并网型电励磁同步电机风力发电控制策略研究
2013-12-28 06:14:42龙世鹏周扬忠
电源学报 2013年5期
龙世鹏,周扬忠
(福州大学电气工程与自动化学院,福建 福州350108)
引言
随着能源枯竭和环境污染等问题的出现,变速恒频风力发电技术成为当今的研究热点。目前主流风力发电机组有鼠笼式异步发电机 (SCIG)风电系统、双馈感应发电机(DFIG)风电系统和同步发电机(SG)风电系统[1]。SCIG风电系统具有效率低、功率因数难控制等缺点,在小容量场合应用较多;DFIG风电系统具有控制复杂、故障率高、低电压穿越能力有限等缺点,在大功率高转速场合维修量大大增加。永磁同步发电机(PMSG)风电系统存在功率因数特性差、永磁体有失磁危险等缺点,而电励磁同步发电机(EESG)风电系统拥有功率因数可调、过载能力强、转动惯量小、弱磁区转矩特性好以及无失磁风险等优点,研究其在风力发电中的应用具有重要意义。根据不同的发电机和拓扑电路有不同的控制策略,机侧主要有矢量控制 (VC)、直接功率控制(DPC)和直接转矩控制(DTC),网侧主要有矢量控制和直接功率控制。20世纪80年代由德国学者M.Depenbrock和日本学者I.Takahashi首先针对异步电动机提出DTC,90年代学者们提出同步电动机直接转矩控制理论[2~5],由于DTC直接控制转矩,控制结构简单,动态响应快,若将其应用于发电领域,可以有效提高发电性能,减小发电控制策略对电机参数的依赖程度。文献[6]以EESG为对象采用气隙磁场定向矢量控制研究其在风力发电中的应用;文献[7]针对PMSG风电系统介绍了机侧矢量控制和网侧DPC策略;文献[8]以PMSG为对象详细研究了机侧最大功率跟踪(MPPT)与DTC相结合的控制策略和网侧DPC的控制策略。
