可以根据导航定位情况自动选择北斗系统或者GPS导航,或者进行联合导航,将导航盲区降低到最少。
2 车载差分卫星导航的基本原理
车载差分卫星导航分三步:第一步,汽车用户实时接收CORS站的数据流;第二步,组成双差观测值;第三步,用双差相位观测值与双差伪距观测值进行实时相位平滑伪距,得到单频三差平滑观测值,计算汽车坐标,从而进行实时差分导航定位。
车载差分卫星导航中组成双差观测值时消除了卫星钟钟差和接收机钟差,削弱了电离层和对流层延迟,同时已知基准站的精确坐标,从而能大幅度提高车载导航定位的精度。
假设观测时刻为t,基准站用下标B表示,汽车用下标A表示,卫星S分别以上标p,q表示,因为是单频,所以将伪距和相位的观测值记为P和L。
2.1 组成伪距和相位的双差观测值
汽车A和基准站B同时观测到卫星p和q,设卫星q为参考卫星,则伪距和载波相位的双差观测方程为[1]
由于在短基线(15km以内),电离层、对流层延迟具有较强的空间相关性,所以这里认为双差消除了电离层和对流层的影响,同时忽略多路径和观测噪声的影响。
2.2 组成单频三差平滑观测值
由前面可知伪距和相位的双差观测值为

故单频三差平滑观测值及其Hatch滤波形式为[5]

式(4)中,i、j都是指观测历元时刻。
2.3 粗差和周跳的探测与修复
CORS网络的基准站在发送观测数据前须进行周跳的探测和修复,由于基准站有双频数据,因此一般是利用Melbourne-Wübbena线性组合进行周跳的探测,利用电离层残差LG组合,进行周跳的修复,利用伪距和载波的无电离层Iono-Free组合进一步剔除粗差[6-7],这方面的文献较多,不再赘述。
车载用户接收的是单频相位和伪距,无法采用双频组合方法探测与修复周跳,但是相位双差观测值历元间的二次差变化非常稳定,可以采用高次差法探测由于车载用户周跳产生的相位双差周跳,相邻历元的二次差计算公式为

单频三差码相组合在这里简记为LP3组合,单频三差码相组合相邻历元二次差记为LP3_2D,则其表达式为
式(5)、式(6)及式(7)三式中,i均表示历元,由于双差过程削弱了电离层延迟和对流层延迟,因此单频三差码相组合二次差在历元间的变化很小。
