超声电机在磁悬浮飞轮锁紧装置中的应用**
2013-12-03 11:32李晓牛周盛强姚志远芦小龙
振动、测试与诊断 2013年4期
李晓牛,周盛强,姚志远,芦小龙
(1.南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
(2.南京航空航天大学精密驱动技术国防重点学科实验室 南京,210016)
引 言
磁悬浮飞轮是一种惯性执行器件,其控制精度和可靠性高,已应用到航天器姿态控制领域[1]。磁悬浮飞轮系统的转子和定子为非接触支撑,定子和转子之间存在间隙。由于在卫星发射阶段,飞轮系统要承受高加速度振动和冲击,因此需要额外设置锁紧装置顶紧转子以消除定、转子之间的间隙[2]。目前,使用的磁悬浮飞轮锁紧装置的驱动源主要有火工品和电磁电机两种。文献[3]提出了基于形状记忆合金驱动的锁紧装置。文献[4]提出了基于自锁原理的电磁锁紧装置。火工品驱动的锁紧装置[5]通常需要充气系统实现重复锁紧解锁功能,不可避免地生成污染性气体,且充气系统结构复杂、可靠性较差、体积大。文献[6]提出了一种基于步进电机驱动的锁紧装置,但电磁电机驱动输出扭矩较小,不能直接带动锁紧机构,需增加多级减速传动部件,使得锁紧装置体积和重量增大,锁紧时间增加。随着卫星和磁悬浮飞轮系统的进一步小型化,火工品和电磁电机做驱动源的锁紧装置已不能满足要求。
超声电机(ultrasonic motor,简称 USM)[7]具有结构紧凑、低速大转矩、响应快和断电自锁等优点,是一种理想的驱动元件。笔者研制了一种超声电机做驱动源的锁紧装置,并开展了超声电机驱动的锁紧装置试验研究,取得了良好效果,为磁悬浮飞轮的进一步小型化提供了可能。
1 锁紧装置的结构设计
1.1 驱动源的选择
驱动源的选择是锁紧装置设计的关键问题。由于其他驱动元件的限制,超声电机被认为是锁紧装置理想的驱动源之一。超声电机利用压电陶瓷的逆压电效应将电能转换成超声频率范围内的微幅振动,在定子和转子之间施加一定的预压力,通过定子和转子之间的摩擦作用将振动转换成转子的旋转运动进而驱动负载[8]。针对航天器对元器件重量和体积方面的要求,超声电机具有结构紧凑、转矩密度大、占用空间小、重量轻的优点,其低速大力矩可实现对传动部件的简化。由于其特殊的摩擦驱动[9]的原理,电机运动部件惯性小、响应快、能够断电自锁且保持力矩大。超声电机不产生电磁场,无需润滑,适合在空间环境中应用。