本文致力于电励磁同步发电机变速恒频风力发电控制策略(机侧、网侧)研究,系统功率部分拓扑为背靠背双PWM结构。
1 系统控制策略研究
本文设计的整个风力发电系统结构框图如图1所示。控制部分包括两方面:发电机侧输出电功率控制;网侧直流母线电压控制。由于篇幅受限,发电机转子励磁电流控制将在以后相继论文中单独讨论。 其中 ωr为发电机转子机械角速度,uA、uB、uC分别为发电机定子三相电压,iA、iB分别为发电机定子A、B 相绕组电流,Udc为直流母线电压,uga、ugb、ugc分别为网侧变换器输出三相电压,iga、igb、igc分别为并网三相电流,ega、egb、egc分别为电网三相电压,C 为直流母线电容,L为网侧滤波器电感。
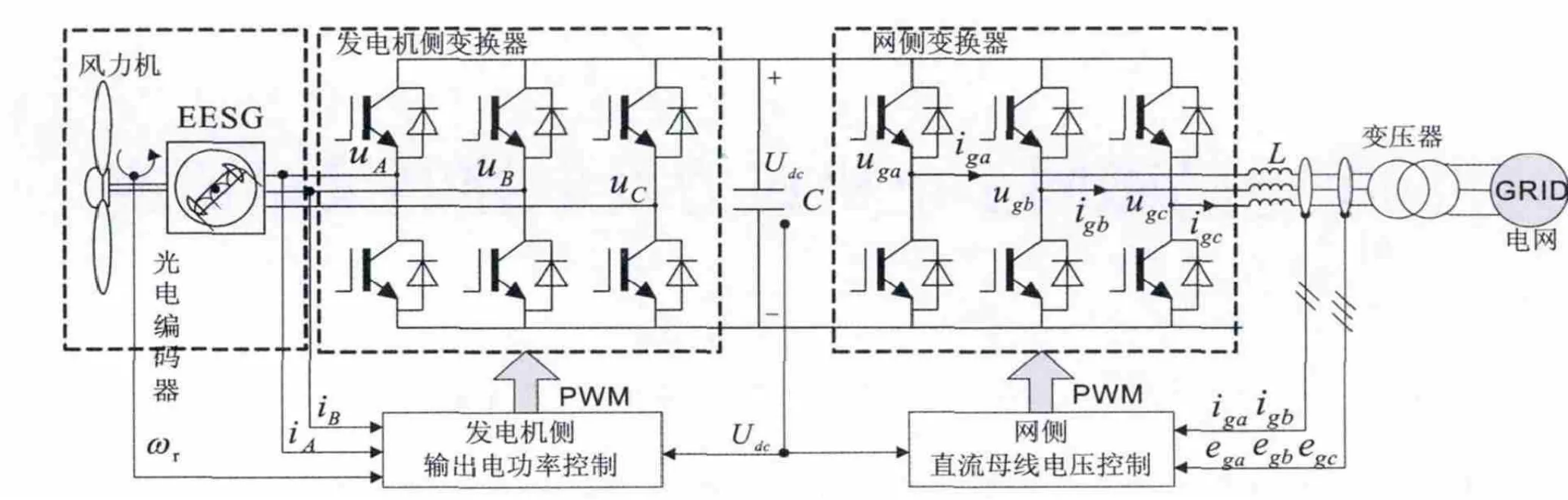
图1 风力发电系统结构框图
1.1 发电机侧输出电功率控制
发电机对外输出的电磁功率Pe如下:

从式(1)可知,在一定的转子角速度ωr情况下,快速控制电磁转矩Te即可快速控制发电机对外输出功率。本文采用直接转矩控制策略,以期实现发电机电磁功率的快速控制。
一般电励磁同步发电机转子上具有阻尼绕组,当发电机处于稳态运行时,阻尼绕组中没有电流;当发电机处于动态过渡过程时,阻尼绕组感应电流,阻碍气隙磁场的变化。定义定子磁链矢量Ψs与气隙磁链矢量Ψm夹角为δsm,即为转矩角,则发电机产生的电磁转矩如下:

