内河控制河段智能助航系统设计与应用
2013-12-23 06:27杨品福
武汉理工大学学报(信息与管理工程版) 2013年3期
杨品福
(长江航道局 规划基建处,湖北 武汉430010)
内河水运具有运能大、占地少、能耗低等优势,特别是长江干线已成为世界上运量最大、运输最繁忙的通航河流,对促进流域经济协调发展发挥了重要作用。然而,在长江上游分布有大小几十个控制河段,这些航段中大都水深流急、狭窄、滩多,对船舶安全航行构成威胁。
助航系统是帮助内河船舶安全、经济和便利航行而设置的重要航道通航辅助设施,包括视觉航标、无线电航标以及控制河段信号台等[1-2]。
传统的助航系统主要采用视觉航标、悬挂通行信号标志牌等方法控制船舶航行。沿江经济的高速发展,带来了水运的空前繁荣,航行在内河的船舶密度、船型及营运组织形式发生了很大变化,在雾天、夜晚能见度低等复杂通航环境条件下,对助航设施提出了新的要求[3-4]。笔者主要研究内河航道助航智能化的关键技术,提出了内河航道智能助航系统研制与应用的技术路线,从内河航道助航系统设计方法与技术标准、关键技术、装备研发和系统应用等层次上对系统开展了深入研究,研究结果对提高内河航道服务品质,提升内河航道通过能力具有一定的作用。
1 内河航道AIS 关键技术研究
船舶自动识别系统(automatic identification system,AIS)是一种工作在甚高频(VHF)频段双固定频点的窄带无线数字通信系统。它由船舶终端、助航设备终端、基站和搜救飞机等组成,是一种新型的集网络技术、现代通信技术、计算机技术和电子信息显示技术等于一体的数字助航系统。AIS 通过VHF 频道将船位、船速、航向及航向变化率等船舶动态信息及船名、呼号、吃水及危险货物等船舶静态信息向附近水域船舶及岸台广播,使邻近船舶及岸台能及时掌握附近海面所有船舶的动静态资讯,实现船舶之间的实时通信,会遇船舶可以据此采取必要避让行动,对船舶之间的有效避碰,保障航行安全有很大帮助[5-6]。
AIS 系统中的每一个节点,都具有双向的通信能力,从而为应用拓展提供了极大的方便。以AIS 为基础的多种技术结合,已经成为国内外的研究热点。其中,以AIS 与雷达、ARPA(automatic radar plotting aids)技术的结合,最为引人关注[7]。但是,由于控制河段地形环境的特殊性,AIS 技术在助航系统应用中存在许多问题。如内河环境的AIS 通信链路的可靠性不高、缺少内河AIS 基站布设的评价手段、内河AIS 船台功能单一等。
通过现场试验,发现市区的非法无线电信号会对AIS 链路产生严重影响,不利于AIS 基站等设施的布设,但是长江中上游控制河段大多数位于闹市范围内。试验中还发现,同样是162 MHz附近的干扰信号下降到一定程度时,这类干扰对AIS 链路无影响。因此,为适应内河控制河段闹市、山区等特殊地理环境,在设计用于内河AIS 终端设备过程中,应加强抗干扰及功率自适应方面的考虑。AIS 干扰噪声分析及改进后的产品实物图如图1 所示。

图1 AIS 干扰噪声分析及改进后的产品实物图
2 内河控制河段雷达船舶识别装置
雷达船舶信息识别装置采用雷达技术可对船舶的航行状况进行高效、准确地识别,是港口、桥区等重要繁忙区域船舶监管的主要手段。雷达船舶识别装置通过雷达扫描对雷达覆盖区域的船舶位置和航行状况进行侦测[8]。它的优点是可以实现覆盖水域船舶的主动侦测而获取船舶的位置、航速和航向信息,且刷新速度快、受雾天和夜晚等低能见度条件干扰较小。但是仅通过雷达信号无法获取船舶如船名、呼号等静态信息,且在地处控制河段的山区雷达信号易受干扰,给雷达信号的数字识别增加难度。在内河控制河段智能助航系统设计中,综合利用AIS、雷达、红外视频等多种手段获取数据,对信号进行融合处理。