根据锁紧装置设计要求[2],笔者采用40型旋转型行波超声电机(traveling-wave rotary ultrasonic motor,简称TRUM),其结构和性能指标如图1和表1所示。由表1可知,TRUM-40型超声电机的额定扭矩为0.15N·m,堵转扭矩为0.3N·m,满足其要求的额定力矩0.1N·m,可带动锁紧装置完成锁紧功能。

表1 TRUM-40电机技术参数
1.2 锁紧装置的工作原理和结构
磁悬浮飞轮锁紧装置的工作原理是通过与电机输出轴相连的蜗轮蜗杆减速放大力矩后,带动锁紧执行机构将飞轮转子锁住,实现保护飞轮的目的。
锁紧装置由超声电机(驱动源)、传动机构、锁紧执行机构和支撑部件组成。传动机构包括蜗轮蜗杆、蜗轮连杆、钢丝绳和锁叉。锁紧执行部件为弹片,如图2所示。完成锁紧动作时,驱动控制系统控制超声电机正转,带动蜗杆正向转动。经过蜗轮蜗杆减速放大力矩后,蜗轮连杆被蜗轮通过键连接带动正向转动。随着蜗轮连杆的正向转动,锁叉会相向摆动,带动钢丝绳收紧。张紧的钢丝绳压弯锁紧执行部件弹片,进而抱紧飞轮实现锁紧动作。
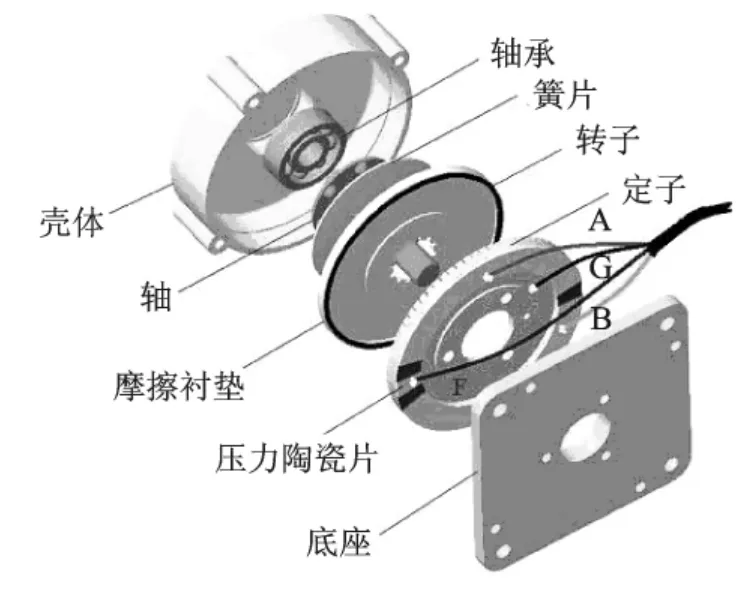
图1 TRUM-40电机结构分解图
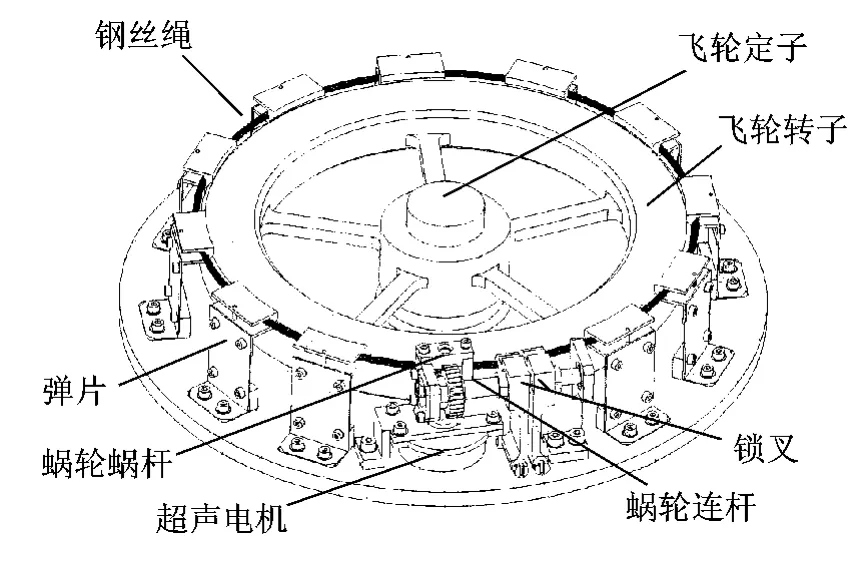
图2 锁紧装置结构图
2 锁紧装置驱动控制系统设计
为实现超声电机驱动的锁紧装置完成锁紧和解锁动作,设计了一套驱动控制系统。该驱动控制系统控制超声电机运行,产生超声电机激励信号,监视机械结构的运行位置和接受上位机指令。
该驱动控制系统主要包括单片机、超声电机驱动电路、限位开关、通信模块和本地测试模块,如图3所示。驱动控制系统工作原理是:单片机接受卫星主控计算机指令,做出相应判断,向超声电机驱动电路发出控制信号;超声电机驱动电路产生激励压电振子的两相高频正弦信号;同时限位开关监视锁紧装置运行位置,完成对锁紧装置锁紧和解锁动作的自动控制。

图3 驱动控制系统原理图
单片机选用了ATMEL公司89C52芯片。单片机接收外部信号,如通过RS232串行通信模块接收卫星主控计算机指令,通过I/O口限位开关信号。根据接收到的信号做出相应的判断,通过I/O口向超声电机驱动电路发送相应正转、反转或刹车电平信号。限位开关选用霍尼韦尔公司的11HM1限位开关,其精度和可靠性高,可用于空间环境。限位开关用于锁紧机构运动位置监测,监测是否锁紧到位或解锁到位。超声电机驱动电路以CYPRESS公司可编程片上系统PsoC3芯片为核心,设计有孤极反馈电路和推挽驱动电路[10]。利用PsoC3芯片的脉宽调制(PWM)模块产生两相相差90°的方波信号。通过推挽驱动电路功率放大、升压和匹配,产生两相相差90°的高频正弦激励信号,实现对超声电机的驱动。