
双驱动电动推杆加载同步控制技术
2013-12-14 09:03陈东生
机床与液压 2013年10期
陈东生
( 中国工程物理研究院机械制造工艺研究所,四川绵阳621900)
如图1 所示,是一个龙门结构形式的升降机构,在该机构中,采用两个电动推杆双驱动控制机械装置进行加载,由于推杆与加载装置之间是刚性连接,系统对两个电动驱动的推杆有一个同步要求,否则机械装置会受到破坏。该升降机构对工件需施加一吨多的压力,这时候仍然必须保证升降机构的运动位置保持同步,以达到均匀施加载荷的目的。电动推杆只是一个推力装置,并不是一个定位装置,这就对该同步控制设计提出了一个难题。另外为满足设备工作位置初始化和设备校准需要,升降机构还需具有同步回零功能。
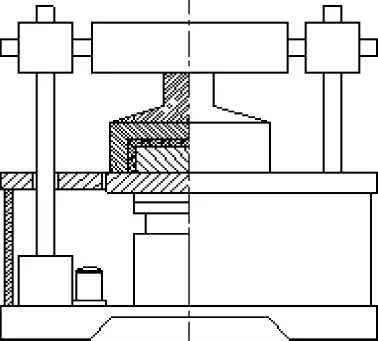
图1 升降机构简图
作者针对特定装置提出了同步控制方案,以供大家借鉴。
1 双驱动电动推杆同步控制系统硬件构架
整个硬件系统由5 个部分组成:
(1)运动控制系统。采用上下位机结构的开放式数控系统,由PC (上位机)、6K 控制器和PLC(下位机)组成。下位机6K 控制器实现如插补运算、位置控制、速度控制、多轴运动控制、操作面板开关量和运动状态的输入输出处理以及运动逻辑功能等实时性功能;PLC 主要完成电动推杆同步超差保护控制功能。
(2)驱动系统。由安川驱动器和安川电机组成。
(3)测量反馈系统。由电机编码器、减速机处编码器、电动推杆处接触式位移传感器、RS485 转RS232 通讯接口组成。电机编码器信号反馈到驱动器,构成速度环;减速机处编码器信号反馈到6K 控制器,构成位置环;电动推杆处接触式位移传感器通过RS232 将位置信号反馈到工控机。
(4)传动装置与执行机构。减速机可以提高电动推杆的输出扭矩,两个电动推杆是整个测控系统控制的最终执行机构,电动推杆将电机的旋转运动转化为推杆的直线运动。两个电动推杆之间使用刚性连接,正因为它们的刚性连接,才对同步提出了较高的要求。两个电机同步运行,并联驱动电动推杆作一个方向的直线运动。图2 为系统的控制框架。
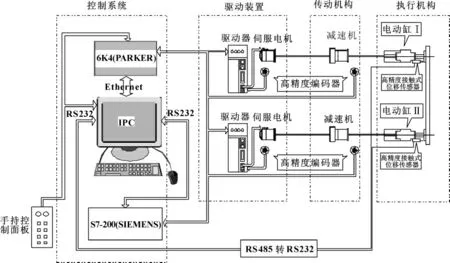
图2 测控系统构架图
2 双驱动电动推杆加载同步控制技术
两轴同步控制,顾名思义就是要两个轴的运动是一致的。该装置需要两个轴的位置要一致。要实现两轴的位置同步,必须要启动同步、停止同步、速度同步、加速度同步。
在实际设计中,有两种方法可以实现两轴的位置同步:一种是机械同步,机械同步一般不用在高精度同步控制中;另一种是电子控制同步,使用可编程的步进或伺服电机系统替代机械同步传动部分,同步轴由各自的电机驱动,两轴的速度和位置同步关系由控制器来控制。电子控制同步可以很容易改变同步轴的同步关系,并且没有齿隙和齿轮磨损等问题出现,它减少了同步机械装置,并且使用闭环或半闭环控制,提高了控制同步精度。
该系统采用电子同步控制技术,其核心是控制器的精确控制和各伺服轴的精密定位。以下是一些运用在加载中的同步控制方法,实际运行时非常有效,其同步精度可控制在10 μm。
(1)机械结构优化
该系统执行机构是电动推杆,由于电动推杆没有很好的导向,即使有导向,其导向精度也不会太高,另外在推杆推出一定行程后,它就成为一个悬臂机构了。文中要求的同步控制目的:①保证在加载时两个杆同时受力不至于机械受损;②解决两个杆不平衡会导致加载压力不均匀的问题。
