连杆机构在五官科治疗椅中的应用
2013-12-05 09:37:34张意彬程云章
中国医疗器械杂志 2013年5期
【作 者】张意彬,程云章
1 上海理工大学,上海市,200093
2 上海医疗器械高等专科学校,上海市,200093
0 引言
五官科治疗椅是耳鼻喉科室的重要治疗设备,见图1。它可以根据治疗的需要,随时改变治疗体位的变化。目前,国内医院大多配备欧美产品,由于欧美人群身高较长,平均180 cm,治疗椅最小高度(Height_min)一般在558 mm(22 inch)左右,对于国人,平均身高170 cm,并不适合,因此适当降低座椅的最小高度,更加符合我国的实际使用情况。

图1 五官科治疗椅Fig.1 Otolaryngology chair
1 五官科治疗椅的参数确定
根据五官科医生检查的需要,五官科可治疗椅必须能够完成三个基本动作,即升降动作,靠背弯折动作和座椅旋转动作。座椅升降和靠背弯折采用电动控制,旋转动作由人工推动控制。具体要求为:(1)治疗椅最小高度(Height_min)为450 mm,最大高度(Height_max)为650 mm;(2)治疗椅靠背弯折角度最小为110o,最大角度为175o;(3)治疗椅旋转范围为0o~340o,且带有刹车机构。
经调研发现,市场上大多五官科治疗椅采用液压机构完成以上三种动作的调整,液压传动机构有一定的优点:输出大的推力或大转矩、无极调速、传动稳定和过载保护等。但同时也存在诸多缺点:成本较高、维护繁琐和油污污染等。
电动推杆(Linear Actuator),又称推杆电机,见图2。它可以实现往复式运动,具有运动平稳、维护方便、无污染、断电自锁、位置记忆等优点,在近些年的发展中,技术日渐成熟可靠。其具体机械性能参数可参看表1。利用电动推杆组成的连杆传动机构,既可以大幅降低生产和维护成本,又解决了液压传动机构的油污污染问题。
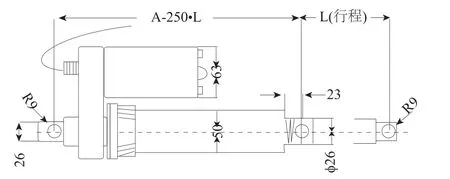
图2 电动推杆Fig.2 Electric linear actuator
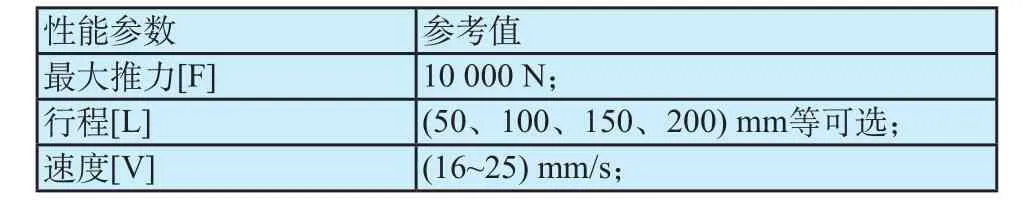
表1 电动推杆机械性能参数表Tab.1 Mechanical performance parameters of electric linear actuator
2 升降机构设计
连杆机构[1]由于采用低副,接触面积大、承载重、便于润滑、不易磨损,形状简单、易于加工、容易获得较高的加工精度,所以广泛应用于工业、汽车、医疗器械等制造领域。
连杆机构的设计方法主要有两种 ,即解析法和作图法[2]。在此次设计过程中我们采用作图法,利用CATIA 的草图功能,添加尺寸和行为约束,完成原理图设计,见图3。
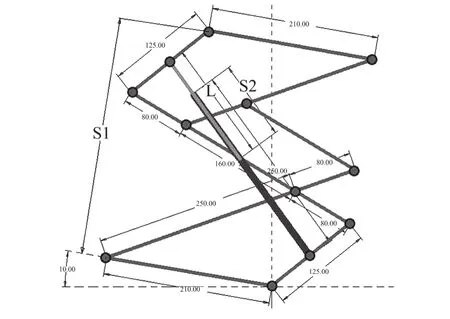
图3 原理图设计Fig.3 Schematic design
治疗椅行程S1=Height_max-Height_min=200 mm,经过原理图仿真分析,确定电动推杆的行程S2=120 mm。参照表1,选择较为合适的电动推杆(L=150 mm)。在完成整个连杆机构原理图设计之后,采用自顶向下[3]的设计思路,结合力学分析,逐一完成各个零部件的单体设计。最后,完成整个设备的组装,构建虚拟电子样机。零部件的组装要遵循实际装配原则,使用真实约束[4],在此机构中,主要使用铰链约束(11个)和共轴约束(1个),其均属于低副(PL),见图4。