主要融合处理方法如下:①雷达目标与AIS 目标数据的融合,通过GPS(global positioning system)时间同步,多次比较雷达跟踪数据和AIS 目标数据,在经纬度位置与GPS 时间戳都比较相近的情况下,自动进行融合;②多个雷达目标数据融合,通过GPS 时间同步,多次比较来自不同雷达的跟踪数据,在经纬度位置与GPS 时间戳都比较相近的情况下,自动进行融合;③雷达数字视频与电子海图叠加显示,客户端在接收到一条扫描线的雷达数据后,采用墨卡托投影公式算出雷达扫描线的显示坐标,在海图显示窗口内添加一个雷达数字视频图层,并以高速的像素级处理方式进行叠加显示;④雷达目标电子海图显示,结合雷达目标的位置、航向、速度等物理参数和AIS 数据中的船名、业主、任务等更加详细的个体信息,在电子海图上显示所管理水域内的处于作业、靠泊或航行状态的船只;⑤预警区域报警,在电子海图平台上,操作人员可设定任意形状的预警区域,系统自动对雷达目标数据进行评估,确定重点监视目标,判断船舶是否驶进禁航区或警戒线,当有船舶越过警戒线或进入警戒区时,系统能够自动报警。
雷达信息采集通信协议是后续采集模块和数据传输与服务模块软件实现的依据。系统整体采用的是C/S 结构,使用TCP/IP 传输协议,雷达信息采集器作为客户端连接系统。
3 内河电子航道图引擎研制关键技术
电子海图是描述海域地理信息和航海信息的数字化产品,是数字海图的一种。其内容以海域要素为主,详细表示航行障碍物、助航设施、港口设施和水流等要素,陆地着重表示沿海的航行目标和主要地物地貌。
电子海图显示与信息系统(ECDIS)是指符合有关国际标准的船用电子海图系统。它以计算机为核心连接定位、测深、雷达、AIS 等设备,以电子海图为基础,综合反映船舶行驶状态,为船舶驾驶人员提供各种信息查询、量算和航海记录,是一种专题地理信息系统。
目前国内外水上运输界使用的电子海图是按照S-57 标准生产的电子航海图(ENC),S-57全称为国际海道测量组织(IHO)第57 号特殊出版物《数字海道测量数据传输标准》,该标准被IHO 在S-52《电子海图显示与信息系统海图内容与显示规范》中规定为用于国际间数字海图交换的官方海图数据标准。从严格意义上讲,它仅是一个数据传输标准,所规定的数据格式是一个顺序读取的文件格式,不可能实现数据的快速检索,因此,常规的GIS 显示产品(如ARC GIS 等)不适合应用于电子海图显示系统。在笔者研制的系统中,应用了自主开发的基于S-57 标准的电子航道图引擎。
在基于S-57 标准的电子航道图引擎开发过程中,提出了长江电子航道图动态更新机制,解决了电子航道图标绘及实时更新、船位快速更新等技术,提出了基于电子航道图信息的三维航道曲面构建方法,研制了长江电子航道图开发引擎,解决了长江电子航道图应用核心技术问题。
4 内河控制河段多功能航标装置
航标灯是为保证船舶在夜间安全航行而安装在某些航标上的一类交通信号灯。它在夜间发出规定的灯光颜色和闪光频率,达到规定的照射角度和能见距离。航标灯有固定灯标、灯浮标、灯船和灯塔4 种。固定灯标、灯浮标和灯船是作导航和警告用的信标,灯塔在海上昼夜发出可识信号,供船舶测定位置和向船舶提供危险警告[9-10]。航标灯多使用蓄电池、太阳能电池作电源,较大型灯塔则采用柴油发电机组作为主电源。
航标主要功能是在夜间为过往船只提供定位参考信号,其工作是否正常直接影响船舶安全航行[11]。然而,传统航标灯工作状态主要依赖人工巡查,存在检查不及时等问题。同时,航标地处航道重要位置,可利用其作为载体,实时采集水流、水深和水位等信息。
多功能航标设计的思想是不间断监测航标灯工作状态、水流、水深、水位、电池剩余容量和浮标船所处位置等信息,并实时传送至岸上监控中心,在监控中心还可以远程控制航标灯的开关。多功能航标终端不影响航标灯和太阳能电池的工作,当多功能航标终端出现故障时,航标灯仍能独立工作,并保持原有灯质功能。