由此,加载时的同步控制必须要考虑到机械机构,主要是推杆要有一定的刚性,要足够粗,在给定的加载压力下弯曲要非常小;另外,需要设计装配保证两个推杆之间具有良好的平行度、推杆与加载机构之间具有较好的垂直度。另外必须考虑由于升降杆不同步导致的横梁破坏问题,在横梁和升降杆的连接部位,可通过增加一个刚度极大的弹性元件,同时横梁和两个升降杆的连接采用销钉连接,销钉的断裂强度要比横梁与基座的强度小得多。
(2)直线插补同步控制技术
6K 是开环方式的轮廓控制系统,运动控制器采用直线插补的二轴联动功能来实现两个电动推杆驱动电机的同步控制。联动工作方式不仅对于所驱动的轴发出同步动作脉冲,而且在每个伺服周期对联动轴的位置、速度反馈信息进行比较判别,并随时校正同步误差。
采用45°直线插补方式驱动升降机构的两个伺服电机,实现两个轴的位置同步控制,这时候的同步误差为两个轴的定位精度之和。
(3)提高单推杆的控制精度
要提高同步精度,必须要提高单轴的运动控制精度,这样就可以通过控制两个推杆的控制信号的同步来实现最终的位置同步。
由于电动推杆的结构限制,无法安装直线光栅尺,故无法检测运动最终位置,不能采用全闭环控制。通过采用双编码器半闭环控制方式,可以提高电动推杆的控制精度。定位精度主要受滚珠、丝杠的精度(导程精度、轴向游隙影响)、机械安装、机械传动精度、控制方式的影响较大。提高滚珠丝杠的精度可以采用高精度滚珠丝杠。机械传动误差主要由电机与减速器之间传动、同步带传动引起,故在滚珠丝杠输入端增加圆盘编码器,将滚珠丝杠输入端的位置反馈到控制器,而电机编码器位置反馈到驱动器,从而消除部分机械传动误差。
该系统是一个标准的双半闭环系统,图3 是伺服系统控制原理图,其速度反馈来自于电机编码器,而位置反馈来自于减速器末端的圆光栅反馈。内环是速度环,外环是位置环。通过位置控制,可以消除减速器前端的机械误差。

图3 单电动推杆伺服系统控制结构图
(4)电动推杆同步超差三重冗余软件保护控制
当一个轴由于某种原因运动过慢或者过快甚至停止运动时,两个轴的位置同步超差就会很大,特别是在一个轴异常停止运动时,甚至会导致升降机构的破坏。运动中为防止两个电动推杆出现同步超差,提高控制的可靠性,设计了三重保护监控,防止错位过大导致设备损坏。
第一重是上位软件同步误差监控。在上位软件中,设置了一个同步误差监控线程,对两个电动推杆圆盘编码器的值(同步轴的位置)进行采样比较,如果发现位置同步误差超过设定值,则发出运动停止命令,运动停止后,根据两个升降杆的位置偏差进行自动调整。这种方法由于软件的滞后性导致停止后同步误差偏大。
第二重是运动控制器同步误差监控。6K 运动控制属于智能设备,本身作为一个独立系统运行,该系统给用户提供了基于“循环调度+ 中断检测方式的多任务”调度算法。为了提高系统的安全性和可靠性,在6K 运动控制器中也设计了同步监控和超差保护程序,工作机制和工控机的程序相同,但实时性仅能限于一个插补周期之内。
第三重是用PLC 同步误差控制。PLC 中高速计数模块对两个电动推杆的外部编码器值进行实时比较,超过设定误差时通过PLC 的输出口输出信号接通继电器线圈,立即停止两个电动推杆运动。它与运动控制系统是独立的,即便运动控制系统出现故障,它依然能起到保护作用。
(5)电动推杆同步超差硬件保护控制
作者在软件上针对这两个轴进行了一系列的同步设计,但为了获得更高的装置安全性,在硬件逻辑电路控制中,增加了安全性设计。如图4,KM1 和KM2分别控制两个电动推杆驱动器主电源,但对控制电源不控制。这个电路正常工作时,如果任何一个电动推杆限位信号触发、任何一个电动推杆的驱动器报警、上位软件同步超差报警、PLC 同步监控超差报警、急停信号触发,KM3 和KM4 将同时断开,同时切断两个电机的制动器。