对基准站数据进行预处理得到无周跳与粗差的基准站数据,在比基础上采用高次差法对双差相位观测值进行周跳的探测,采用单频三差码相组合相邻历元二次差进一步剔除周跳和粗差,就可以得到精度较高的单频三差平滑观测值。
3 导航稳定性分析
下面以2012-10-31—11-15在北京的车载导航数据进行实验分析,BDS和GPS同时导航的时段长度约22min 数据采样率为1s 导航的效果采用将根据实时计算的坐标将汽车位置绘到Google地图上显示的方法,实地对比图上显示的地图与所在道路环境情况是否一致。
3.1 周跳或粗差的剔除阈值设置
根据2012-10-31T13:40:32—16:31:52这个时段的数据处理,进行周跳的探测,以G10、G17、C1、C9号卫星为例进行周跳探测情况如下。
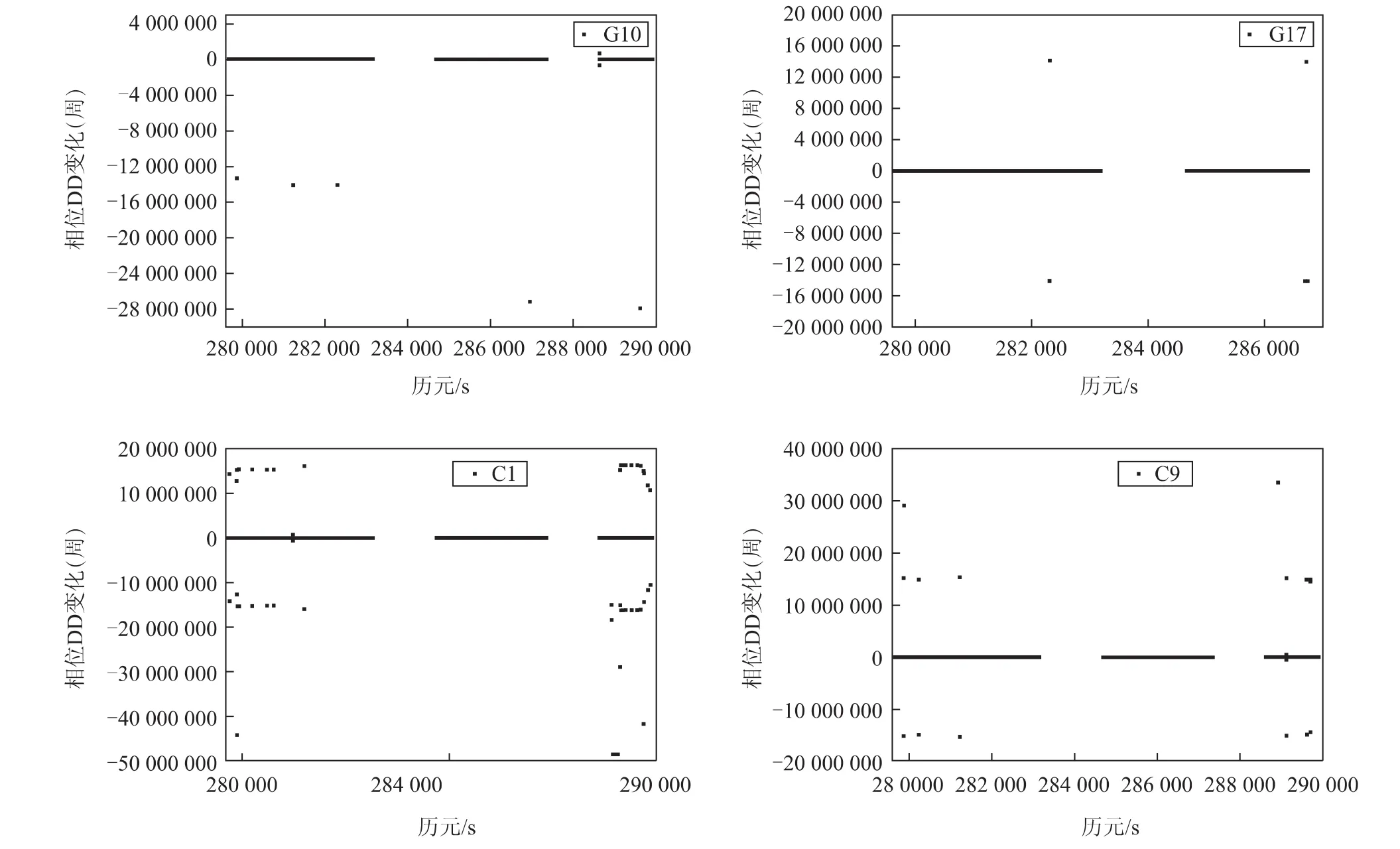
图1 BDS和GPS车载导航数据周跳的探测
由计算结果和图1知,在没有周跳的情况下,相邻历元载波相位的二次差的值一般都在±1周以内,其时间序列Δ为一条平稳变化的曲线,基本接近直线。因此,ΔφDD(i)的值超过1周时,可以认为基准站或者流动站的数据发生了周跳;考虑到车载导航精度达到Δ2m即可,同时双差增大了观测Δ噪声,因此对ΔφDD(i)的阈值设置为2周。当ΔφDD(i)值超过两周时,平滑重新初始化,其周跳探测效果基本满足车载米级差分导航相位平滑伪距的精度要求。
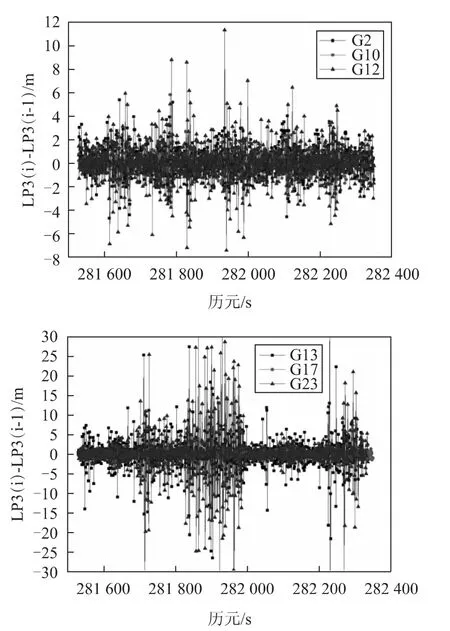
图2 GPS导航LP3_2D历元值图
选取BDS和GPS差分导航稳定性较好的时段T 14:12:10—14:25:50这821个历元的数据,并从数据中剔除了个别粗差,LP3组合的变化情况如图2所示,其中G4为双差基准星,其余共同的可见且观测值稳定的卫星为G2、G10、G12、G13、G17、G23。北斗系统卫星中C12为双差基准星,其余共同的可见卫星为C1、C3、C9,其LP3_2D组合的变化情况如图3和表1所示。
表1是每个北斗系统和GPS卫星LP3组合相邻历元间差值的标准差(STD)和高度角关系表。
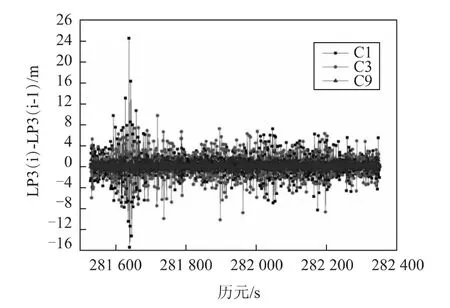
图3 北斗系统导航LP3_2D历元值图
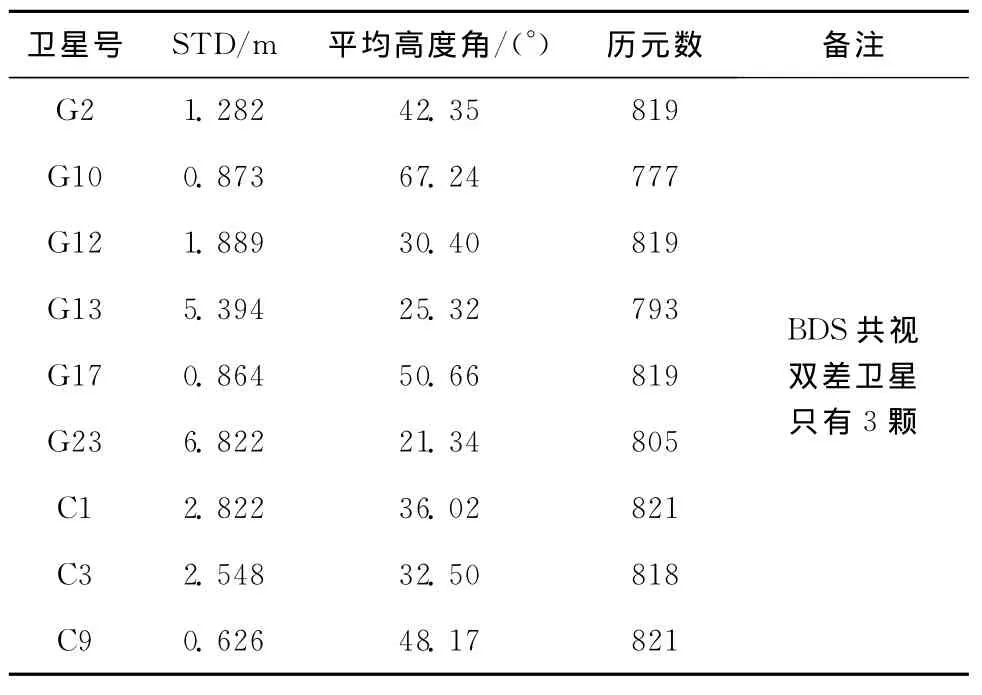
