
MIMO雷达的干扰研究
2013-12-17 10:42董自通
电子科技 2013年3期
董自通
(西安电子科技大学电子工程学院,陕西西安 710071)
多输入多输出(Multi-Input Multi-Output,MIMO)技术能在不增加带宽的情况下,大幅提高通信系统的容量和频谱利用率,其在无线通信系统中被提出,目的是解决无线通信中信道多径衰落问题[1]。受MIMO技术在通信领域发展中的启发和基于MIMO技术所体现出的优越性,近来美国学者提出了MIMO雷达。
MIMO雷达与常规相控阵雷达不同的是:相控阵雷达希望最大化相干处理增益,因此相控阵雷达发射的是相参信号;MIMO雷达是通过满足空间分集的M个发射机发射相互正交的信号,经过目标散射后,由N个接收机接收到的信号经过计算平均后,求出目标。MIMO雷达的优点在于不像传统雷达那样存在雷达截面积(Radar Cross Section,RCS)起伏。
1 MIMO雷达工作原理与性能分析
1.1 MIMO雷达的基本工作原理
MIMO雷达研究在于如何利用发射和接收的多样性进行目标侦测,即信号通过发射端和接收端的多个天线发送和接收,每个接发天线对之间形成一个MIMO子信道,各MIMO子通道之间的信号具有一定的相互独立性,采用空间分集,从各个角度观察目标以改善目标获取的数量与质量。多输入多输出(MIMO)雷达,其基本概念是网络内多个发射站同时发射信号,多个接收站点同时接收信号。
1.2 MIMO雷达目标检测模型
发射分集的MIMO雷达,发射阵元间距较大,以利用空间分集特性,接收阵元间距较小,以便进行波到达角方向估计[2]。系统模型如图1所示,系统由M个发射阵元、N个接收阵元和一个目标组成。MIMO雷达在发射端为获取目标的空间多样性,使其发射信号之间具有独立性,要求发射阵元的间距足够大,即满足

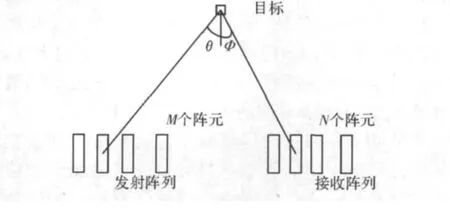
图1 MIMO雷达示意图
式中,λ为载波波长;R为发射阵元到目标的距离;D为目标横向尺寸(一般R≫Δd)。发射阵元同时发射M个相互正交的窄带信号。接收端共有N个接收阵元,为保证测角时不发生模糊,接受阵元的间距应满足

为使不同发射阵列的信号能相互正交,即满足接收机端的匹配滤波,要求发射信号有特定的频率关系[3]。正交性可以用式(3)表示

由于MIMO雷达满足空间分集与信号分集的条件,这样便形成了M×N个独立的信号通路。
1.3 MIMO雷达的优势
(1)RCS平均近似恒定。由于目标是由多数小的散射体组成,所以目标到雷达的距离,方位轻微变化都会引起目标的RCS变化,即引起反射波能量的变化。MIMO雷达利用了目标RCS的统计特性,可使目标对MIMO雷达的有效截面积近似恒定,提高了雷达的检测性能[4]。
(2)MIMO雷达的多个发射天线照射到目标的不同侧面,可以检测到更多的目标有用信息,提高目标识别能力。
(3)反隐身效果好。MIMO雷达采用宽频谱、多角度扫描,而隐身飞机则不可能做到任何角度,任何频段都隐身的效果,所以总有大的RCS被检测到。
(4)抗摧毁能力强,MIMO雷达发射天线间距大,不容易被同时摧毁,即使被摧毁若干个发射天线,但对系统的整体影响并不致命。
2 对MIMO雷达的干扰措施
2.1 假目标欺骗干扰
假目标欺骗干扰的作用原理。采用假目标和信息作用于雷达的目标监测与跟踪,使雷达无法正确地检测到真目标或者不能正确测量真目标的参数信息。
雷达组网技术的应用,使得对单部雷达的欺骗干扰容易被雷达网络所识别。为有效欺骗组网雷达,制造逼真的假目标信息,并在雷达网的多部雷达上呈现相同的航迹,并对多部网内雷达同时实时欺骗干扰。为此,必须研究多部雷达产生相关假目标航迹的原理和算法。进行距离欺骗的假目标欺骗干扰[5]。
对MIMO雷达,设其有M个发射天线,N个接收天线,当其同时对m个目标进行扫描时,在处理器输入端有M×m×N个信号输入,最后分选出m组信号。如果在每个假目标上再发射k个假信号,那么在处理器端就会有M×m×N×k个信号,假如M,m,N,k均为5,则有625个信号,而真目标只有5个,要使这个系统只处理m个真目标,运算难度较大,也会拖延计算目标参数信息所需的时间。
由于MIMO雷达探测一个大目标是将其分为多个小目标散射体,则作为假目标干扰,只要延迟时间走过的距离大于雷达分辨率,小于其距离波门,就可以实现对其最简单的一种干扰,也是在对MIMO雷达网络内,雷达参数已知较少的情况下一种比较理想、易于实现的干扰方式。
2.2 分布式干扰
分布式干扰主要采用体积小、质量轻、分布在目标干扰MIMO雷达附近的压制性噪声干扰。使用分布式干扰,由于干扰机配置在敌方纵深处,远离我方阵地,所以彻底解决了电磁兼容问题。分布式在干扰过程中具有明显的距离优势和功率优势。对压制式干扰来讲,干信比越大,雷达发现目标的概率就越小,由于分布式干扰的干扰效能在于其合成功率,在分布式干扰单元分布之后,各干扰源与被干扰对象之间距离的不确定性,带来了干扰信号相位的不确定性,增加了分析干扰效能的复杂度。
3 MIMO雷达干扰仿真
3.1 MIMO雷达的收/发信号模型
正交信号是MIMO雷达工作的基础,为获得高分辨力,MIMO雷达需要正交信号具有低自相关旁瓣,通过对接收机信号匹配滤波处理来分离发射信号分量,并要求信号间的互相关应尽可能低[1]。根据上述工作原理和图1所示,第m个发射信号sm(t)到达位于θ方向的目标时,信号为

