
CIPT模糊恒压控制策略设计与分析
2013-12-14 07:39:46杨光唐厚君白亮宇
电气自动化 2013年4期
杨光,唐厚君,白亮宇
(上海交通大学 电子信息与电气工程学院,上海 200240)
0 引言
模糊控制最大的优点是不依赖于被控对象精确数学模型,能够克服非线性参数的影响,对调节对象的参数变化具有较强的鲁棒性。而对于具有松耦合变压器的非接触电能传输系统,原副边磁性机构没有任何电气连接,通过互感耦合传输电能。在非接触电能传输系统运行过程中,原副边磁机构距离难免会受外界影响而变化,进而影响到互感值;负载切换与扰动也会影响到系统输出电压,而对于电动汽车充电系统,电压的稳定是非常重要与关键的。由于非接触电能传输系统的非线性、时变性以及不确定性,很难建立精确的数学模型,而传统的PID控制对对象传递函数模型及参数有很强的依赖性。因此,本文提出了采用模糊控制的算法,解决了由于CIPT系统磁机构距离和负载变化导致输出电压变化的问题,使系统输出电压恒定。同时又克服了传统PID控制对数学模型的依赖。最后对基于模糊控制算法的系统进行了仿真和试验。
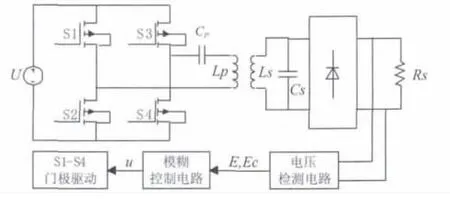
图1 基于模糊控制的CIPT系统原理图
图2 是初级H桥4个开关的 PWM控制信号[5]。在周期 T不变的情况下,通过改变占空比α的大小来调节次级回路的输出电压值。
1 原理分析
基于模糊控制策略[1]的CIPT系统[2]结构如图1所示。控制系统由CIPT主电路、直流输出电压检测电路、模糊控制电路、PWM调制器[3]、驱动放大电路等组成。模糊控制器与模糊算法、PWM调制算法等由 TMS320F2812型 DSP[4]中央处理器为核心的控制器构成。
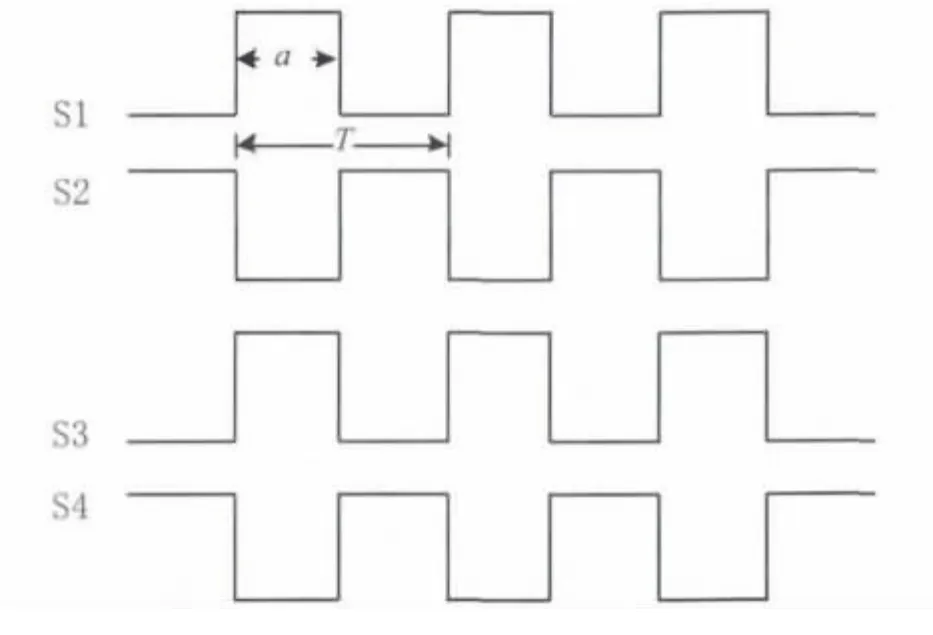
图2 PWM控制信号
如图 3所示,周期T不变,当占空比α=0.5 T时,次级回路的输出电压值最高。当α趋向0或者 T时,次级回路的输出电压值逐渐降至0伏。
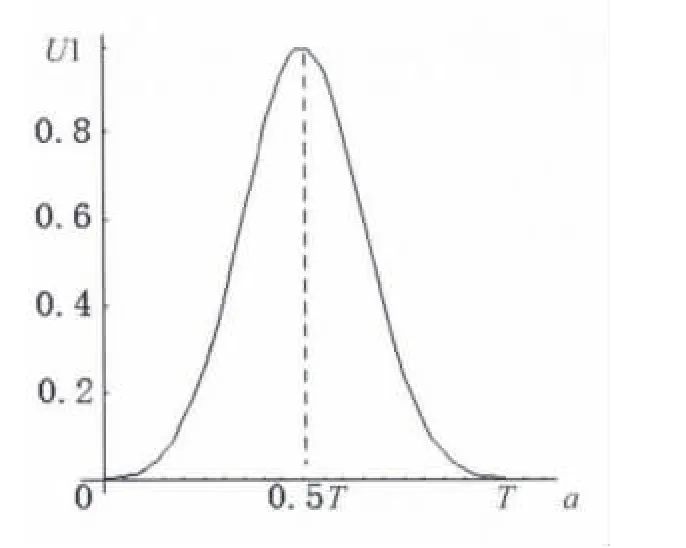
图3 占空比和次级回路输出电压的关系
2 模糊控制方法
模糊控制是以模糊数学[6]为基础,以模糊集理论、模糊语言变量和模糊逻辑推理为基础,以模糊集合表示变量,由模糊逻辑运算进行推理判决的一种智能控制方法[7]。模糊控制系统的是模糊控制器,由以下三部分组成:
① 模糊化 利用口语化变量来描述测量到的电压偏差[8]。
② 模糊推理 根据模糊控制规则库,应用模糊推理方法得到模糊控制器的模糊输出值。
③ 解模糊化 将模糊输出值转化为可以直接作用于控制对象的精确控制量。
常规模糊控制器总是选用被控对象的输出变量的偏差值e和偏差变化率de作为输入变量,而把解模糊化得到的精确控制量作为输出。在本章中,控制系统通过实时采集CIPT系统的直流输出电压u0(k),由式(1)获得第k个采样周期的直流输出电压误差量e(k)及相应的误差微分量de(k)。