式中:Lsσ为定子绕组漏感;Pn为磁极对数。由于阻尼绕组作用,使得气隙磁链为一个大惯性变量(时间常数一般大于10 ms),在几个控制周期(μs级)内,完全可以认为Ψm基本不变。这样通过控制Ψs的快速旋转,进而控制δsm即可快速控制电磁转矩Te。
定义逆时针旋转为正方向,以定子磁链所在第一扇区θ1为例。发电机侧PWM变换器在发电机定子端部产生电压矢量及其对定子磁链和电磁转矩的控制效果如图2所示。u0~u7为PWM变换器输出电压矢量,以相邻矢量夹角中心线为分界,定义6个扇区θ1~θ6。直角坐标系αβ的α轴与电压矢量u4重合,θs为定子磁链矢量Ψs与α轴的夹角。用符号“↑”和“↓”分别表示变量增大和减小。每一扇区中均可找到4个非零矢量及2个零矢量对定子磁链幅值|Ψs|及电磁转矩 Te进行控制。例如 θ1中,u2作用使 Te增大、|Ψs|减小;u6作用使 Te增大、|Ψs|增大;u1作用使 Te减小、|Ψs|减小;u5作用使 Te减小、|Ψs|增大。u0或u7作用使Te缓慢减小、|Ψs|基本不变。

图2 发电机端部电压矢量图
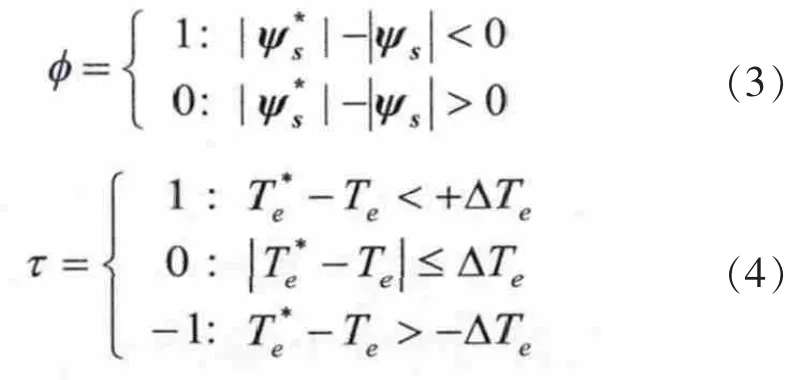
定子磁链和电磁转矩采用滞环比较器,对应输入-输出定义如下:
结合滞环比较器判断出的定子磁链和电磁转矩的变化趋势,分析各个扇区中电压矢量对定子磁链幅值及电磁转矩的控制,给出最优开关矢量表如表1所示。
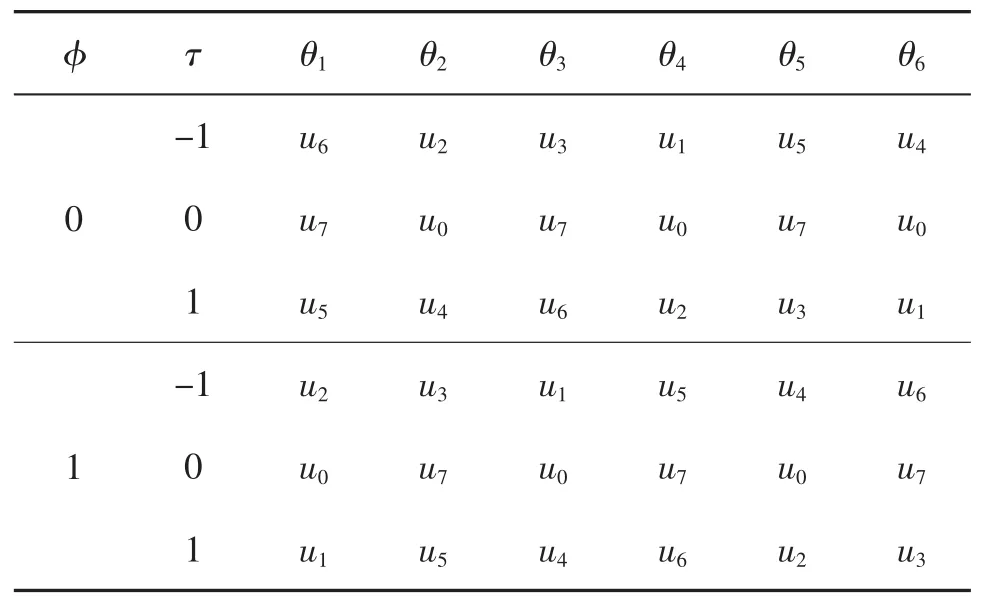
表1 EESG-DTC最优开关矢量表
定子磁链观测器采用一阶惯性环节电压模型,输入-输出传递函数G(s)如下:

其中fc为截止频率,为了有效抑制电压及电流采样中的直流偏置,同时又能满足发电系统变速范围,综合考虑取5 Hz。