式中,τm是相对第一个发射天线的延时,即

其中,c为光速;dt为发射天线间距;sm(t-τm)可以表示为

α1是信号传输损耗,可认为对各信号相同,位于θ处的目标被照射的和信号可以表示为

β(θ)=[1,e-jφ,e-j2φ,…,e-j2(M-1)φ]为发射导向矢量;s(t)=[s1(t),s2(t),…,sM(t)]T为发射信号向量。信号p(t)经过RCS为的目标散射,则第n个天线接收到的信号为

其中,vn(t)为第n个接收天线的噪声;α2是目标散射系数和传播损耗的总和,则总接收信号向量为

写成向量形式为

3.2 MIMO雷达功能仿真
一个4×1×4(发射天线×目标×接收天线)的MIMO雷达系统,发射信号为线性调频信号,在接收端通过匹配滤波测得目标参数信息,每次接收信号共4×1×4=16个,实际目标位于雷达15 km处。MIMO发射信号频率间隔为20 fP的各信号与接收信号匹配滤波输出,横坐标为距离信息,如图2所示。

图2 频率间隔为20 f P的各信号与接收信号匹配滤波输出
当MIMO发射信号频率间隔为300 fP时,可以直接得到目标的距离信息。

图3 频率间隔为300 fP的各信号与接收信号匹配滤波输出
3.3 对MIMO雷达的干扰仿真
接收后延迟再发射,可产生距离欺骗,且可以是多假目标干扰。(1)当只对MIMO雷达中一个雷达进行有效干扰时,在MIMO雷达接收机进行匹配滤波时,可方便地将干扰去除,而提取目标有用的信息,仿真如图4所示。

图4 当在信号中只加入一个频率值干扰信号时接收信号匹配滤波输出
虽然在第一个滤波器输出时,干扰了雷达的测距,但当将4个输出进行统计输出时,还可以得到目标在15 km的距离信息。
(2)而当对MIMO雷达阵列中所有雷达都干扰时,就可以产生有效地干扰,仿真如图5所示。
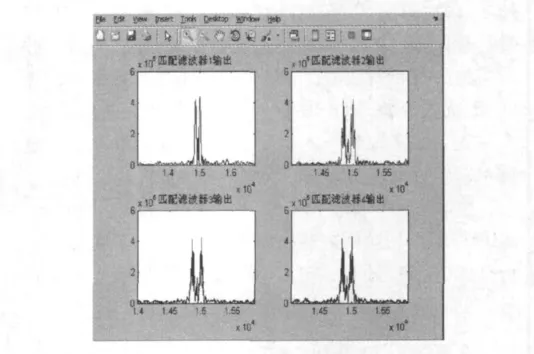
图5 接收信号与接收信号匹配滤波输出
只有对MIMO雷达中所有雷达都进行干扰时,才能对MIMO雷达系统实现有效干扰。
4 结束语
介绍了MIMO雷达的特点,建立了MIMO雷达工作模型,讨论了其性能,并针对性地给出了几种干扰方法:假目标欺骗干扰和分布式干扰,并对假目标欺骗干扰进行了Matlab仿真,取得了良好的干扰效果。MIMO雷达作为一种新体制雷达,目前应用于实战中较少,而它的成像算法有多种,对其干扰仍需进一步研究。
[1]刘波.MIMO雷达正交波形设计与信号处理研究[D].成都:电子科技大学,2008.
[2]杜宏峰.MIMO雷达的监测与估计[D].南京:南京理工大学,2009.
[3]邵慧.MIMO雷达的研究[D].西安:西安电子科技大学,2009.
[4]梁百川.对统计MIMO雷达的干扰[J].舰船电子对抗,2009(1):33-36.
[5]张锡祥.对MIMO雷达的干扰构想[J].现代雷达,2010(4):59-62.
猜你喜欢
中国交通信息化(2019年4期)2019-07-13
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
小学生导刊(低年级)(2016年5期)2016-05-27
雷达与对抗(2015年3期)2015-12-09
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
印制电路信息(2014年11期)2014-03-11
燕山大学学报(2014年2期)2014-03-11