设输出电压误差量为 e,误差变化率为 de,输出控制量为 u。将 e,de,u 量化为五个语言值:反向大(NB),反向小(NS),零(ZO),正向小(PS),正向大(PB)。e的模糊集为{PB,ZO,NB},de的模糊集为{PB,ZO,NB},u 的模糊集为{PB,NS,ZO,PS,NB}。专家知识的推理规则为:IF(e=第一列中相应元素,de=第一行中相应元素),THEN(u=表格中对应元素)
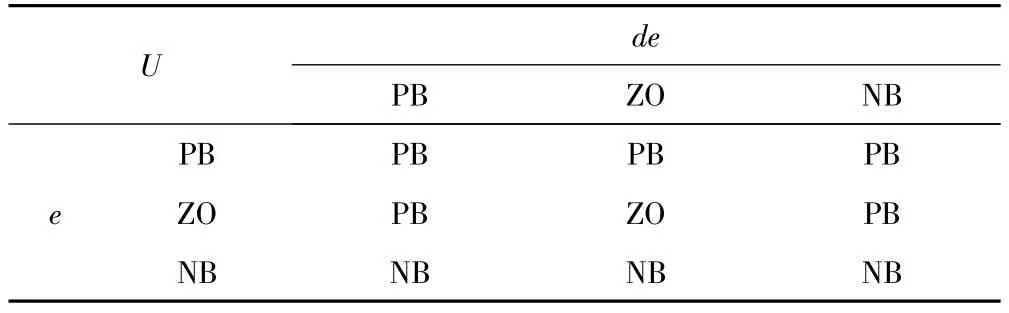
表1 模糊推理规则表
采用三角形模糊集合作为隶属度函数,误差e,误差变化率de和输出控制量为u的输入隶属函数分别如图4和图5所示。
当e·de<0或e=0且de≠0时,即 ZO时,模糊控制器处于保持控制模态,即u(e,de)=u0,维持占空比不变;
当e·de>0时,根据误差e的大小进行相应的模糊控制,使得误差e→0,及达到恒压控制的目的。


基于上述思路,接下来介绍解模糊化的方法。假设,eL为保持阶段与微调阶段边界值,eH为微调阶段与粗调阶段边界值,eM为模糊控制器可以调节的最大误差,u0为模糊控制器前一状态输出。
(1)保持阶段


(3)粗调阶段

其中α为比例系数。
由于不同工况下,系统的电气特性不同,对系统调节时间的要求也不同,因此上述各边界值及系数值,要根据设计者的经验反复调节设定。
3 实验结果
图6和图8为原副边磁机构从10 mm突变到5 mm时,输出电压波形和原边回路电流。图7和图9为原副边磁机构从5 mm突变到10 mm时,输出电压波形和原边回路电流。