根据上述机侧功率控制策略的分析,给出其对应的控制结构框图如图3所示。由最大功率跟踪模块(MPPT)给出电磁转矩给定。
1.2 网侧直流母线电压控制
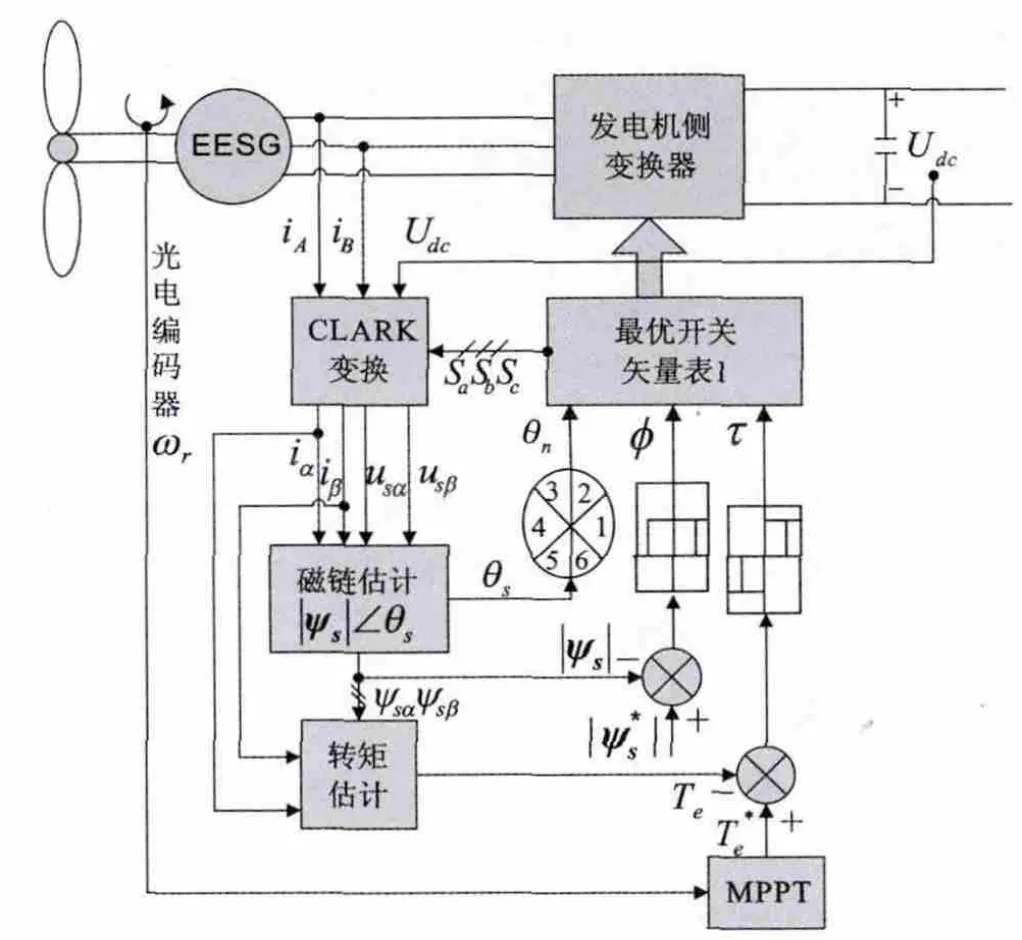
图3 机侧系统控制结构框图
网侧控制目标是在直流母线电压控制为定值情况下调节电压和频率实现并网。本文采用电网电压定向矢量控制策略,网侧坐标系定义如图4所示,eg为网侧电压矢量,ig为网侧电流矢量,ug为网侧变换器输出电压矢量,abc为三相电网静止坐标系,αβ为两相静止坐标系,dq为定向于电网电压eg的同步旋转坐标系,ω为电网电频率,θg为电角度。对应矢量在αβ轴和dq轴上的投影分别用下标“α”“β”和“d”“q”标注。
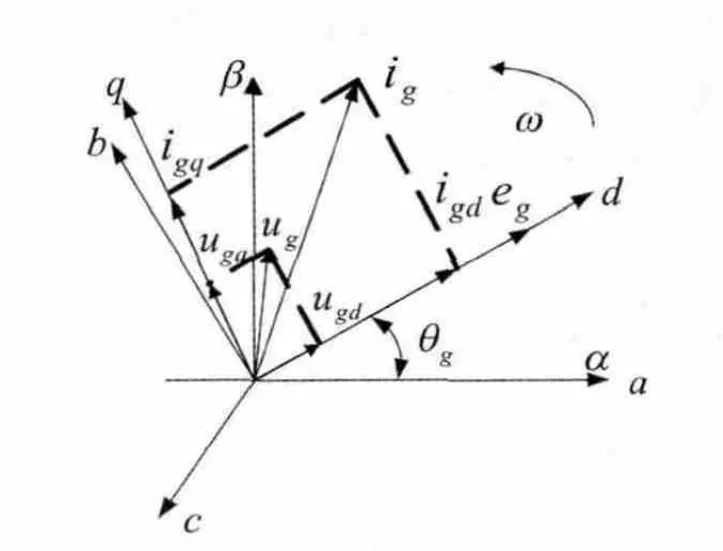
图4 网侧坐标系
网侧变换器输出通过滤波电感L与电网连接,借助于坐标的旋转变换可以推导出dq旋转坐标系下的电感支路电压方程结果为:

其中,Rg、L分别为滤波器电阻和电感。
由电网电压定向得egd=|eg|,egq=0,所以流进电网的瞬时有功功率P和瞬时无功功率Q分别如下:

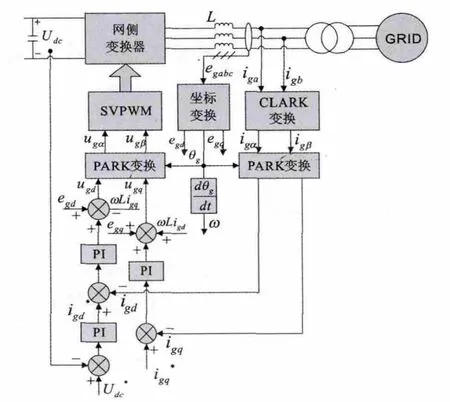
图5 网侧系统控制结构框图
根据式(8)、(9)可见,流进电网的瞬时有功功率和瞬时无功功率可以分别通过电网直轴电流igd和电网交轴电流igq来控制。
根据上述网侧控制策略的分析,构建网侧PWM变换器控制结构框图如图5所示。采用dq轴并网电流内环PI控制器调节电网电流,采用直流母线电压Udc外环PI控制器维持直流母线电压恒定。为了解决在dq坐标系下由输出滤波器L带来的耦合影响,在控制中分别加入了前馈补偿项。
