多功能电子系统电磁兼容任务调度方法
2013-12-17 10:42:08马晓岩杨瑞娟
电子科技 2013年3期
陈 骋,马晓岩,杨瑞娟,程 伟
(1.空军预警学院研管大队,湖北武汉 430010;2.空军预警学院4系,湖北武汉 430010)
随着信息化战争形态的不断发展,要求武器平台同时具备战场探测、电子战、通信、导航等多种能力。为确保作战平台在装备雷达、电子战、通信、导航等多种功能电子设备的同时,又不大幅增大平台的体积和重量,保持其机动性能,这就催生了一体化多功能电子系统[1-3]技术的发展。所谓多功能电子系统,即通过计算机和数字技术,集告警、侦察和干扰于一身,共享系统资源,同步执行雷达、通信、电子对抗等多任务的一体化系统。
多功能电子系统采用天线收发分置的方式,通过共享发射阵列和接收阵列实现雷达、通信、电子战等多种功能的一体化,图1为多功能电子系统发射阵列和接收阵列的工作示意图,其中,发射阵列主要完成雷达、通信和电子攻击等的电磁辐射任务,而接收阵列主要完成雷达回波接收、通信信号接收以及电子侦察等任务。

图1 多功能电子系统工作示意图
为保证不同的发射阵列电子任务能够同时执行,相互又不发生干扰和影响,在多功能电子系统的设计中,并发任务的电磁兼容是必须考虑的问题。文献[4]讨论了机载设备电磁兼容产生的原因,并建立了电磁干扰的理论模型,但未探讨实现电磁兼容的具体措施。文献[5]列举了舰艇电磁兼容的相关解决途径,但其电磁兼容针对的是不同的电子系统,未考虑各系统共用天线后相互之间的电磁兼容问题。文中针对多功能电子系统发射端共用同一天线的情况,分析了任务间产生电磁干扰的原因,给出了相关的解决措施,并提出了一种基于优先级的电磁兼容调度算法,实现了多功能电子系统任务的电磁兼容性和任务有效性。
1 发射任务电磁兼容分析
多功能电子系统是共用天线的多任务同时执行的电子系统,其发射阵列的并发任务间必须同时满足3个电磁兼容条件:(1)在空域上存在共同的作用范围。(2)在频域上存在频谱的重叠。(3)在时域上存在任务执行的共同时间段。当同时满足以上3个条件时,任务之间就可能会出现同频干扰、邻道干扰等问题[6-7]。
因此,为实现发射任务间的电磁兼容性,需要采取相应的管理措施。实现电磁兼容任务调度,最根本的方法就是使每一个任务所发射的信号都是惟一或可采取某种方法进行严格区分的,使每个任务的接收机都能够将自己需要接收的信号与其它任务所产生的信号区分开来,从而达到抗干扰的目的。多功能电子系统的电磁兼容任务调度设计主要从以下3个方面考虑。
(1)空间分析。空间分离是抑制任务间电磁干扰的有效方法[8]。当若干种相互干扰的任务需要执行时,则可通过空间管理使若干个不在相同空域工作的任务同时执行。比如,一个雷达跟踪任务和一个通信任务,他们的波束在空间上没有重叠,则可以安排他们同时执行。
(2)频域分析。频谱分离是实现电磁兼容的主要方法。为降低使用时发生电磁干扰的机会,同时执行的任务频谱需设置错开。如果任务调度时出现了频谱重叠,可以利用频率自适应技术[9-10],自动寻找可用信道,将载频转换到不受干扰的频道上,从而使接收机在接收信号时不发生干扰。