为提高超声电机机械输出特性的稳定,笔者利用孤级反馈电路实现对超声电机最优工作点的跟踪[11]。在实际运行中,卫星主控计算机通过RS-232通信接口实现对锁紧装置的远程控制。为了便于地面调试,驱动控制系统还设置了本地运行模式,显示运行状态和进行手动控制。通过本地运行模式可手动设置锁紧装置的启动、关闭、手动锁紧、手动解锁、急停和远程-本地模式切换等。驱动控制系统的主程序设计流程图如图4所示。
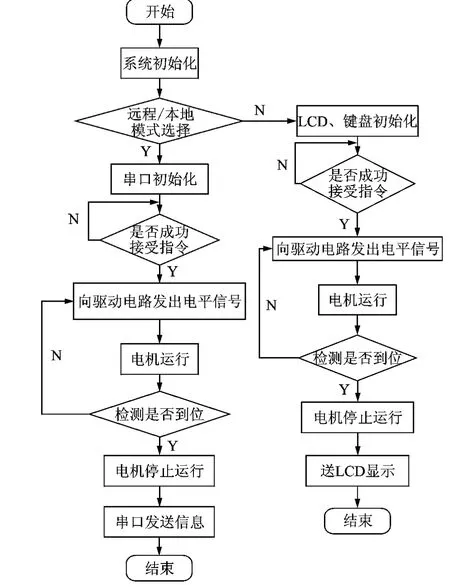
图4 驱动控制系统主程序流程图
3 试验研究
为了测试应用在锁紧装置中的超声电机性能和锁紧效果,笔者针对工作在特定工况下的超声电机电学输入参数和温升进行测试,并对锁紧装置的锁紧效果开展了试验研究。
3.1 超声电机电学输入参数的测试
对应用在锁紧装置中的超声电机相关电学输入参数进行测试,测试系统框图如图5所示。超声电机在锁紧行程中直流输入电压为12V,直流输入电流为0.64A,直流输入功率为7.6W。在解锁过程中,直流输入电压为12V,直流输入电流为0.56A,直流输入功率为6.7W。可见,超声电机直流输入功率和电流会随负载的变化而变化。
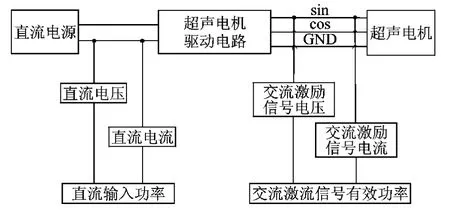
图5 超声电机电学参量测试系统框图
由于超声电机是一个时变、非线性系统,因而其机械输出特性不稳定,电学输入参数有较大波动。笔者采用带有孤极反馈的超声电机驱动电路,能有效地稳定超声电机输入、输出性能。图6为超声电机锁紧过程中输入电学参数随时间的变化曲线。由图6(a)可知,在整个锁紧过程中交流激励信号电压有效值稳定在120~130V之间,相对波动较小。图6(b)为锁紧过程中交流激励信号电流有效值随时间的变化,电流有效值稳定在0.14A。图6(c)为锁紧过程中施加在压电振子上的单相交流激励信号有效功率随时间变化的曲线。由于随着锁紧过程中负载的不断增加、电机非线性因素和电机发热量的累积,单相交流激励信号有效功率呈上升趋势。由图6可知,超声电机电学输入信号相对稳定,可以有效激励压电振子,验证了电机输入特性的稳定性。
3.2 超声电机温升测试
超声电机在运行中存在温升现象[12]。造成超声电机温升的原因主要是定、转子之间的摩擦驱动和压电振子的机电损耗。超声电机的温升是影响电机高效稳定运行的重要因素。一方面温升过高会使压电陶瓷的材料性能恶化;另一方面随着温度的升高,电机的工作频率会发生漂移,影响电机的稳定运行(输出转矩和转速的波动)。通常超声电机带载下的温升现象更加突出;因此,有必要对锁紧过程中超声电机温升特性进行测试,测试系统如图7所示。