2 实验研究
实验中采用的电励磁同步发电机参数如表2所示。系统控制周期60 μs。
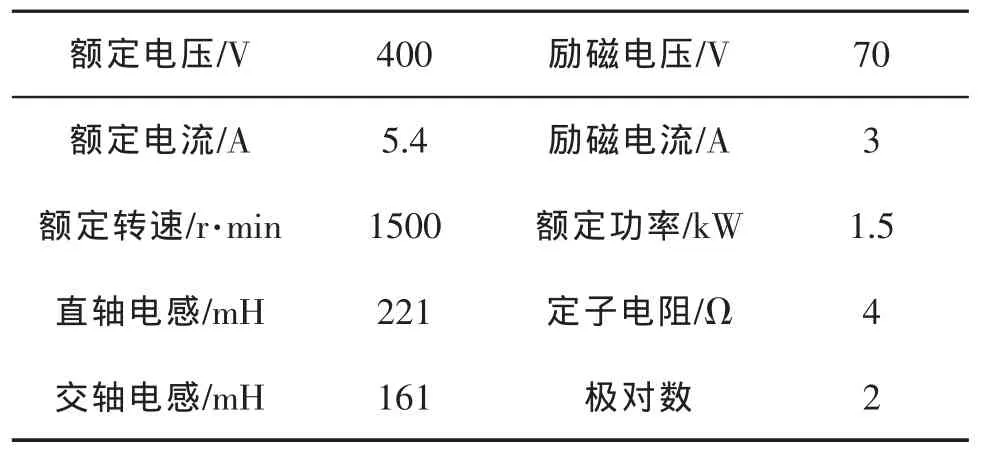
表2 电励磁同步发电机参数
2.1 风力机模拟
由空气动力学特征可知风力机的输出机械功率Pm为:

式中:ρ为空气密度;S为风力机叶片横扫面积;V为风速;Cp为风能利用系数。定义叶尖速比λ为:

式中:R为风力机叶片半径。并将式(11)代入式(10)得:

当Cp为最大值Cpmax时风力机输出机械功率Pm达到最大值Pm-opt,不同风速时风力机输出机械功率Pm与机械角速度ωr关系曲线如图6所示。
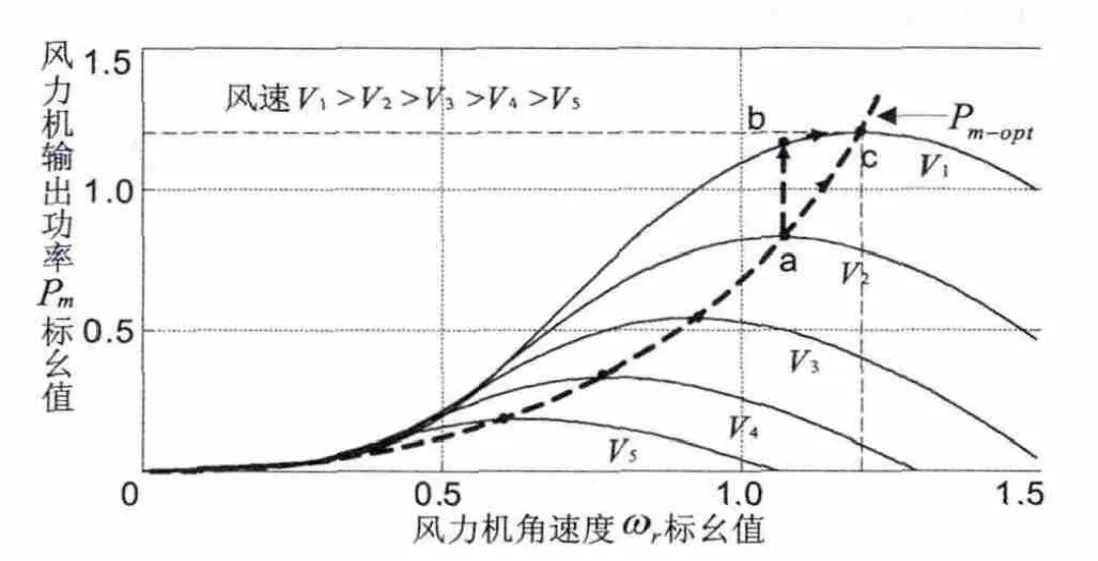
图6 风力机功率特征曲线
实验中采用功率、转速、电流三闭环控制的直流电动机来模拟风力机,对应的控制结构框图如图7所示。根据外界风速V及机械角速度ωr,查图6曲线得风力机输出机械功率给定值Pm*,然后利用三闭环结构实现实际机械功率Pm跟踪其给定值,以达到模拟风力机的目的。
2.2 实验研究

图7 风力机模拟系统控制结构框图
利用TMS320LF2812DSP全数字控制平台,采用C语言编写软件对所设计系统进行实验研究。电励磁同步发电机励磁电流控制为1.5 A。其中机侧定子磁链给定|Ψs*|为0.45 Wb, 转矩误差带 ΔTe为0.000 05 N.m,直流母线电压控制为270 V,网侧直流母线电压外环、d轴电流内环、q轴电流内环比例系数分别为:0.01,65,45,积分系数分别为:4,13.33,5。文章并以机侧传统矢量控制策略实验与本文控制策略实验作比较,传统控制策略采用d轴给定电流为零的三相电流滞环控制策略。