(3)时域分析。时间分离是实现电磁兼容的最简单的方法。当任务无法通过空间分离和频谱分离实现电磁兼容时,可以使相互干扰的任务分时工作以保证任务顺利执行而不受影响。需要注意的是,虽然时间分离是简便的电磁兼容方式,但也是使电子设备作战效能损失最大的管理方式。
由于只需要空域、频域和时域有一个领域满足电磁波分离,任务就能顺利执行不被干扰,所以文中采用图2的电磁兼容层次管理模式,以达到实现电磁兼容的方便性和有效性。系统优先考虑空域分析,把空域相关的任务再进行频域分析,频域分析主要采用频率自适应技术,由于时间分离是作战效能损失最大的电磁兼容方式,故作为最后考虑的实现手段。
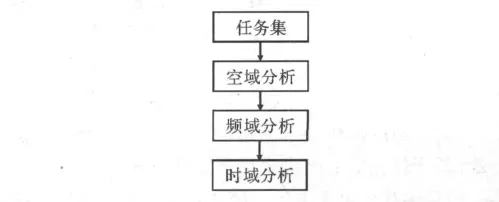
图2 多功能电子系统电磁兼容层次管理模型
2 多功能电子系统电磁兼容性调度算法
2.1 电磁兼容调度模型
在给出电磁兼容调度模型之前先作以下假设:(1)多功能电子系统提交的任务都是不可中断的,即一旦任务开始执行,中途不可中断,直至任务结束。(2)多功能电子系统提交的任务只能在其时间窗内执行,一旦超过时间窗,此任务便会丢失,无法执行。(3)每个提交的任务占用资源均小于系统资源的最大供应量。(4)多功能电子系统的资源是可重用的,即资源不会随着任务的执行而消耗,只是其可用量在各个时间段内是有限的,在任务执行结束后资源便又释放到系统资源中供其他任务调用。
多功能电子系统任务调度模型符号说明如表1所示。

表1 任务调度模型符号说明
多功能电子系统任务调度模型的数学描述为
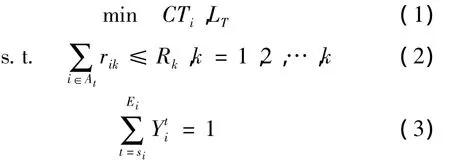
其中,式(1)是以多功能电子系统任务调度的最短执行总时间和最小任务丢失率为目标函数的表达式。式(2)是系统资源约束关系,文中考虑的资源主要是孔径资源和频谱资源约束以及电磁兼容约束。式(3)是时间窗约束关系,在满足资源约束关系的条件下,若任务不满足时间窗约束关系,则会被放入任务丢失列表,不会被调度执行。
2.2 基于优先级的电磁兼容调度算法设计
设计多功能电子系统电磁兼容调度算法需要考虑以下两个原则:
(1)优先级原则。多功能电子系统的任务有各自的一个优先级,当无法保证两个任务同时执行时,一般优先考虑优先级别高的任务。优先级的大小是根据任务的重要度、时间窗以及其他一些先验属性决定的[11-12]。
(2)时效性原则。为保证任务的时效性,每个任务都有一个时间窗,任务必须在时间窗内才能调度执行,一旦其结束时间超过时间窗截止时间,任务就会被丢弃。时间窗的大小根据任务的时效范围确定。
4.开展留守儿童的生活问题研究。经过对留守儿童的实际生活状况展开调查,明确存在的主要问题,分析出现问题的原因,采取科学化举措,让农村留守儿童可以接受平等关爱与照顾。学生管理“互助小组”应该成立并积极发挥出作用,确定留守儿童不良心理矫正方案。
基于优先级的电磁兼容调度算法的基本思想为:依据优先级和任务截止时间对任务进行排序,然后依次处理任务列表,将各个任务与可执行列表中的任务进行电磁兼容分析,分析顺序为空域、频域、时域,若满足时间窗约束则送入可执行列表并确定空域、频段、开始执行时间和结束执行时间,否则送入任务丢失列表。