表1 北斗系统和GPS导航LP3_2D历元值与高度角关系表
从表1、图2、图3可以看出,GPS的LP3_2D的标准方差STD随卫星高度角增加而递减,在50°以上卫星的LP3_2D的标准方差STD小于1.0m。BDS的LP3_2D的STD值也随卫星高度角增加而递减,高度角为48°的C9卫星的LP3_2D的STD值只有0.626m。说明BDS和GPS卫星的LP3_2D历元值基本随着高度角的增加而递减,就是说卫星越高,LP3_2D在历元间的变化越小,观测值越准确。根据表1可以近似拟合出卫星LP3组合历元差值的STD与高度角的关系。
对GPS卫星和BDS卫星分别有

或者

由于北斗系统卫星较少,因此只能做直线拟合,式(8)、式(9)和式(10)式中STDG、STDC单位为 m,HG、HC单位为(°)。从式(9)和式(10)式可以看出BDS和GPS的LP3_2D值随高度角的变化趋势相似。当卫星相邻历元的LP3_2D值超过3倍的STDGSTDC时,可以认为出现了周跳或粗差,平滑重新初始化。
3.2 单频三差平滑的分段与重新初始化
实验表明,在汽车行驶轨迹出现大的偏差时,某颗卫星的LP3_2D或二次差LDD(i)出现了粗差。
在组成每颗BDS或GPS卫星的单频三差平滑观测值时,用高次差法探测到相位双差观测值LpAqB的周跳后即对该双差观测值重新开始平滑,同时以STDG、STDC为限值,当卫星的LP3_2D值超过2倍的STDG、STDC时,立即舍弃前面平滑的平均模糊度对该双差观测值重新开始平滑,那么就可以有效的去除实时导航中出现的伪距的粗差和相位的周跳。在实验数据中,LP3_2D值超限的情况多发生在通过高架桥,高楼旁边时。在通过公路高架桥时,相位信号会失锁,此时采用LP3_2D控制单频三差平滑效果明显。
3.3 车载北斗系统和GPS联合差分导航
分析了2012-10-31和2012-11-05这2d的数据中,进行差分定位的情况如下图和表所示。
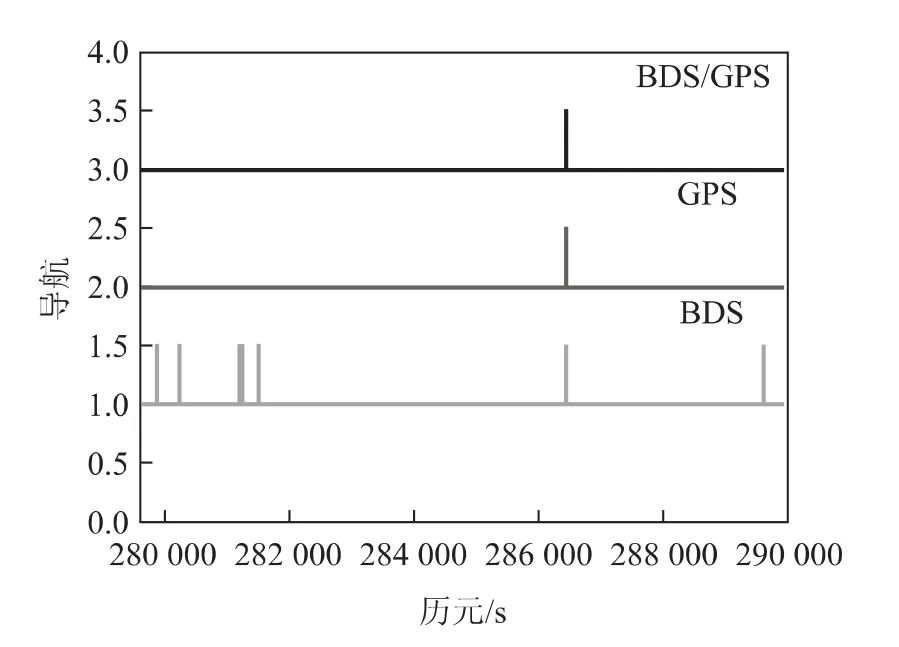
图4 2012-12-31车载导航效果
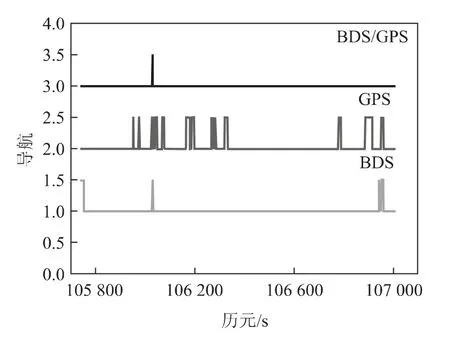
图5 2012-11-05车载导航效果
