
欧洲“火星快车”探测器自行底盘概念设计的启示
2013-11-28 02:22:14王宇燕
航天器环境工程 2013年2期
王宇燕
(中国北方车辆研究所 信息中心,北京100072)
0 引言
世界各航天大国均重视对行星表面的探测。利用行星表面巡视探测车(漫游机器人),可完成对行星表面的地形地貌实地勘测[1]。前苏联最早将月球车送上月球,而美国不仅实现了载人登月,而且还开展了一系列的火星表面巡视探测。国内相关研究开展较晚,但也掀起了行星表面巡视探测车的关键技术研究热潮,承担相关技术研发的单位众多,已取得了一些研究成果。
作者对国外的月球车和火星车进行了跟踪调研,重点考察了欧洲空间局(ESA)的“火星快车”探测器项目[2],其中探测器的底盘设计由俄罗斯承担。本文对“火星快车”(以下称火星车)自行底盘概念的设计思想和具体实施情况进行了深入分析。
1 火星车的运动性能考虑
火星车在任务、功能、结构、控制方法等主要方面与月球车有很多相似之处[2]。月球表面地形复杂,崎岖不平,而且还覆盖了一层厚厚的风化层,这种松软细密的风化层很容易使月球车车轮打滑,从而失去牵引作用,甚至陷入月壤无法前行[3]。因此,月球车要完成预定的探测任务,就必须要有良好的运动性能,包括越障性能、爬坡性能、通过性能、抗倾覆性能以及地形适应性能等[4]。同样,火星车在火星表面不同地形地貌上移动并完成预定的探测任务,须考虑与月球车一样的共性问题。
火星车的运动性能与其底盘设计密切相关。在考虑火星车底盘方案类型时,最重要的因素是车轮在火星疏松土壤上的支撑通过性能和在火星复杂崎岖表面(如岩石障碍)的几何通过性能[5]。火星车底盘方案设计应考虑在满足几何通过性能要求的基础上,最大限度地提高火星车的支撑通过性能[6]。为了确保火星车对火星表面的适应性和巡视探测任务的成功,除了提高其各项运动性能外,这些性能具有高可靠性同样至关重要。
2 火星车底盘方案的初步考虑
2.1 底盘类型的选择
火星车的底盘主要有轮式底盘和履带式底盘两种类型。履带式推进装置具有较高的牵引能力,但结构较复杂,其与轮式底盘相比效率较低,而且可靠性较差。因此,优先选择轮式底盘方案。
2.2 推进装置的选择
为提高火星车底盘轮子的牵引能力,俄罗斯车辆运输研究所经过广泛而深入的研究,开展了理论仿真和地面试验,提出了轮式-跨步组合形式的推进装置。
尽管这种新的推进装置比轮式推进装置略重些(因为它增加了一个额外的驱动器),但能使车轮相对于底盘本体作纵向位移。通常,行星车在发射飞行中是折叠放置到紧凑的运输舱中,当着陆到行星表面上后,它才会展开成工作姿态,而展开动作就要用到一些特殊的展开驱动机构。轮式-跨步推进装置中的展开功能由跨步驱动执行,不再需要额外的机构,避免了质量的增加。因此,“火星快车”项目中的火星车演示样机优先选用了这个方案,如图1所示。

图1 “火星快车”项目的火星车样机Fig. 1 Model prototype of rover for Mars Express program
2.3 轮式方案的选择
四轮式车辆的参数h /D(车辆越过台阶高度与车轮直径之比)的理论极限值为 0.4(在附着系数φ≥1的条件下),而非标准的六轮式车辆,其参数h /D的数值可以超过1.0,并且每个轮子的载荷更均匀,可确保车轮有较大的行程。因此,火星车选择6×6轮式方案。
3 火星车的底盘结构方案