超声电机温升测试试验数据如图8所示。可以看出,在空载时电机表面运行温度不超过40°C,温升值为10°C;超声电机驱动锁紧装置运行时,运行温度不超过34°C,温升值为4°C。由于超声电机与锁紧装置支撑部件接触,改善了超声电机的散热条件。根据TRUM-40型超声电机技术数据可知,该型电机表面允许上升温度为55°C,在许用范围内,符合航天设备对温升限制的要求,满足设计要求。
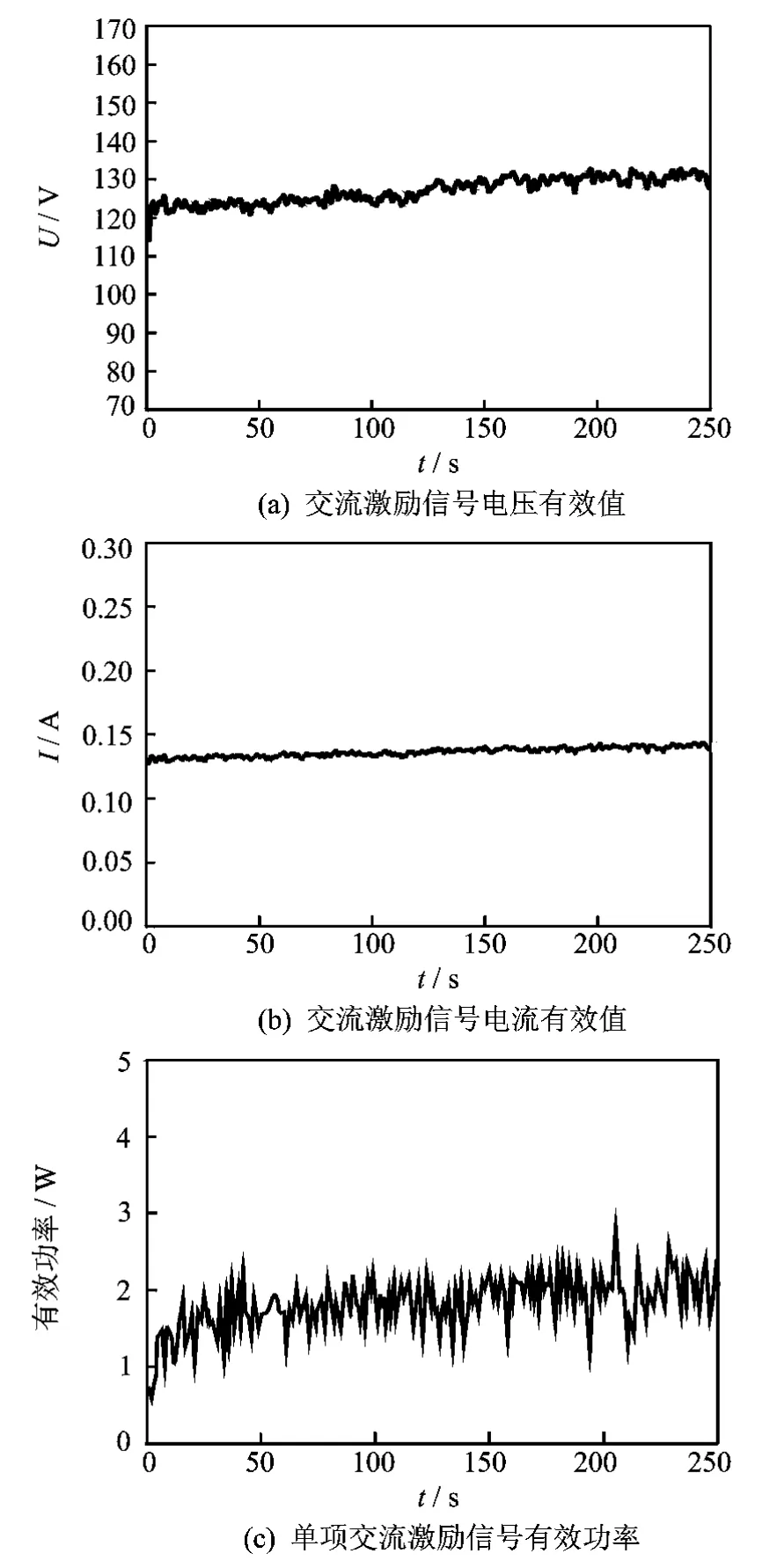
图6 超声电机电学输入参数曲线

图7 超声电机温升测试系统原理图
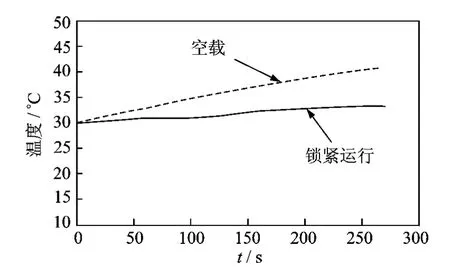
图8 超声电机温度上升随时间变化曲线
3.3 锁紧效果测试
由于锁紧装置作用在飞轮转子上,锁紧力不易直接测量。为了评估超声电机驱动的锁紧装置的锁紧效果,可在弹片根部附近粘贴应变片,测试弹片某一截面的应变,计算出锁紧装置沿半径方向的锁紧力。锁紧效果试验测试系统主要由YJ-451A1SZ静态数字电阻应变仪、锁紧装置和直流电源组成。
锁紧过程中距弹片端部L处截面应变随时间变化的曲线如图9所示。在前50s钢丝绳未被张紧,无应变。随着超声电机带动锁叉拉紧钢丝绳,弹片受压,应变迅速增加。在接近锁紧状态时,弹片与飞轮接触,进而抱紧飞轮,应变趋于一固定值。
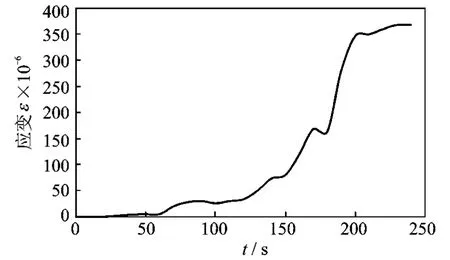
图9 弹片截面应变与锁紧时间的曲线
将弹片简化成一端固定支承,另一端自由的悬臂梁模型,计算沿径向锁紧力F,如图10所示。在钢丝绳拉紧、弹片未与飞轮接触时,弹片受压,钢丝绳对弹片的压力为P,即弹片载荷P。在锁紧状态,弹片与飞轮接触,P即为作用于飞轮上的沿径向锁紧力F[13]。载荷P根据材料力学公式得到
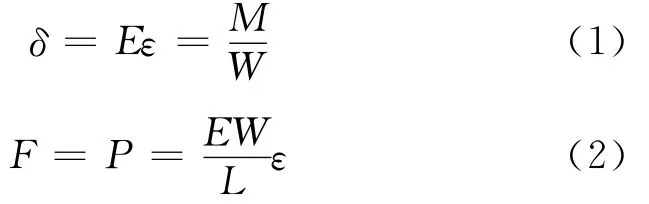
其中:δ为应力;ε为应变片测试的应变值;M为弹片的弯矩;L为力臂;E为弹片材料的弹性模量;W 为抗弯曲截面系数。
对于矩形弹片截面

其中:b为弹片宽度;H为弹片厚度。
计算参数为W=24mm3,E=206GPa,L=30mm。锁紧装置10个弹片3次测试结果的平均应变值为360×10-6。经式(2)得到锁紧时弹片沿半径方向锁紧力F=17.1N。通过电磁电机驱动的锁紧装置做对比,当弹片沿半径方向,锁紧力为15N时即可实现锁紧,满足设计要求。所设计10个弹片共可对飞轮施加沿半径方向的锁紧力为171N。