空域分析时,空域会被划分成若干个扇形区域,根据多功能电子系统发射任务的特性,任务的执行空域为其中的任意多个空域单位,空域的冲突判断采用两两比较法,并用矩阵表示,一旦两个任务在任何一个扇形区域发生冲突,就视为这两个任务空域冲突,例如有4个任务,空域被分成4个区域,任务的执行区域分别为[1,2]、[1]、[4]、[1,2,3],若以 1 表示冲突,则其冲突矩阵为

频域分析时,频域会被划分成若干个频段,每个频段足够一个任务的频谱宽度,如此便可保证任务间只要不占用同一频段,就不会出现频率干扰。时域分析时,任务主要是通过在其时间窗范围内移动开始执行时间,以达到和冲突任务不同时执行的目的。
假设某时刻任务池提交了N个任务请求{Ri},i=1,2,3,…,N,图3为多功能电子系统电磁兼容调度算法流程图。
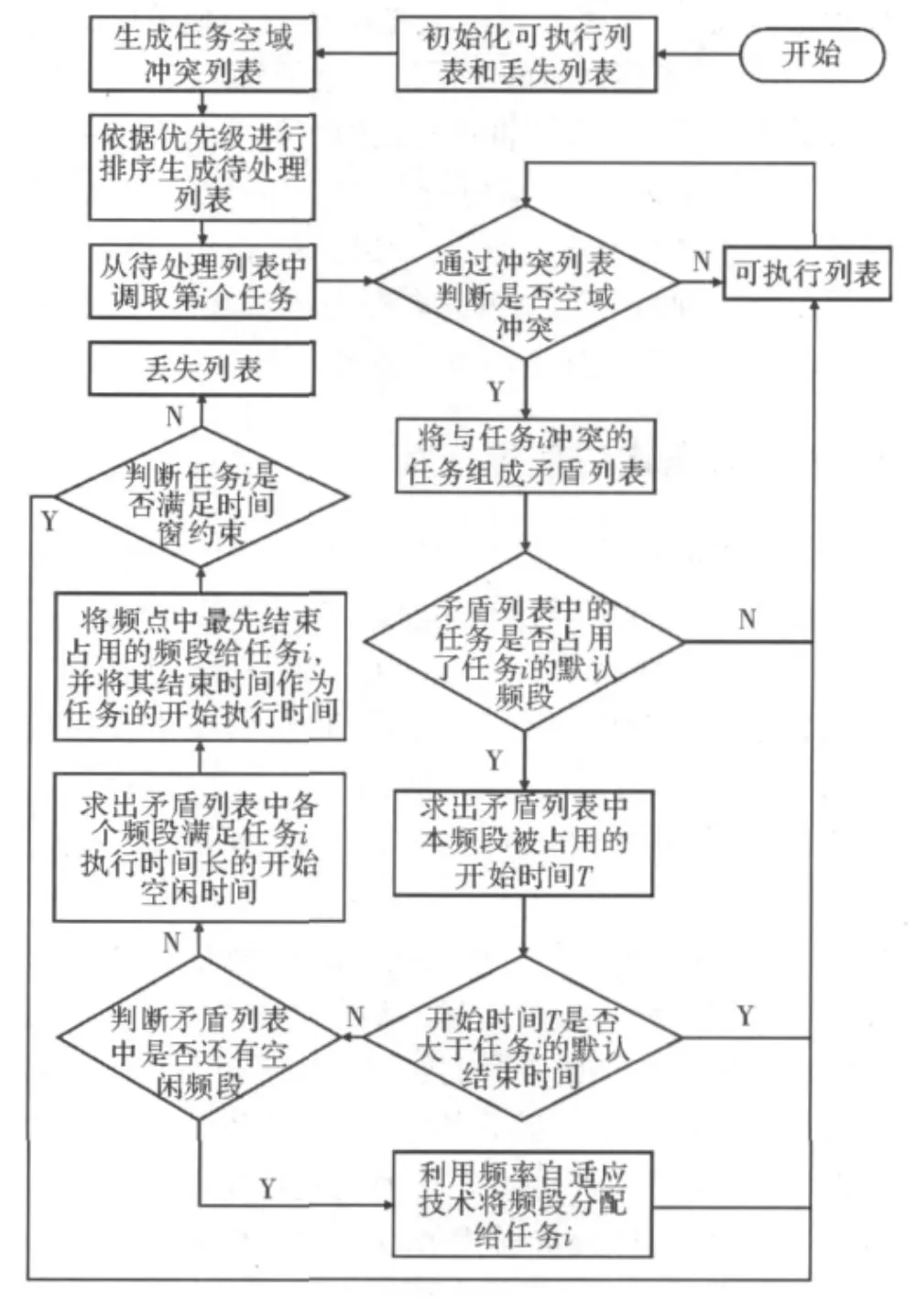
图3 多功能电子系统电磁兼容算法流程图
3 仿真分析
3.1 任务调度实例
假设某时刻任务池提交了30个任务,用1~30编号;空域划分为10个扇形区域,用1~10编号;频域划分为10个频段,用1~10编号。各任务的优先级、时间窗、执行时间、频段和空域位置均随机产生,其中优先级的范围为1~6级,时间窗的范围为30~60个时间单位,执行时间的范围为1~7个时间单位。表2给出了30个随机产生的一个任务参数对应矩阵。
输出可执行列表,如表3所示。从表2可以看出,30个任务都得到了较好的安排,从而有效地实现了任务间的电磁兼容。所有任务的结束时间为13,均满足时间窗约束,因此没有任务被丢弃。系统根据可执行列表对各任务的实际开始时间进行排序,便得到系统的执行调度列表。

表2 输入的任务列表

表3 输出的可执行任务列表
3.2 性能分析
任务结束时间和任务丢失率是在任务调度时需要关注的主要性能指标。图4和图5分别给出了上述仿真环境条件下不同任务数对任务结束时间和任务丢失率的影响。
如图4所示,随着任务数的不断增加,任务结束时间也不断上升,在任务数达到150时,结束时间出现拐点,不再增加,而趋于稳定,这是因为受到系统资源负载的作用,那些在到达时刻无法安排的任务只能延迟调度而使得任务结束时间增加,加上所有任务受到任务时间窗的限制,导致任务数达到一定量时趋于稳定,不再有大的波动。
如图5所示,当任务数<55时,任务丢失率一直为0,这说明算法充分利用了多方位多层次的电磁兼容手段,使得任务调度的电磁兼容能够很好地实现,随着任务数的增加,任务丢失率也不断上升,当任务数达到300时,任务丢失率达到了0.6。在实际应用中,可以根据不同的需要设定最佳的任务数范围。以此问题规模为例,若需要任务丢失率保持在0.1以内,任务数应保持在70以内;若需要任务冲突率保持在0.2以内,则任务数保持在100以内就可以满足要求。

3.2.2 与传统方法的任务调度结果比较
为证明文中算法在多功能电子系统任务调度中的优越性,将之与传统的任务调度算法进行比较。