3.1 悬挂方案
影响“火星快车”的通过性能的最重要因素之一是轮子的承载情况:轮子承载越均匀,则其通过性能就越好。
轮子的自行底盘设计受到了极大的限制,因为它要求将整个有效载荷分布到单位容积上。在这种情况下,尤其不能采用铰接的自行底盘[7]。
可以采用的有非独立弹性悬挂和平衡式非弹性悬挂两种方案。
1)非独立弹性悬挂方案
非独立弹性悬挂方案的结构非常简单,苏联和美国最早的月球车采用的都是这种方式。但是,这种悬挂方式有其自身的缺陷:当车沿着复杂的路面行走时,所悬挂的弹性元件并不能确保轮子承受常量载荷。此外,当车爬坡的时候,这种悬挂方式还降低了车行的稳定性。为了克服这些缺点,俄罗斯车辆运输研究所对火星车进行了改进设计,研制出IARES 模型样机(图2),采用专门的驱动机构以改变悬挂弹性元件的受力状态。当然,改进设计会使结构变得愈加复杂,相应也会增加质量。

图2 IARES 模型样机Fig. 2 Model prototype of IARES
2)平衡式非弹性悬挂方案
平衡式非弹性悬挂方案通过所悬挂的元件改变轮子的运动关系,从而平衡每个车轮的承载情况。这种悬挂方案在4×4轮式底盘中实现起来比较简单,而在6×6轮式底盘中就较为复杂。综合考虑各方面的因素,研究人员认为平衡式非弹性悬挂方案适用于“火星快车”。
3.2 自行底盘的组合方案
最初研究和分析时,考虑有以下几种自行底盘的组合方案:
1)4×4×4轮式结构和平衡式非弹性悬挂的自行底盘的组合方案(A型);
2)4×4×4+4ш轮式结构和平衡式非弹性悬挂的自行底盘的组合方案(B型);
3)6×6×4+4ш轮式结构和平衡式非弹性悬挂的自行底盘的组合方案(C型)。
每个组合方案中的第 3个数字表示装的转向驱动的车轮数量,而符号“+4ш”表示有 4个跨步驱动器。
А型和 В型自行底盘的每一侧轮子成对地装在一根纵向平衡的拉杆上,用同步机构附加联动,而同步机构可保证平衡构件相对于车架向相反方向旋转同样的角度。每个车轮都配有单独的转向驱动机构。
B型方案的每个轮子还另配装了跨步驱动器,而A型方案没有。图3所示的是B型自行底盘的各种姿态:а、b、с分别为车体标定、车体升高后和车体降低时的姿态;d 为跨步时的姿态;е为沿崎岖不平路面行驶的姿态;f为在运输时的姿态;g、h、i均为工作时的姿态。
图4 所示的是C型自行底盘的各种姿态。该自行底盘的每侧轮子之间互相联结,轮子又通过悬挂方式与车架相联结;而悬挂方式是一个铰接-杠杆机构,其运动可以使每侧3个轮子的载荷均匀地分布,此外,3个轮子侧向的模块之间通过同步机构相联结(类似于А 和В型底盘的结构)。4个角上的轮子均配有单独的转向驱动机构和跨步驱动器。图4中各种姿态的定义如下:а、b、с均为当底盘沿崎岖不平路面行驶时的姿态,d、e分别为车体升高后和车体降低时的姿态;f为自行底盘车体往土壤上着落的姿态;g、h均为工作时的姿态;i为在运输状态下的姿态。
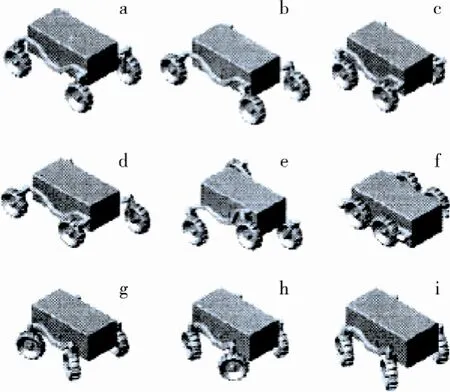
图3 B型自行底盘和它的各种不同姿态Fig. 3 B type chassis and its various configurations
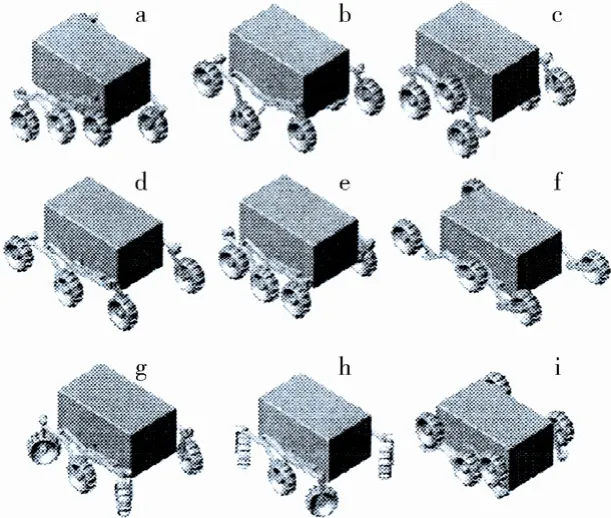
图4 C型自行底盘和它的各种不同姿态Fig. 4 C type chassis and its various configurations
