自由测站法在高速铁路CPIII平面网测量中的应用
2013-12-06 08:59龚循强李威俊周秀芳
测绘工程 2013年6期
龚循强,李威俊,周秀芳
(1.西南交通大学 地球科学与环境工程学院,四川 成都 610031;2.浙江省第七地质大队,浙江 丽水 323000;3.四川农业大学 经济管理学院,四川 成都 611130)
德国是建设高速铁路最早的国家之一。德国睿铁公司(Rail One)执行副总裁巴哈曼先生在总结无砟轨道铁路建设经验时说:要成功地建设高速铁路,就必须有一套完整、高效且非常精确的测量系统[1]。这说明精密工程测量在无砟轨道工程建设中的重要作用。铁道部在2008年铁建设[2008]246号“关于进一步加强客运专线建设质量管理的指导意见”文件中,也明确指出精密测量、沉降控制、无砟轨道、四电集成是高速铁路建设中的4大关键环节。而CPIII平面网测量正是高速铁路精密测量的核心技术之一。
常规的控制测量中,全站仪一般架设在一个控制点上向其他控制点上的棱镜进行方向和距离测量,距离必须进行往返观测,通过已知边提供的起算数据解算出待定点的坐标[2]。而CPIII平面网是一个标准的带状控制网,其测量标志一般埋设于线路两侧的接触网杆基础、桥梁固定支座端的防撞墙、隧道边墙或排水沟上,其距离难以进行往返观测。因此,CPIII平面网的网型特点,决定了CPIII平面网测量用常规的测量方法不能实现。为了建立高精度的CPIII平面网,我国目前通常采用的是从德国引进的自由测站法。该方法不仅具有无需在CPIII点上设站的优势,而且观测时不需要定向。为使科研和工程技术人员能够全面地认识自由测站法在高速铁路CPIII平面网测量中的应用,本文将阐述自由测站法建立CPIII平面网的原理,并介绍该方法在进行某高速铁路CPIII平面网建网中的成功案例。
1 由测站法建立CPIII平面网
1.1 自由测站CPIII平面网的测量原理
自由测站法是以一测站为一独立坐标系,不同的观测站具有不同的测站坐标系。在自由测站观测之后,将各测站坐标系转换至相同的坐标系。故施测时可以任意点为测站,任意方向为北方向,观测测站附近各点的水平方向和距离,将观测数据通过软件进行处理。它采用智能型全站仪进行方向和距离的自动观测,通过网型中涵盖的CPI和CPII点(CPIII控制网的上级控制点)来确定自由测站点坐标,经过平差计算,从而解算出各个CPIII点的坐标。
在采用自由测站法对CPIII平面网进行观测时,将全站仪置于线路中线附近的适当位置,采用自由测站边角交会法向线路两侧多对CPIII点上的棱镜进行方向和距离测量,并应联测附近的CPI和CPII点,以获取CPIII点坐标[3]。如图1所示,全站仪在CPIII点号为9、11和10、12的大致中间Z4自由测站,在5至16号CPIII点上及其邻近的CPII-1点上安装棱镜,选择零方向,假设以5号点为零方向,然后按全圆方向法观测[4],依次向5、7、9、11、13、15、16、14、12、CPII-1、10、8、6、5点上的棱镜观测水平方向值、斜距和竖直角,要求根据全站仪的标称精度进行多测回的自动观测。