图4和图5中,“导航”值为1.0、2.0或者3.0表示BDS、GPS或者BDS/GPS联合导航在差分定位中共视卫星数大于4颗,可以进行差分导航,值为1.5、2.5或者3.5则表示BDS、GPS或者BDS/GPS联合导航不能进行差分导航。从图中看出,图4中2012-10-31的导航数据中GPS明显比BDS稳定,只有两个地方出现了导航中断的情况;图5中2012-11-05的导航中GPS卫星中间断续出现了很多中断情况,导航不稳定。北斗卫星开始和结束的地方出现中断,中间中断一次,开始历元无法导航是因为紧靠高大建筑物,无法观测到北斗卫星,而GPS卫星分布均匀,可以导航;北斗系统导航中间历元较为连续,是因为北斗系统目前覆盖亚太地区,卫星较多,所以在某些地区某种条件下的稳定性优于GPS。
以上两天的导航效果图和表2显示,BDS/GPS联合导航比单BDS或者单GPS系统导航的可用性提高0%~10%不等,在市区道路行驶,BDS/GPS联合导航的可用性一般达到99%以上(隧道、高架桥的遮挡,强电磁信号源干扰的情况将无法导航)。
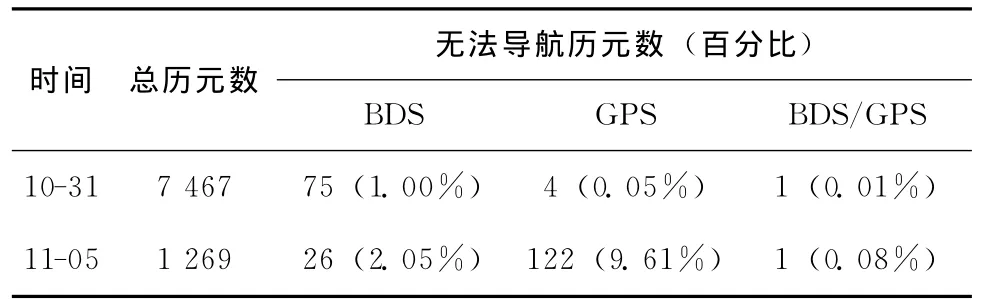
表2 单系统导航与联合导航可用性分析表
4 结论与展望
根据卫星高度角近似计算出该卫星LP3组合的STD值,以该值为限制条件,当单频三差码相组合LP3观测值的相邻历元互差超过STD值时,就结束前一平滑时段,重新开始三频三差平滑,可以滤去一部分粗差和周跳,提高BDS和GPS的差分导航稳定性。
单一的卫星导航系统难以覆盖整个导航区域,如果同时运用BDS和GPS进行车载差分导航,根据BDS和GPS导航的质量实时进行BDS和GPS导航系统切换,或者进行联合导航,就基本可以保证任何时刻都能进行车载差分导航,提高车载导航的稳定性。
可以预测,当车载差分导航精度达到2m以内,且以稳定的导航精度覆盖导航全区域时,结合惯性导航,地形匹配导航,雷达成像技术,就可能实现车辆的无人驾驶,在交通、军事方面有广阔的应用前景。
[1] 唐卫明.大范围长距离GNSS网络RTK技术研究及软件实现[D].武汉:武汉大学,2006.
[2] 邹璇.基于大规模区域地基增强网的GNSS非差网络RTK技术研究及软件实现[D].武汉:武汉大学,2012.