图4 硬件保护控制电路图
3 回零时的双驱动同步控制技术
设备绝对零点在运动控制中起着非常重要的作用,为了对运动控制的坐标系进行校准,每次启动前都要进行一次回零操作。采用联动控制电动推杆同步存在一个回零的问题。从6K 控制器常用的回零方式上来看,对单轴而言,电机一接到回零的命令,便开始寻找零位信号,在接到零位触发信号后,马上记录当前位置,开始减速并回退到触发信号处,但对于走插补运动的两个缸来讲,不可能同时按照单轴的方式回零,一是控制器不支持,二是零位触发不可能安装得让两个缸同时触发,否则就会出现两个缸的不同步。这是回零同步控制面临的难题。对于刚性连接的电动推杆的回零可以有几种方式来完成:
(1)用“软”零位方式,即软件上定义一个理论零点,每次回零就插补运动到该位置。这种方式在长时间运行后,两个缸会产生积累误差。
(2)先用插补方式回到一个接近零位的坐标,然后用跟随方式来回零。所谓跟随方式就是一个主运动,一个从运动,从运动根随主运动,主运动单轴回零。这种方式在长时间运行后,两个缸仍会产生积累误差,只是要小于“软”零位方式。
(3)使用绝对零位方式。该方式同时使用高精度接触式位移传感器和非接触零位传感器,在两个电动推杆的底部安装高精度接触式位移传感器,在两个接触式位移传感器可检测位置设定一个位置为零位,将该位置接触式位移传感器的读数置为零,回零运动分三部分:第一步,让电动推杆以第一种方式回零,根据当前位置采用45°直线插补命令进行逻辑回零,以确保大行程范围的同步控制要求,记下主运动轴对应的接触式位移传感器的数值V1;第二步,两个缸直线插补运动-V1值到绝对零位处,记录下从运动轴对应的接触式位移传感器的数值V2;第三步,从运动轴单轴调整-V2值,最后两个缸对应的接触式位移传感器的数值都为零。这样就完成了整个绝对回零调整。
在实际运行中作者采用混合回零方式,它是最为优化、精度最高的回零方式。最终的回零精度达到了1 μm。
4 结论
电动推杆的同步控制设计方案在实际运用中获得了很好的效果。
(1)采用双编码器半闭环控制方式,大大提高了电动推杆的位置控制精度。
(2)两个电动推杆的回零采用混合绝对回零方式在工程中是可行并有效的。
(3)为防止两个电动推杆出现同步超差,使用三重冗余软件和硬件同时控制,提高了电动推杆同步控制的可靠性。
【1】赵运龙.数控机床及运用[M].北京:机械工业出版社,2002.
【2】Parker-Hannifin.Multi-Axis Synchronization[M].
【3】Parker Hannifin Corporation. 6K Series Command Reference[M].
猜你喜欢
现代机械(2021年3期)2021-07-12
客车技术与研究(2019年5期)2019-10-24
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
中国核电(2017年1期)2017-05-17
制造技术与机床(2017年2期)2017-05-04
舰船科学技术(2015年8期)2015-02-27
电子设计工程(2015年3期)2015-02-27
决策与信息(2014年21期)2014-12-13
航天返回与遥感(2014年5期)2014-07-31