当网侧q轴电流为0时,发电机输出电磁功率并网稳态实验波形如图8所示。与传统方法比较,从实验结果可见:发电机功率输出更加稳定,波动更小,直流母线电压为270 V,电网电流波形正弦度良好,且与电网电压基本同相位。
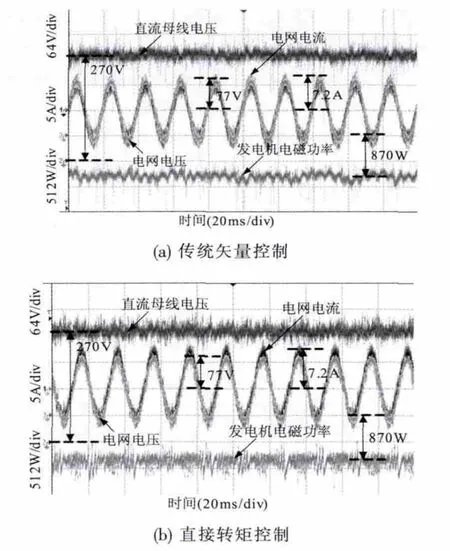
图8 稳态实验波形
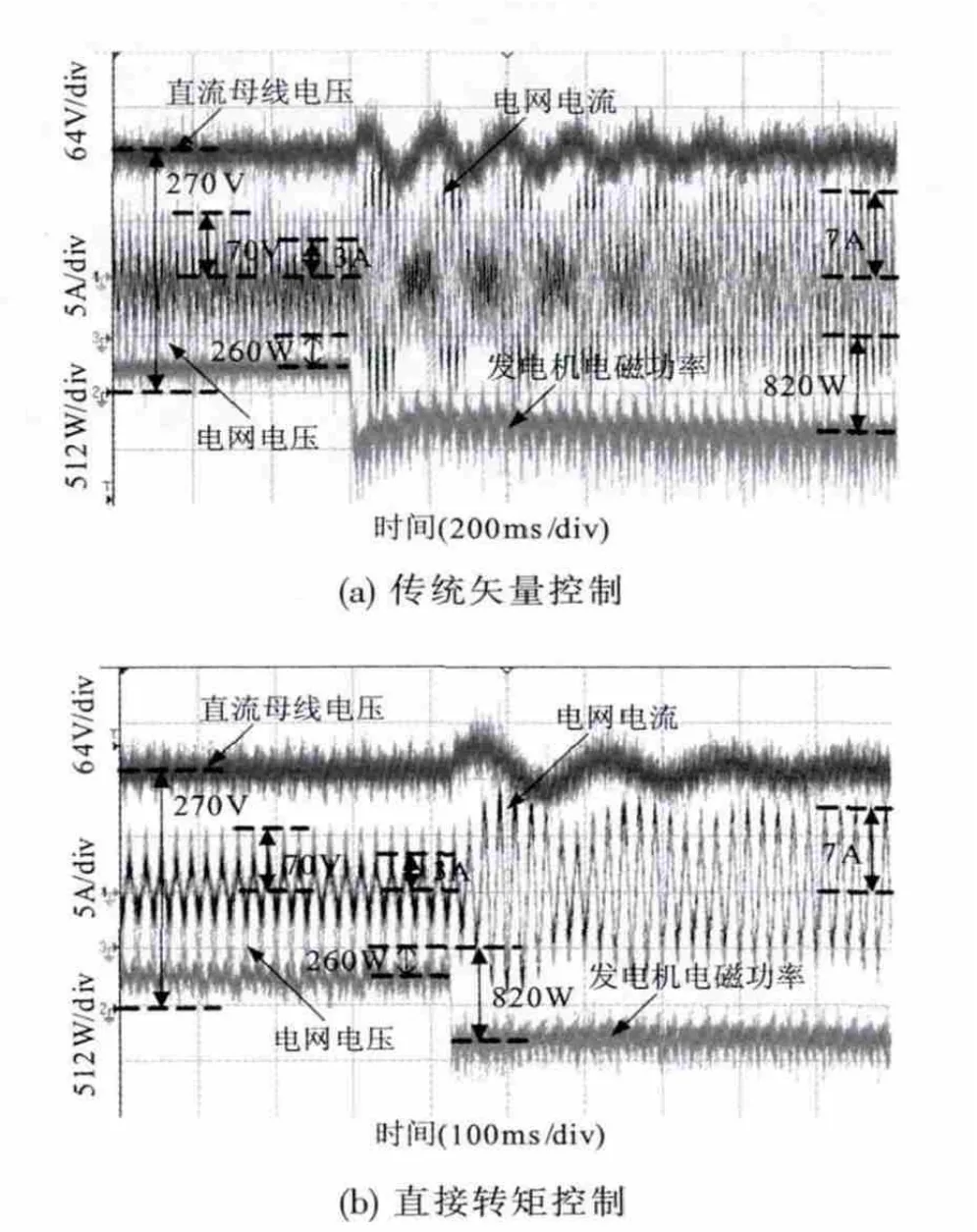
图9 动态实验波形
当网侧q轴电流为0时,发电机电磁转矩由-1 N.m阶跃到-5 N.m时的动态实验波形如图9所示。与传统方法比较,从实验结果可见:(1)传统方法发电机输出电磁功率1 200 ms才能达到稳定;而本文控制策略发电机输出电磁功率响应迅速且能瞬间达到稳定;(2)阶跃瞬间,直流母线电压、电网电流有轻微震荡,且震荡时间更短,能更快达到稳态值,动态效果好;(3)并网电流、并网电压始终保持近似同相位。
当网侧q轴电流不同(4 A,-4 A)时网侧实验波形如图10所示。从实验结果可见:通过控制网侧q轴电流,可以灵活且稳定控制网侧功率因数。
3 结论
本文针对并网型电励磁同步电机风力发电控制策略进行详细研究,并采用以TMS320LF2812为核心的全数字系统进行实验验证。实验结果表明:
(1)机侧采用直接转矩控制来对电励磁同步发电机的定子磁链和电磁转矩快速直接控制,实现了发电机电磁功率更加快速而平稳的控制,对风力发电中时刻变化的随机风有更快的响应和更稳定的功率调整;