在零部件组装完成后,应检查自由度是否符合要求。F=3n-2PL-PH(n=K-1,K为活动部件个数,PL为低副个数,PH为高副个数)。根据计算,n=10-1=9;PL=13; F=3*9-2*13=1。模拟结果显示,在电动推杆存在断电自锁的情况下,该机构的DOF=0,符合实际运行状态。
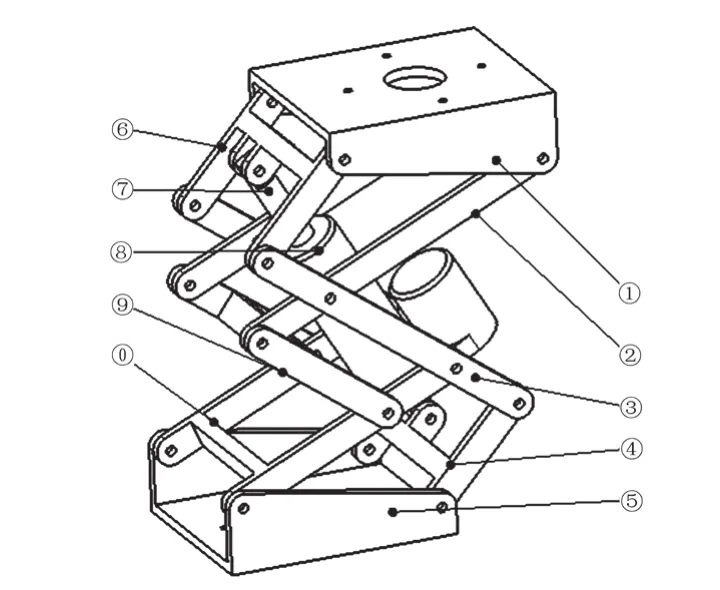
图4 虚拟组装图Fig.4 Virtual assembly drawing
经仿真分析,该机构存在一定的侧向偏移。在座椅行程(S1)内,最大偏移量Offset_max=135-105=30 mm,见图5。由此带来的问题是整个治疗椅在上升或下降过程中,重心位置会发生偏移,为了保证使用过程中不发生倾倒现象,必须适当调整底盘的配重,加强其平衡性。
3 速度及加速度分析
由于此次设计的五官科治疗椅的升降机构采用的是连杆机构,在运行的过程中,上升下降的连贯性,平稳性是必须要考虑的因素。连贯性主要是指在整个过程中不存在断点,可连续运行,而平稳性主要是指速度较恒定且加速度不大。经仿真分析,电动推杆速度[V]为20 mm/s的速度运行时,座椅的速度平均维持在35 mm/s,见表1。升降机构完成整个上升行程[S1]中,所需时间为8 s,数据显示升降速度快速且平稳,见图6。
加速度的大小,直接决定病人治疗过程中人体的舒适性,根据加速度曲线分析,整个上升过程中,其最大加速度不超过8 mm/s2,适合人体的加速度范围,见图7。
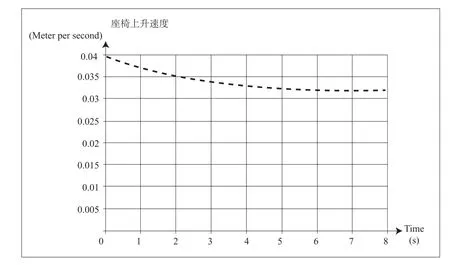
图6 座椅速度曲线Fig.6 Speed curve of chair
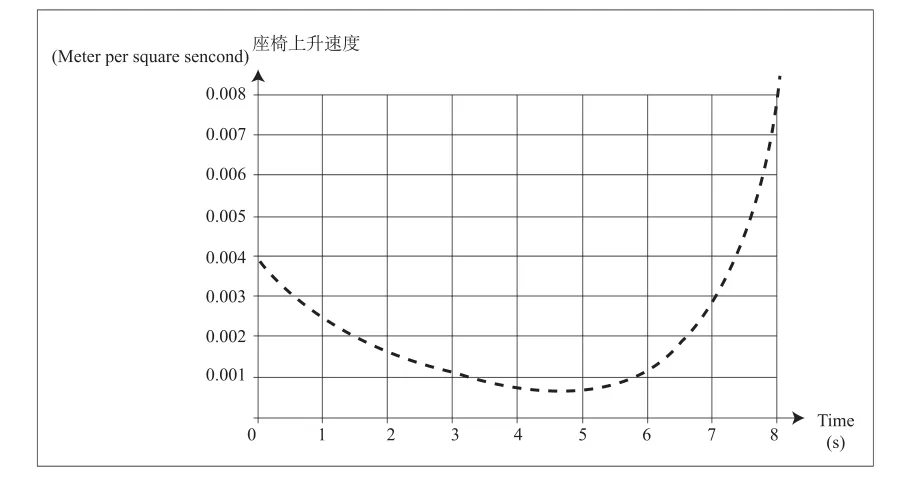
图7 座椅加速度曲线Fig.7 Acceleration curve of chair
4 结束语
此次设计中采用的连杆机构有诸多优点,例如成本大幅度减低,最低高度明显降低至450 mm,更适合亚洲成人和儿童使用,扩大了使用范围。纵观五官科椅的发展,我们不难看出,简洁、美观、实用是其发展的主线,新的控制技术和材料的发展,推动了产品的更新换代。在不远的将来,我们会看到更加智能的五官科治疗椅,为病人带来更加舒适的治疗体验。
[1]熊滨生 编.现代连杆机构设计[M].北京: 化学工业出版社,2006.
[2]孙桓 编.机械原理[ M].北京: 高等教育出版社,2001.
[3]毛春升.基于CATIA 的零件参数化建模技术研究与系统实现[D].武汉理工大学,2007.
[4]陈国华,程本松,杨敏.基于CATIA的机械零件虚拟装配方法[J].机械研究与应用,2006,19(1): 113-114.
猜你喜欢
实用中医药杂志(2021年3期)2021-07-14 10:31:54
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
设备管理与维修(2018年15期)2018-11-08 06:14:50
设备管理与维修(2018年8期)2018-08-13 12:09:14
现代职业教育·中职中专(2018年5期)2018-05-14 13:52:18
青年时代(2017年20期)2017-07-31 22:51:28
中国核电(2017年1期)2017-05-17 06:10:00
临床医药文献杂志(电子版)(2017年11期)2017-05-17 04:48:30