对于浮标,研究中设计了倾斜报警和撞击报警功能。由于浮标撞击情况比较复杂,采用撞击报警等级可调的方式。浮标船上供电主要依靠太阳能蓄电池,电池容量有限,因此要求系统具有低功耗特点。为降低设备功耗,系统设计中采用最低功耗特点的睡眠机制。正常情况下,只做一般的定期数据上传,但在系统有告警发生或管理中心下达控制命令时,唤醒系统,即无论终端处于何种工作状态,终端射频模块接收后立即激活主系统工作,实现实时的触发功能。
在控制河段多功能航标设计中,其主要功能可归纳为如下几点:
(1)遥测功能。实时检测浮标经纬度位置信息,撞击加速度、蓄电池输出电压、工作电压和电流、太阳能充电电压和电流。遥测航标灯工作状态(运行/关闭/熄灭)、灯质信息(预设灯质/当前灯质)、日光值、日光阈值(可以修改),以及工作电流。遥测多功能航标的温度、湿度、大气压强、风速、风向、能见度、水流和水深等航道水文气象信息,为航道监管提供实时信息服务。
(2)遥控功能。通过监控软件可远程实施多功能航标终端的遥控功能,每条遥控设置指令都有独立的编号和严格的应答机制,系统自动记录操作人、操作时间、操控内容和结果。操作遥控设置功能包括:航标船正确位置定位,漂移报警距离设置,工作模式设置(休眠、省电、轮巡、报警模式),航标灯的工作参数设置,以及航标灯的强制开关远程操作等。
(3)实时报警功能。系统设计中,将数据采集、报警判断、工作模式转换等功能在航标终端上完成,提高了报警的主动性。航标终端始终处于运行状态中,当发生欠压、过压、充电异常、漂移、灯质错误、状态错误(白天灯亮或晚上灯灭)、碰撞、能见度过低、水深不足、水流过快等异常情况时,终端设备主动上传报警信息,实现航标实时报警功能。
(4)现场维护功能。基层航标维护工作人员在航标站船上通过现场多功能航标终端监控器可以对本站所管辖的航标实现以上遥测遥控功能,实现辖区航标的数据查询和图文统计分析。航标维护人员到达现场还可以通过标准通信接口用便携电脑直接对多功能航标终端进行检验,调测多功能航标的实时和历史数据,完成遥控设置操作,实现航标的现场维护。多功能航标网络结构及安装实物如图2 所示。

图2 多功能航标网络结构及安装实物图
5 内河控制河段助航示范系统设计
为推广内河控制河段助航关键技术研究成果的应用,笔者选择了长江重庆某信号台及其指挥的控制河道进行智能助航系统的示范试点。该信号台及其指挥的控制河道具有典型意义,其位于市区,且汇集了川江航道弯、窄、浅、险特征;汛期水流湍急、流态紊乱,水位陡涨陡退频繁,变化较大;枯水期航道弯曲狭窄、滩险密布、雾大瘴浓,航行条件比较恶劣,其界面截图如图3 所示。系统设计建立了雷达系统、AIS 系统、闭路电视监控(CCTV)系统、多功能航标遥测遥控系统和水位测量系统等。通过与航道业务系统整合,在统一电子航道图界面上显示控制航道水域的助航信息,如雷达、AIS、CCTV、航标工作状态和水文气象等数字航道信息,方便管理人员直观了解控制航道的全方位实时情况,提高监管效率;系统还可以对历史数据进行回放,真实还原事件现场;通过对多种数据源的综合统计分析,为紧急状态下辅助决策提供支持,提高航道应急指挥水平。
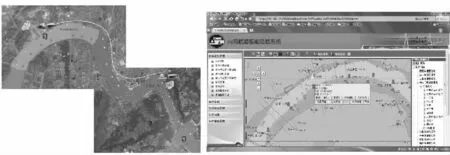
图3 示范系统地理位置及软件界面截图
整个系统由监控服务器、航标遥测遥控终端、水深遥测遥报终端、AIS 船台、雷达系统、CCTV 系统以及通信系统组成。系统总体框架如图4 所示。
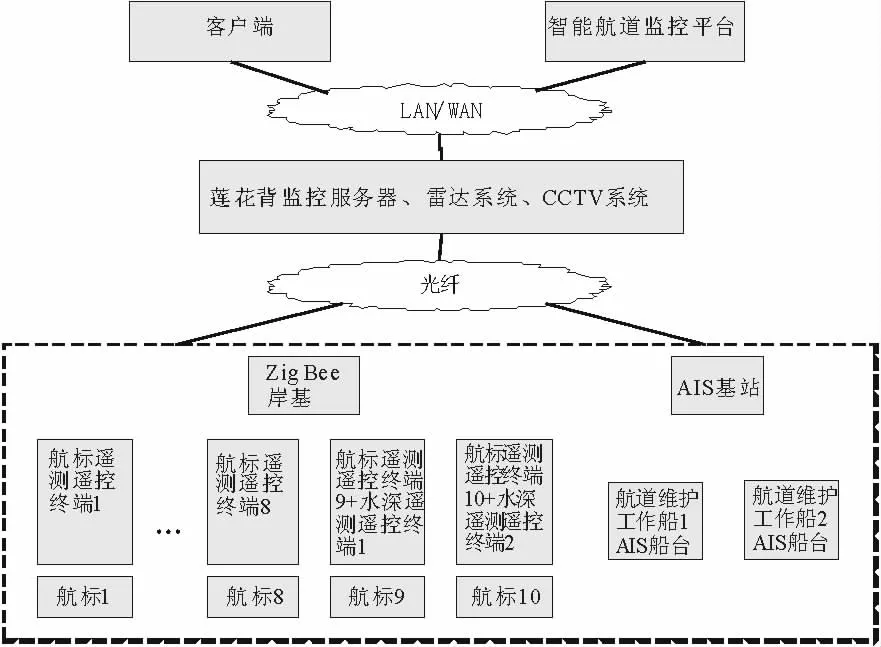
图4 示范系统功能模块结构图
监控服务器负责航标遥测遥控终端、水深遥测遥报终端、AIS 船台等各种信息收集、雷达数据处理,以及控制河段视频数据采集等;可通过图形化人机界面,监视、查询和分析设备运行信息;监控服务器的数据库能够实现系统与系统间的数据共享,并可以为上级监测系统提供航道设备运行信息。
客户端可以通过网络查询,显示航标、航道和工作船舶等信息。