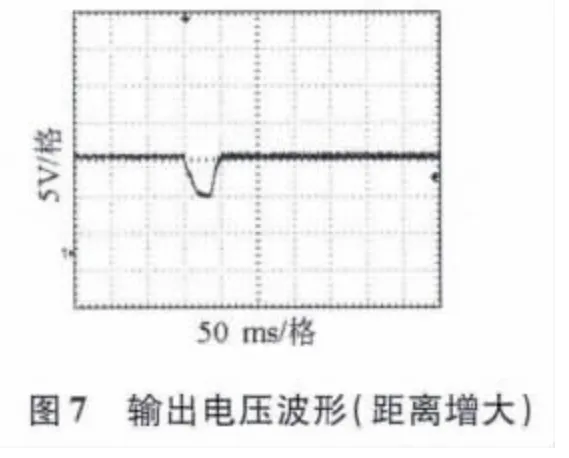
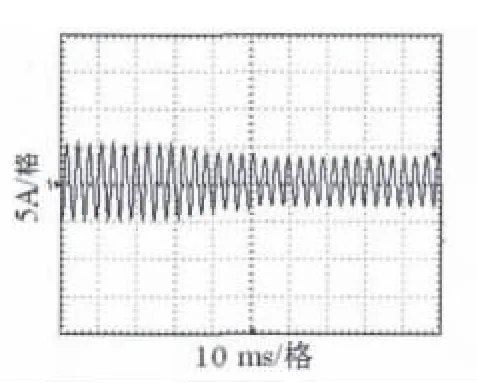
图8 原边回路电流波形(距离减小)
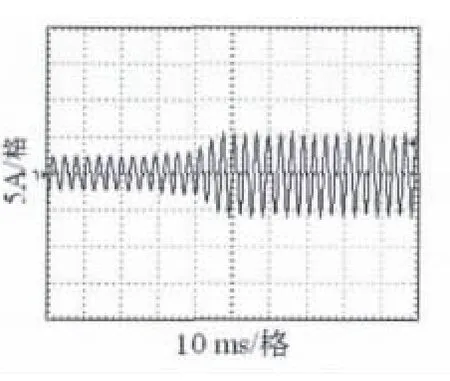
图9 原边回路电流波形(距离增大)
4 结束语
从实验波形可以看出,在原副边耦合磁机构距离从10 mm突变5 mm过程中,输出电压经历了5 V的超调过程,经历了40 ms的调节过程进入稳态;在原副边耦合磁机构距离从5 mm突变10 mm过程中,输出电压经历了5 V的超调过程,经过50 ms进入稳态。在两次耦合距离突变过程中,输出电压均被控制到给定电压12 V,稳态精度控制在0.3 V以内。由以上分析可知,基于模糊控制的恒压调节策略,可以在磁机构距离突变的条件下,达到恒压的目的。实验验证了该控制策略的有效性和理论分析的正确性。
[1]李劲松,凌敏.模糊控制的现状及发展.铜仁职业技术学院[J].铜仁职业技术学院学报(自然科学版),2010,8(5):39-42.
[2]赵志斌,孙跃.电压型CPT系统动态负载恒压输出研究[J].中科技大学学报(自然科学版),2011,35(9):66 -71.
[3]赵富强,刘永强.基于DSP的任意波形PWM调制技术[J].微计算机信息,2007,24(20):141 -142.
[4]苏奎峰,吕强.TMS320F2812原理与开发[M].北京.电子工业出版社,2006.
[5]孙晶,凌云峰.PWM脉宽调制方向研究[J].技术与市场,2011,32(7):78.
[6]张曾科.模糊数学在自动化技术中要应用[M].北京.清华大学出版社,1997.
[7]怯肇乾,宋现超.嵌入式模糊智能控制系统设计[J].计算机与数字工程,2009,37(6):167 -171.
[8]周志久,吴灿.基于 DSP的数据采集系统设计与实现[J].航天控制,2011,29(2):65-68.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
装备制造技术(2021年2期)2021-07-21 05:38:56
数学大世界(2021年4期)2021-03-30 00:44:24
现代装饰(2020年7期)2020-07-27 01:27:50
运筹与管理(2019年10期)2019-12-17 06:07:12
华中师范大学学报(自然科学版)(2016年1期)2016-11-30 03:42:14
通信电源技术(2016年5期)2016-03-22 01:09:57
佳木斯大学学报(自然科学版)(2014年4期)2014-07-09 01:59:58
河南科技(2014年11期)2014-02-27 14:09:59
河南科技(2014年3期)2014-02-27 14:05:52