传统任务调度算法的基本思想,是将任务池提交的任务,根据其优先级的大小依次添加到执行任务链表中,同步地将系统可用资源中减去每个任务所消耗的资源,对于那些由于系统资源不够而无法安排的任务,推迟其至系统资源增大时执行。在这过程中还需不断地将任务请求中超出截止期的任务删除,对于已安排的且达到其执行结束时刻的任务要释放所占用的系统资源。
图6显示了两种算法的任务结束时间情况,可以看出,任务数<150时,在任务数相同的条件下,电磁兼容调度算法的结束时间明显小于传统任务调度算法的结束时间,一般电磁兼容调度算法的结束时间要比传统任务调度算法缩短5~10个单位,这主要得益于电磁兼容调度算法充分利用空域和频域,使得在同一时刻可以安排更多的任务而不出现相互干扰。当任务数>150以后,两者的任务结束时间彼此相当,这是因为时间窗的最大范围是60,再多任务竞争也不可能超过60。因此,任务数<150时,相同数量的任务申请执行,电磁兼容调度算法可以更早地执行完毕,提高了任务执行的时间效率。就任务结束时间指标而言,电磁兼容调度算法具有一定的优越性。
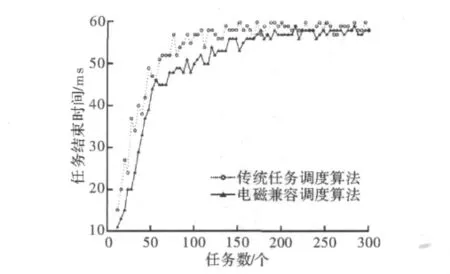
图6 两种算法的任务结束时间情况
图7显示了两种算法的任务丢失率情况,从图中可以看出,此问题规模下,传统任务调度算法的任务丢失率在任务数<25时都为0,而电磁兼容调度算法的任务丢失率在任务数<55时都为0,随着任务数的不断增加,电磁兼容调度算法的任务丢失率始终要比传统任务调度算法的任务丢失率约低于20%,这说明电磁兼容调度算法在任务丢失率方面也优于传统任务调度算法。究其原因主要是电磁兼容调度算法通过空域、频域和时域三维进行任务分配,让每一个任务尽可能提前开始执行,从而使得任务结束时刻超过时间窗的任务数量减少,任务丢失率自然也比传统任务调度的任务丢失率小,体现了其在此性能指标上的优越性。
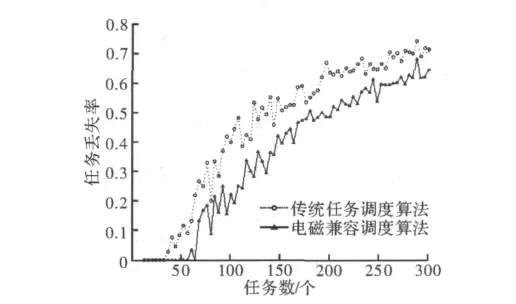
图7 两种算法的任务丢失率情况
4 结束语
多功能电子系统是为适应现代复杂作战环境提出的,多功能电子系统的研究也已成为今后所面临的重要研究领域。在多功能电子系统设计中,为保证系统能够顺利完成指定任务,电磁兼容是必须考虑的问题。文中在分析发射任务电磁兼容的基础上,提出了多功能电子系统任务调度的电磁兼容层次分析模型,并设计了基于优先级的电磁兼容调度算法,最后通过实例仿真进行了算法实现,分析了此算法下的任务结束时间和任务丢失率这两个性能指标,同时与传统的任务调度算法进行了比较分析,结果表明,设计的电磁兼容算法在解决系统任务电磁兼容问题、实现任务调度上具有一定的有效性和优越性。
[1]张明友.雷达-电子战-通信一体化概论[M].北京:国防工业出版社,2010.
[2]CHU R S,LEE K M,WANG A T S.Multi- band phased -array antenna with interleaved tapered-elements and waveguide radiators[C].Antennas and Propagation Society International Symposium,1996,21:1616 -1618.