智能航道监控平台负责整合监控服务器中的各种数据资源,包括航标数据、航道水深数据和船舶数据等。
航标遥测遥控终端是航标的基础数据采集平台,负责采集、控制并发送航标设备的运行参数,执行监控服务器下达的遥控指令。
水深遥测遥报终端负责采集并发送水深数据,执行监控服务器下达的遥控指令。
航道维护工作船AIS 船台为船舶提供导航和避碰服务,并实时广播船舶的航行信息。
通信系统由ZigBee 岸基、AIS 岸基以及光纤网络组成,负责传输航标运行参数及控制航标指令数据。
6 结论
针对传统视觉航标无法完全满足内河船舶助航需求,控制河段船舶指挥效率有待提升等问题,结合助航系统的新内涵,笔者讨论了以内河航道助航系统的科学布设、创新设计以及智能应用为目标,提出了内河航道智能助航系统研制与应用的技术路线,研究了内河航道助航系统设计方法与技术标准、装备开发等关键技术,同时,介绍了内河控制河段智能助航系统功能设计和网络结构。应用结果表明,笔者提出的关键技术能够满足复杂地形环境的控制河段通航数据采集和网络传输要求,取得了较好的应用效果。
[1] 黄锦标. 内河海事监管模式探索[J]. 世界海运,2010(10):147-150.
[2] PAKE J H. Establishment of aids to navigation management and information center[C]//XVth IALA Conference.[S.l.]:[s.n.],2002:276-282.
[3] 中华人民共和国交通运输部.航标遥测遥控系统技术规范[M].北京:人民交通出版社,2010:32-98.
[4] 艾廷华,王洪.电子航道图与航标遥测监控系统[J].武汉大学学报:工学版,2008,33(4):347-351.
[5] 魏武财,郑佳春,何小兵. 基于AIS 的航标助航信息服务系统[J]. 集美大学学报,2011,16(3):107-111.
[6] 袁安存,张淑芳. 通用船载自动识别系统国际标准汇编[M].大连:大连海事大学出版社,2005:76-103.
[7] TETREAULT B J. Use of the automatic identification system(AIS)for maritime domain awareness[C]//Proceedings of Mrs/IEEE Digital Object Identifier.[S.l.]:[s.n.],2005:6-13.
[8] RICKETT B. A vision of future applications for an automotive radar network[C]//The 1st International Workshop on Intelligent Transportation (WIT 2004).Hamburg:[s.n.],2004:23-24.
[9] 郑佳春.基于无线传感网络的电子航标系统研究[J].中国航海,2008,31(3):214-217.
[10]吴允平,陈聪慧,李旺彪,等.嵌入式航标遥测监控终端的研制[J].微计算机应用,2008,29(12):83-86.
[11]张杏谷,魏武财,彭国钧,等.电子航标服务信息系统(E-ANSI)的研究[J].中国航海,2007(3):22-25.
猜你喜欢
珠江水运(2021年20期)2021-12-09
航海(2020年4期)2020-08-17
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
少林与太极(2018年9期)2018-09-28
制造技术与机床(2017年10期)2017-11-28
孙子研究(2016年4期)2016-10-20
现代工业经济和信息化(2016年6期)2016-05-17
工业设计(2016年11期)2016-04-16