[3] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005.
[4] 刘晖.GPS单点定位程序流程[R].武汉:武汉大学卫星导航技术研究中心,2010.
[5] 刘长健.电离层建模方法与质量控制研究[D].郑州:解放军信息工程大学,2011.
[6] 黄德武,熊永良.周跳的探测与修复[J].全球定位系统,2005,30(4):32-35.
[7] 李征航,吴秀娟.全球定位系统(GPS)技术的最新进展(第四讲:精密单点定位)[J].测绘信息与工程,2002,27(6):31-35.
[8] 刘基余.GPS卫星导航定位原理和方法[M],北京:科学出版社,2003.
[9] ISSHIKI H.An Approach to Ambiguity Resolution in Multi Frequency Kinematic Positioning[C]//Proceedings of the 2003International Symposium on GPS/GNSS.Florida:[s.n.],2003:545-552.
[10] KIM D,LANGLEY R B.Instantaneous Realtime Cycle-slip Correction of Dual-frequency GPS Data[C]//Proceedings of the International Symposium on Kinematic Systems in Geodesy,Geomatics and Navigation.Banff:[s.n.],2001:255-264.
猜你喜欢
地理空间信息(2022年10期)2022-10-31
北京大学学报(自然科学版)(2022年4期)2022-08-18
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
导航定位学报(2020年6期)2021-01-05
火力与指挥控制(2020年1期)2020-03-27
全球定位系统(2019年4期)2019-08-30
全球定位系统(2018年5期)2018-11-20
空天防御(2018年1期)2018-04-16
全球定位系统(2017年6期)2017-02-05