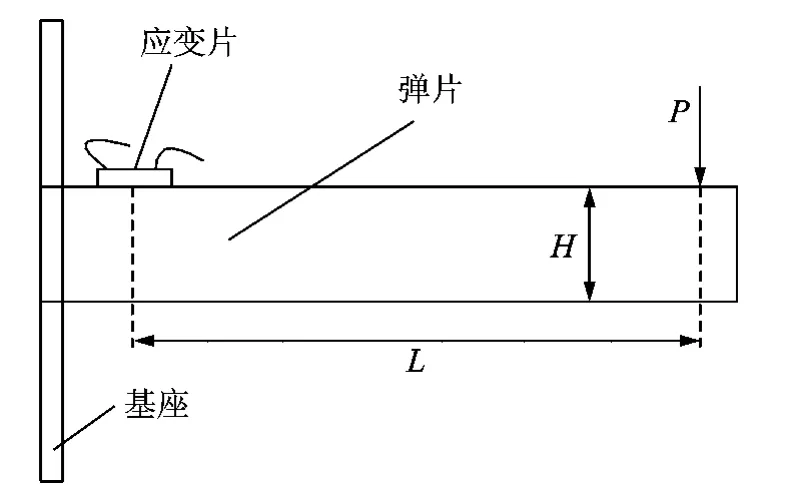
图10 锁紧效果测试原理示意图
4 结束语
设计了超声电机驱动的磁悬浮飞轮锁紧装置,具有重量轻、占用空间小,简化了传动部分设计的优点,实现了锁紧装置的锁紧和解锁,达到了保护飞轮的目的。针对超声电机驱动控制的特点,设计了锁紧装置驱动控制系统,取得了良好的控制效果。进行了超声电机驱动的锁紧装置试验,对锁紧过程中的超声电机性能和锁紧装置的锁紧效果进行测试。超声电机电学输入参数的试验表明:超声电机锁紧和解锁功率分别为7.6W和6.7W;电学输入参数稳定。锁紧过程中电机温升为4°C,运行温度不超过40°C,在许用范围内。对锁紧效果进行测试的结果表明,锁紧装置沿半径方向锁紧力为171N。超声电机是锁紧装置理想的驱动源,为磁悬浮飞轮系统的进一步小型化提供了可能。
[1] 吴刚,刘昆,张育林.磁悬浮飞轮技术及其应用研究[J].宇航学报,2005,26(3):385-390.Wu Gang,Liu Kun,Zhang Yulin.Application and study of magnetic bearing flywheel technology [J].Journal of Astronautics,2005,26(3):385-390.(in Chinese)
[2] 刘强,房建成,韩邦成,等.磁悬浮飞轮锁紧装置及其优化设计[J].光学精密工程,2010,18(8):1814-1821.Liu Qiang,Fang Jiancheng,Han Bangcheng,et al.Locking device for magnetic bearing flywheel and its optimization [J].Optics and Precision Engineering,2010,18(8):1814-1821.(in Chinese)
[3] 闫晓军,张小勇,聂景旭,等.采用SMA驱动的小型空间磁悬浮飞轮锁紧机构[J].北京航空航天大学学报,2011,37(2):127-131.Yan Xiaojun,Zhang Xiaoyong,Nie Jingxu,et al.Prototype SMA actuated locking device for small space magnetic bearing flywheels[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(2):127-131.(in Chinese)