图1 CPIII平面网的测量方法及其控制网网形示意图
CPIII点的纵向间距一般约60m,最小不得小于40m,最大不得大于80m;自由测站的间距一般约120m,每个自由测站一般观测12个CPIII点,每个CPIII点均被3个自由测站对其进行方向、斜距和竖直角交会[5]。
由于CPIII控制网精度要求高,每个控制点与相邻5个控制点的相对点位中误差均要求小于1mm[6],故需对测站到CPIII控制点的最远距离控制在180m以内,至最远的CPI或CPII点的距离控制在300m以内。
1.2 CPIII平面网的平差计算及精度评定
CPⅢ平面网是随着我国无砟轨道的建设从德国引进的,是一种全新的测量网形。它是一个标准的带状控制网,且未在已知点上设站观测,与常规测量控制网完全不同。因此,常规方法无法正确推算CPⅢ点的近似坐标。所以,要实现CPⅢ平面网的平差计算和精度评定,关键在于实现CPIII平面网中未知点近似坐标的正确计算,当前采用的是分区无定向近似坐标计算方法[7]。分区无定向近似坐标算法是对常规无定向概略坐标算法的一种改进,该方法计算的近似坐标与其真值偏差较小,特别适用于CPIII平面网点近似坐标的计算。其基本思路为:
1)以测站为单位,令CPIII自由测站边角交会网第一个测站点的坐标为(0,0),第一个测站点到其观测的第一个CPIII点的坐标方位角为0,定义假定CPIII网坐标系;
2)按极坐标计算方法或自由测站坐标计算方法计算各点的坐标。当计算的坐标中,有一定数量的CPII点时,则采用四参数坐标转换的方法将已推算的CPⅢ点和测站点的坐标转换到以CPII点为基准的坐标系中;
3)令下一个测站的测站点坐标为(0,0),该测站点到其观测的第一个CPIII点的方位角为0,重复上述2)、3)过程,则可完成全部CPIII点和测站点近似坐标的计算。
分区无定向CPIII平面网近似坐标算法主要由极坐标计算、自由测站坐标计算、四参数坐标转换3部分组成。
为了完成对图1所示的CPIII平面网进行平差计算,可对自由测站至各CPI、CPII及CPIII点的水平方向和水平距离观测值开列误差方程。
假定水平方向观测值L及其改正数vL,与待定点近似坐标X0,Y0及其近似坐标改正量dx、dy之间的关系如式(1)所示。

将式(1)按泰勒公式展开,并仅取至一次项,得水平方向误差方程为


式 中:r=206 265″,近 似 坐 标 方 位 角,测站I上整组方向的定向角未知数
假定CPIII网中水平距离观测值S及其改正数vS,与网中待定点近似坐标X0,Y0及其近似坐标改正量dx、dy之间的关系为

式(3)按泰勒公式展开,并仅取至一次项,便得水平距离误差方程为

式中:近似水平距离

若测点j为CPI或CPII点,则式(2)和式(3)中的近似坐标改正量dxj、dyj为0,即该点为已知点。
由于CPIII平面网中包括水平方向和水平距离两类独立不相关的观测量,要对不同类观测值统一进行间接平差,不仅需要建立同类观测值的权比关系,而且需要建立这两类观测值间的权比关系。一般可按照经验定权法确定两类观测值的权比关系,具体定权方式如下:
以水平方向观测值的中误差sL为单位权中误差,即s0=sL,那么水平方向和水平距离观测值的初始权即为

式中:a,b为距离测量的固定和比例误差,S为自由测站点到目标点的水平距离,sL为水平方向测量中误差,sS为水平距离测量中误差。
根据水平方向误差方程式(2)和水平距离误差方程式(4),可列出观测量误差方程式的系数矩阵B;如式(5)所示,根据水平方向和水平距离观测值的权,可组成水平方向和水平距离观测值的权矩阵P。这样误差方程式(2)和式(4),可写成矩阵形式为

