风电机组时序试验分析*
2013-12-18 03:56:08兰涌森陶友传欧阳海黎刘杰余强
风能 2013年3期
兰涌森,陶友传,欧阳海黎,刘杰,余强
(1. 重庆大学电气工程学院,重庆 400044;2. 国家海上风力发电工程技术研究中心,重庆 401122)
0 引言
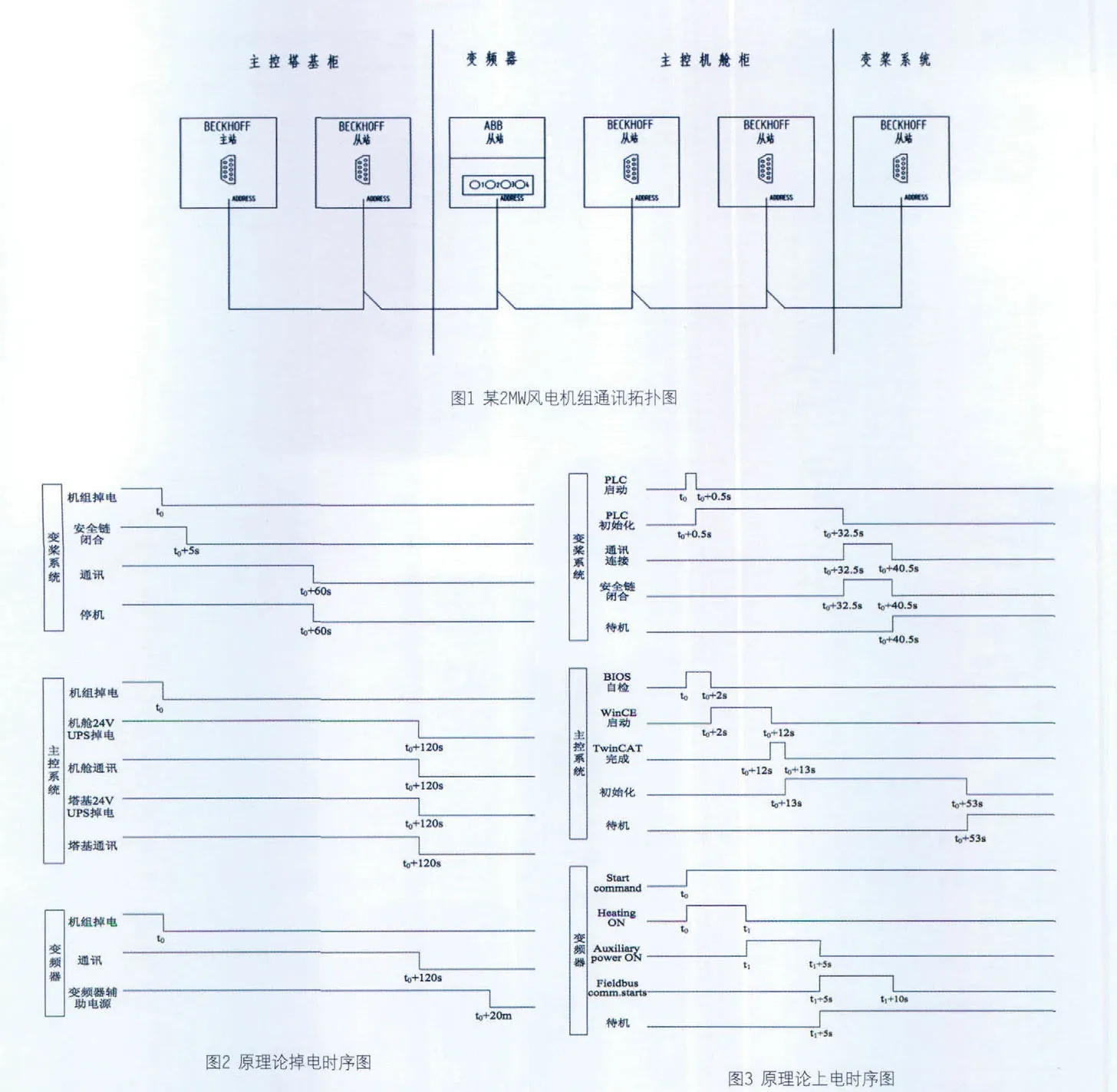
在大型风电机组系统设计中,一般采用由工业PC、I/O和现场总线组件等集合而成的模块化分布式控制系统,以满足风电机组的控制需求。此类模块化控制系统一般安装于变桨、变频、主控等电控柜中,组成独立的主站、从站,实时监测、控制风电机组的运行状态,并具有完整的维护诊断功能,是风电机组的重要组成部分。正确的时序分析对于深入掌握风电机组运行特性,优化风电机组运行控制具有重要意义。以某2MW风电机组为例,其分布式控制系统通讯拓扑图见图1。
可见,该风电机组控制系统由主控塔基柜、变频器、主控机舱柜、变桨系统4部分子系统组成,共计5个从站、1个主站,主站位于主控塔基柜内。
该风电机组原理论掉电时序见图2,原理论上电时序见图3。为便于验证分析,对该2MW风电机组进行掉电、上电试验,测试验证其相应时序。
1 试验结果
1.1 掉电试验
从图2可以看出,若该机组系统发生掉电工况,掉电时间标记为t0,变桨系统将在t0+5s断开变桨系统安全链,在t0+60s关闭后备电源,同时变桨系统从站通讯丢失,进入停机状态。塔基和机舱的PLC则会在t0+120s关闭其后备电源,同时通讯丢失。变频器由于专用UPS可提供20min的辅助供电,系统保持运行,但通讯异常。此掉电时序下,由于变桨从站先于其他站点失去通讯,主站无法检测到变桨通讯存在,必然会报出变桨通讯故障。同时,由于塔基控制柜和机舱控制柜后备电源的供电关闭时间相同,如果由于硬件动作时间差异导致机舱先掉电,机舱所有高电平正常,低电平异常类I/0信号均会因失电而无高电平输出,主站检测不到此类信号则报出故障,如发电机保护类故障、防雷器反馈故障等。
为验证以上分析,将机舱UPS掉电延时时间设置为60s,塔基UPS掉电延时时间设置为80s,进行掉电试验并通过监控系统进行监控记录。对表1进行分析可发现,掉电过程所报故障类别主要分为五类:变桨系统掉电必报故障、电网类故障、安全链故障、保护类故障和通讯类故障。变桨系统掉电必报故障是系统安全设计,电网类故障则为实际故障;而保护类故障和通讯类故障实际并未发生,属于掉电过程系统派生故障,是没有实际意义的,不应该报出。
为进一步验证时序的合理调整可以避免派生故障的产生,以变桨系统掉电时间为基准,将机舱UPS供电时间设置为60s,塔基UPS供电时间设置为50s进行试验,调整后该机组新的掉电时序如图4所示。