[4] 韩邦成,刘强.基于自锁原理的磁悬浮飞轮电磁锁紧机构[J].光学精密工程,2009,16(4):662-666.Han Bangcheng,Liu Qiang.Electromagnetic locking device based on self-locking for magnetic suspended flywheel[J].Optics and Precision Engineering,2009,16(4):662-666.(in Chinese)
[5] Privat M,Costa A D.Pneumatic locking device for magnetic bearing reaction wheel[C]∥Proceedings of the 10th European Space Mechanisms and Tribology Symposium.San Sebastian:[s.n.],2003:1-8.
[6] 刘晓东,余立辉.磁悬浮飞轮自动锁紧系统的研制[J].机械与电子,2007,1(3):33-36.Liu Xiaodong,Yu Lihui.Development of automatic locking system for magnetic bearing flywheel[J].Machinery and Electronics,2007,1(3):33-36.(in Chinese)
[7] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007:1-2.
[8] 周盛强,赵淳生,黄卫青.旋转型行波超声电机接触界面空间域分析[J].中国电机工程学报,2010,30(12):63-68.Zhou Shengqiang,Zhao Chunsheng,Huang Weiqing.Contact analysis of traveling wave type rotary ultrasonic motor in space domain[J].Proceedings of the CSEE,2010,30(12):63-68.(in Chinese)
[9] 姚志远,吴辛,赵淳生.行波超声电机定、转子接触状态试验分析[J].振动、测试与诊断,2009,29(4):388-391.Yao Zhiyuan,Wu Xin,Zhao Chunsheng.Test of contact interface properties of stator and rotor in travelling wave ultrasonic motors[J].Journal of Vibration,Measurement & Diagnosis,2009,29(4):388-391.(in Chinese)