根据间接平差原理[8],可得CPIII点坐标未知数的平差值dX及其协因数阵。

这样,CPIII点位X和Y方向坐标中误差及其点位中误差可按式(9)计算

衡量CPIII平面网最主要的精度指标,是相邻CPⅢ点之间的相对点位中误差。设两相邻CPIII点Pi,Pj,这两点的相对位置可通过坐标差来表示,即

对式(10),根据协因数传播律可得

因此,相邻CPIII点之间X,Y方向的点位中误差及其相对点位中误差为
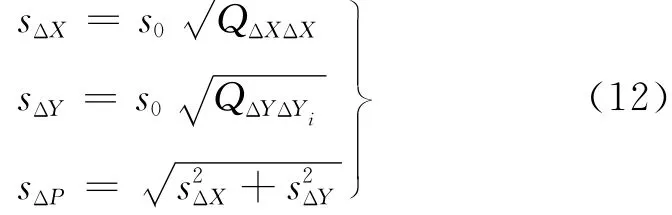
根据《高速铁路工程测量规范》[9],一个合格的CPIII平面网,要求其所有相邻CPIII点之间的相对点位中误差sΔP均小于1mm。
2 工程实例
某高速铁路土建工程六标段,工程起点常州东特大桥,终点上海虹桥站,全线长度153.745km,铺轨里程155.435km。为保证CPIII平面网的平顺性,全线统一建网,建网长度156.732km。全网采用智能型全站仪测量,边长气象改正在仪器里自动进行(气压和温度通过实地测量输入),通过仪器搭载的CPIII测量软件,采用自由测站法对CPIII平面网进行自动测量。在观测数据采集完毕后,通过平差软件对其进行平差计算和精度评定。
为满足列车高速行驶时的安全性和舒适性,要求高速铁路必须具有极高的精确性和平顺性[10],这就要求CPIII的精度必须满足毫米级的要求,以便为调轨及维护工作提供可靠的依据。在CPIII平面网测量中,要求方向观测中误差sL不大于1.8″,点位中误差sP不大于2.0mm,距离观测中误差sS以及相邻点相对中误差sΔP均不大于1.0mm。其中相邻点相对中误差sΔP是保证全网高平顺性最关键的精度指标[11]。
在进行水平方向观测时,要求各项限差不应超过表1的规定。

表1 CPIII平面网水平方向观测技术要求
距离观测应与水平方向观测同步进行,并由智能型全站仪自动进行,且满足表2精度要求。

表2 CPIII平面网距离观测技术要求
在进行CPⅢ平面网数据处理时,其平差后的精度应满足表3的规定。

表3 CPIII平面网主要技术指标
为了验证自由测站法在高速铁路CPIII平面网中应用的可行性,该工程采用标称精度1″、1mm+2ppm的智能型全站仪对CPIII平面网进行观测。观测数据经过处理后,得到的CPIII点间方位角、边长及其精度如表4所示。
从表4可以看出,距离观测中误差sS均小于0.7mm,故距离观测精度完全能够满足表3要求。而方位角观测中误差sA虽然均在1.8″之内,但仍有一小部分CPIII点间方位角中误差达到1.78″,非常接近限差。因此,在进行CPIII平面网观测时,若采用更高级别的仪器或增加测回数等方法,对数据的精度将会有所提高。