表1 掉电时序故障列表

表2 不同时序掉电故障列表对比
由表2可以看出,通过设定UPS持续时间重新调整机组的掉电时序后,机组掉电故障列表中不再有保护类故障和通讯类故障。经过多次重复试验验证,在确保机组能够正常地完成停机动作的前提下,通过掉电时序的调整优化,使机组主控PC在子系统掉电前关闭,可以避免通讯类和保护类共计45个派生故障报出。
1.2 上电试验
通过对主控系统进行上电启动测试,得出主控系统PLC的硬件启动时间在ms级,但是WinCE系统的启动完成时间大约在t0+30s~t0+32s之间,TwinCAT的启动完成时间大约在t0+40s~t0+48s之间,详细结果见图5。
由于TwinCAT是在WinCE启动未完成就开始启动,且TwinCAT的启动无显著特征,现场无法通过测试得到TwinCAT准确的启动时间。通过对WinCE系统启动过程分析,该系统的基本启动顺序如下:调用Startu函数→OALStartUp函数→KernelStart函数→ARMInit函数→NKStartup函数→KernelSstart函数(此函数调用完成即开始启动第一个启动项)→KernelInit函数→FirstSchedule函数(界面启动完成)。由于启动项的多少决定了WinCE系统的启动时间,目前无法明确TwinCAT开始启动的时间。控制器厂家提供的启动顺序如下:
1.控制器上电 ms级
2.BIOS自检 2s
3.WinCE系统启动直到完成 10s
4.TwinCAT系统启动直到完成 1s
5.System Manager启动对PLC硬件完成检查 ms级
6.外部IO信号转换到输入缓冲区 ms级
7.输入缓冲区映射到PLC的I,Q区 us级
8.控制器程序顺序执行 ms级
按照控制器厂家的启动顺序,TwinCAT的启动时序应如图6所示。
若TwinCAT的启动时序同控制器厂家的数据一致,则不应出现上电派生故障。那么原因可能有两种:通讯问题或者System Manager与控制程序的时序实际是颠倒的。通过现场的观察,硬件的实际启动时间在ms级,通讯模块也在2s内恢复正常,通讯问题可排除。System Manager的功能是配置组态、扫描端口,若控制程序比System Manager先完成启动,控制程序扫描故障信息时System Manager并未完成对端口的扫描工作,而System Manager对I/O端口的默认值为FLASE,则高电平正常低电平故障的I/O端口均会被判断为故障,通讯类故障同理。




表3 不同时序上电故障列表对比