[10]李华峰,赵淳生.基于LC谐振的超声电机驱动器的研究[J].中国电机工程学报,2005,25(23):144-148.Li Huafeng,Zhao Chunsheng.Research on the ultrasonic motor driver based on LC resonant[J].Proceedings of the CSEE,2005,25(23):144-148.(in Chinese)
[11]李华峰,冒俊,马春苗.基于可编程片上系统的超声电机小型驱动电源[J].压电与声光,2009,31(3):370-373.Li Huafeng,Mao Jun,Ma Chunmiao.Micro-driver for ultrasonic motors based on PSoC [J].Piezoelectrics & Acoustooptics,2009,31(3):370-373.(in Chinese)
[12]芦小龙,丁庆军,李华峰,等.行波型旋转超声电机的低温特性[J].振动、测试与诊断,2010,30(5):529-533.Lu Xiaolong,Ding Qingjun,Li Huafeng,et al.Cryogenic temperature performance of traveling wave ultrasonic motor[J].Journal of Vibration,Measurement& Diagnosis,2010,30(5):529-533.(in Chinese)
[13]计欣华,邓宗白,鲁阳,等.工程实验力学[M].北京:机械工业出版社,2009:120-122.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
模具工业(2021年5期)2021-05-20
设备管理与维修(2020年23期)2021-01-04
幸福·悦读(2020年6期)2020-07-09
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
文艺生活·下旬刊(2018年5期)2018-07-23
时代汽车(2018年12期)2018-06-18
军事文摘(2017年16期)2018-01-19