表4 CPIII点间方位角、边长及其精度
CPIII平面网点位坐标及其精度如表5所示。
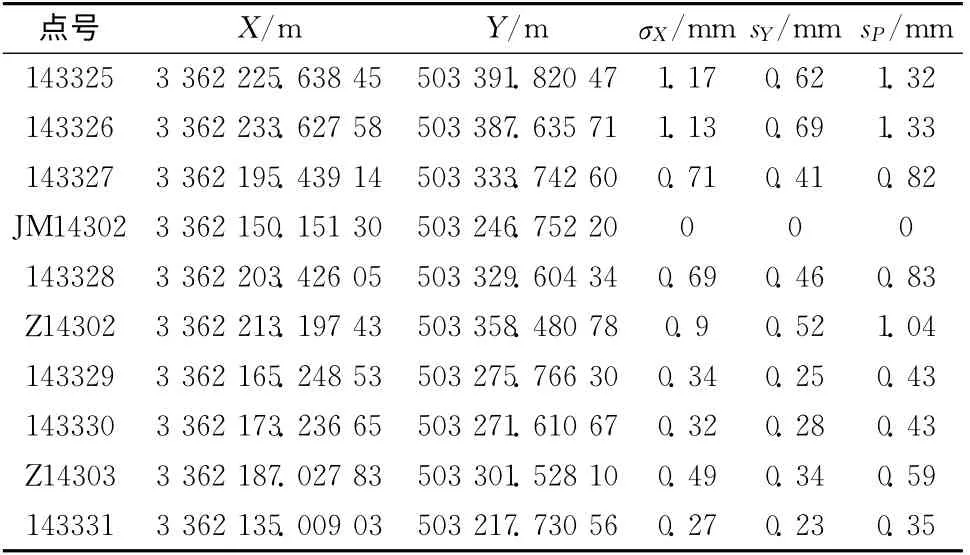
表5 CPIII平面网点位坐标及其精度
根据表5数据,CPIII点和自由测站点的点位中误差sP均在2mm内,符合CPIII平面网的精度要求。而JM14302点作为比CPIII高等级的CPI或CPII点,在平差过程中将其作为已知点,故该点X和Y方向坐标中误差及其点位中误差均为零。从表4知,CPIII平面网所有相邻CPIII点之间的相对点位中误差sΔP均小于1mm。因此,自由测站法应用于高速铁路CPIII平面网测量是可行的。
3 结 论
本文通过对自由测站法建立CPIII平面网的研究,并结合高速铁路工程案例的分析,得出如下结论:
1)采用自由测站法,测量距离短,网型繁杂,每个点的测量次数多,工作量十分庞大,要求测量人员必须十分仔细。
2)采用自由测站法进行CPIII平面网测量得到的点位相对精度高,具有很好的平顺性,能满足高精度的铺轨要求。
3)CPIII平面网测量完成后,对于CPIII的测量仪器及测量方法还需要进一步的研究。
4)采用标称精度1″、1mm+2ppm及以上精度的高等级智能型全站仪,用自由测站法进行观测,可以满足CPIII的精度要求,如果在测量中增加测回数或测站数等方式,可进一步提高点位精度。
[1]周建伟,何跃宝.高速铁路CPIII控制网初探[A].岑敏仪.高速铁路精密测量理论及测绘新技术应用国际学术研讨会论文集[C].成都:西南交通大学出版社,2009:93-101.
[2]潘正风,程效军,成枢,等.数字测图原理与方法[M].2版.武汉:武汉大学出版社,2009.
[3]杨雪峰,刘成龙,罗雁文.基于自由测站的基坑水平位移监测方法探讨[J].测绘科学,2011,36(5):153-154,192.
[4]孔祥元,郭际明.控制测量学(上册)[M].3版.武汉:武汉大学出版社,2006.
[5]付建斌,刘成龙,卢建康,等.基于自由测站的高速铁路CPIII高程控制网建网方法研究[J].铁道工程学报,2010(11):32-37.
[6]马文静,刘宏江.CPIII平面网的解算方法研究及仿真计算[J].铁道勘察,2009(1):18-21.
[7]王鹏,刘成龙,杨希.无碴轨道CPó自由设站边角交会网平差概略坐标计算方法研究[J].铁道勘察,2008(3):26-29.
[8]武汉大学测绘学院测量平差学科组.误差理论与测量平差基础[M].2版.武汉:武汉大学出版社,2009.
[9]中铁二院工程集团有限责任公司.TB10601-2009,高速铁路工程测量规范[S].北京:中国铁道出版社,2009.
[10]程昂,刘成龙,徐小左.CPIII平面网必要点位精度的研究[J].铁道工程学报,2009(1):44-48.
[11]谢辉,汪君.高速铁路无砟轨道控制网(CPIII)平面技术测量[J].科技信息,2011(3):50,9.
猜你喜欢
地理空间信息(2022年11期)2022-11-26
高速铁路技术(2022年2期)2022-05-05
高速铁路技术(2022年1期)2022-03-17
中学生数理化·高三版(2019年1期)2019-07-03
测绘学报(2018年10期)2018-10-26
城市勘测(2018年1期)2018-03-15
试题与研究·高考数学(2016年1期)2016-10-13
铁道通信信号(2016年2期)2016-06-01
肇庆学院学报(2016年5期)2016-03-11
河南科技(2015年2期)2015-02-27