(2)网侧采用电网电压定向矢量控制,在保证了直流母线电压控制为270 V情况下,同时实现了并网的快速而平稳控制。
本文机侧和网侧控制策略的研究为并网型电励磁同步电机风力发电系统的深入研究奠定了重要基础。
[1]牟迈.风力发电机市场品牌集中度趋高,质量稳定性仍待提升[J].风能,2011(5):42-44.
[2]M depenbrock.Direct self-control(DSC)of inverter-fed induction machine[J].IEEE transactions on power electronics,1988,3(4):420-429.
[3]L Zhong,M F Rahman,W Y Hu,et al.Analysis of direct torque control in permanent magnet syn chronous motor drives[J].IEEE Transaction on Power Electronics,1997,12(3):528-535.
[4]Pyrhonen O.Analysis and control of excitation,field weakening and stability in direct torque controlled electrically excited synchronous motor drives[D].Switzerland,Lappeenranta University of Technology,1998.
[5]Pyrhonen J,Niemela M.Test results with the direct flux linkage control of synchronous motors[J].IEEE AES Systems Magazine,1998(4):23-27.
[6]霍现旭,胡书举,许洪华.电励磁风力发电系统机侧控制策略研究[J].电机与控制应用,2012,39(3):48-52.
[7]Youssef Errami.Control Strategy for PMSG Wind Farm Based on MPPT and Direct Power Control[C].Multimedia Computing and Systems(ICMCS),2012 International Conference on,2012(5):1125-1130.
[8]Youssef Errami.Maximum Power Point Tracking Strategy and Direct Torque Control of Permanent Magnet Synchronous Generator Wind Farm[C].Complex Systems(ICCS),2012 International Conference on,2012(11):1-6.
猜你喜欢
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年5期)2015-04-09 11:30:46
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年11期)2014-04-04 09:21:36