因此System Manager与控制器程序的时序应进行调整,TwinCAT实际启动时序应如图7所示。对机组进行上电启动试验验证分析结论,试验结果如表3所示。为了进一步测试System Manager与控制程序启动的实际时序差,即t2与t3。对偏航电机保护故障1、2、3、4分别采取1s、3s、5s、7s的延时处理然后进行上电启动测试。测试结果表明:延时1s的偏航电机1保护故障每次均报出;延时3s的偏航电机2保护故障时报时不报;延时5s的偏航电机3保护故障和延时7s的偏航电机4保护故障均未报出。因此,可以认为t2与t3的时间差在3s到5s之间。由于保护类故障的报出并无实际意义,可在控制程序中根据t2与t3的时序差对此类故障进行延时处理,确保System Manager对I/O端口的扫描完成先于控制程序对故障的扫描,避免派生故障的报出。调整时序后上电故障列表对比见表3。从表3可以看出,新时序上电故障中除电网故障和安全链故障真实存在并报出外,其余保护类故障均未报出,共计减少派生故障40个,真实地还原了故障记录。
2 结论
本文以某2MW风电机组为例,对风电机组系统掉电、上电时序进行试验分析,采用重新整定系统时序、增加派生故障触发延时等方法消除由电网掉电、上电等因素导致的派生故障。结果表明:本文方法能有效消除派生故障,还原真实故障记录,有利于正确地分析判断风电机组运行状态,对优化风电机组运行控制具有重要的指导作用。
[1] 德国倍福电器有限公司.TwinCAT PLC编程手册[Z].北京:德国倍福电器有限公司北京代表处,2007.
[2] 德国倍福电器有限公司.德国倍福产品选型手册[Z].北京:德国倍福电器有限公司北京代表处,2008.
[3] 张天成,岳德君.分布式专家系统中时序控制的研究与设计[J].微电子学与计算机,2007,24(10):178-180.
[4] 陈志军,徐东进.基于TwinCAT的PLC水源地远程监控系统开发设计[J].电子技术应用,2008(12):95-98.
猜你喜欢
中国农业信息(2023年3期)2023-03-18 08:19:04
中国农业信息(2021年3期)2021-11-22 06:44:48
自动化仪表(2020年10期)2020-11-13 03:31:00
大电机技术(2018年4期)2018-09-26 03:11:38
电子制作(2016年15期)2017-01-15 13:39:08
通信电源技术(2016年1期)2016-04-16 04:57:28
电源技术(2016年2期)2016-02-27 09:05:15
船舶力学(2015年6期)2015-12-12 08:52:20
电气传动自动化(2014年6期)2014-03-20 13:36:22
汽车维护与修理(2014年10期)2014-02-28 12:15:01