[3]GREGORY C,TAVIK CL,HILTERBRICK C.The advanced multifunction RF concept[J].IEEE Transactions on Microwave Theory and Techniques,2005,53(3):1009 -1019.
[4]王星,郝重阳,陈游.机载雷达与对抗设备电磁兼容建模与仿真[J].火力与指挥控制,2010,35(8):103-106.
[5]李仙茂,张东屹,刘涛.舰载电磁兼容性设计与频谱管理[J].舰船电子工程,2009(3):160-163.
[6]李潮.复杂电磁环境下雷达同频干扰及对策[J].电子对抗,2011(1):45-48.
[7]孙严东,孙劭方.无线通信的电磁干扰与防范[J].科技信息,2009(8):352.
[8]沈鸿斌.无线通信空间域电磁兼容及资源利用[J].中国无线电,2004(2):13-15.
[9]尹华锐,李亚麟,符权,等.IR-UWB通信系统的准自适应频率同步算法[J].系统工程与电子技术,2009,31(7):1564-1567.
[10]LOVELACE W,TOWNSEND J.The effects of timing jitter and tracking on the performance of impulse radio[J].IEEE Journal Selected Areas Communications,2002,20(9):1646-1651.
[11]AUDSLEY N,BURNS A,RICHARDSON M,et al.Applying new scheduling theory to static priority preemptive scheduling[J].Software Engineering Jaurnal,1993,8(5):284 - 292.
[12]伍微,倪少杰,刘小汇.一种静态优先级保序饱和分配算法[J]. 计算机科学,2009,36(12):41-44.
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:22
民用飞机设计与研究(2020年1期)2020-05-21 07:24:40
制造技术与机床(2019年4期)2019-04-04 12:22:06
测控技术(2018年7期)2018-12-09 08:58:00
西南交通大学学报(2016年4期)2016-06-15 20:29:36
海峡科技与产业(2016年3期)2016-05-17 04:32:11
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:14
信息通信技术(2015年6期)2015-12-26 01:16:54
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:45
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:45