3.3 3种组合方案的比较
表1列出了A型、B型和C型自行底盘的技术特性比较。
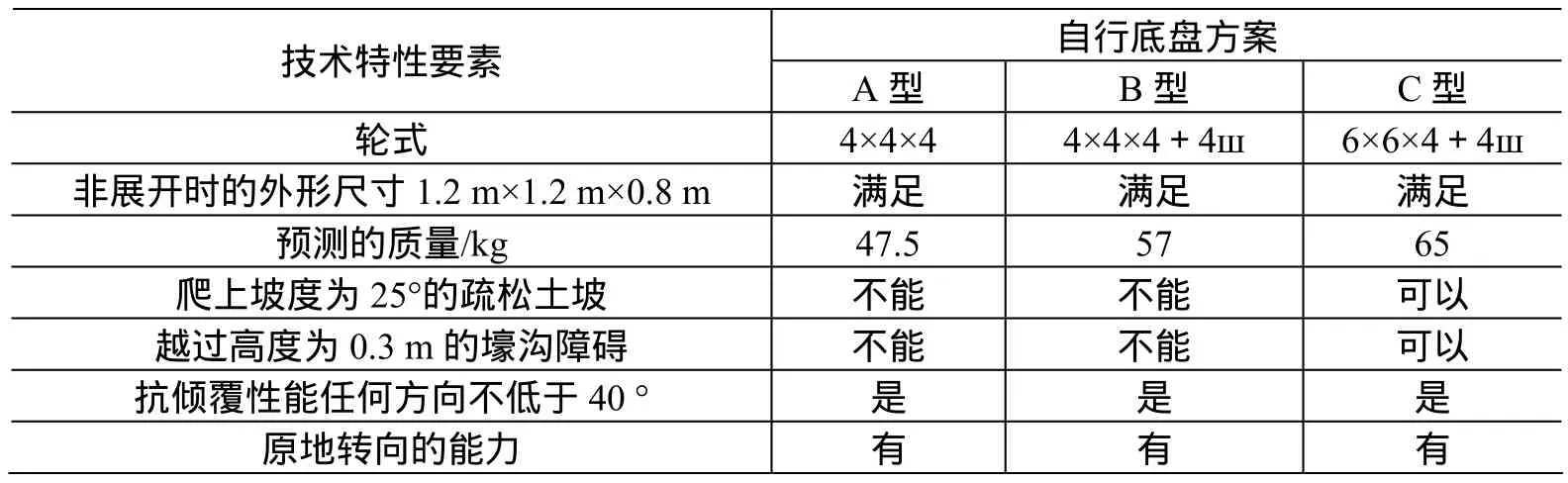
表1 3种自行底盘方案的技术特性比较Table1 Comparison of the calculated characteristics between three self-propelling chassis plans
从表1中可以看出:С型自行底盘的质量偏大,但技术特性最佳,因此它被确定为最优方案。
3.4 C型组合方案的进一步优化
为了提高“火星快车”的通过性能,对 C型组合方案的悬挂结构作进一步改进设计。
平衡式非弹性悬挂的理想状态是,不仅要确保火星车在平坦的路面上行驶时每个轮子上所承受的载荷均匀,而且在复杂的路面上行驶时所承受的载荷同样要均匀。
图5所示的是6×6轮式火星车逾越障碍物的受力情形。
越过障碍物的理想条件是:φ3(φ1Pz1+φ2Pz2)≥Pz3。当φ1=φ2=φ3时,悬挂方式已确保轮子在任意垂直方向上φ≥0.7移动时能实现Pz1≈Pz2≈Pz3,也就是说如果附着系数大于0.7,在均匀的土壤上越障,有可能实现轮子均匀承载。但是实际情况如图 5 所示的情形,即轮子在沿崎岖不平的路面匀速行驶的时候,有一个纵向移动的分运动,这个运动会让轮子承受的载荷重新分布,使得Pz2的值极大地减小;当Pz2接近0的时候,越障条件是φ≥1。火星上最典型的越障情况是凸出的石头,此时的越障条件应为φ1<0.4~0.5[7]。为了越过障碍,要求后轮与障碍物的附着系数大于2,而在大部分情况下这是不可能达到的。
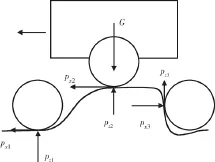
图5 自行底盘越障时每个轮子的受力示意图Fig. 5 Schematic diagram of the forces acting on each wheel when the self propelling chassis goes over obstacles
这样一来,火星车的几何通过性能在很大程度上取决于悬挂方式的特性。为了提高火星车的几何通过性能,应设法避免轮子作纵向移动。这也是火星车成功设计的关键。
4 模型样机的试验研究
针对以上的方案分析结果,俄方研制了模型样机(比例为1∶2),称之为“ExoMaDeR”样机(如图6所示)。
在样机研制中,所采用的方案没有配装跨步驱动器,而是用专门的离合器来替代,以模拟跨步驱动器的功能。
模型样机每侧轮之间相互联结,轮子又通过悬挂方式与车架相联结,而悬挂方式采用的是绞链-杠杆机构。此外,3个轮子侧向模块之间采用同步机构联结。
ExoMaDeR模型样机在ESTEC的试验场进行了试验,验证结果表明:其全负载情况下的通过性能甚至比无负载下的通过性能尤其是稳定性还要好[8],也没有出现轮子纵向移动。由此可见,自行底盘概念设计的思想是正确的。
5 结束语
行星车在复杂地形中的运动能力、稳定性和可靠性,将直接影响深空探测项目的成败[9]。2013年,我国按计划将发射月球车,开展月面巡视探测。在此基础上,我国还将制定和实施火星探测计划。为了确保巡视探测任务的成功,广泛地吸纳国外的成功经验尤为重要。
通过对“火星快车”自行底盘设计思路的跟踪调研与分析,得出了一些基本结论,这些工作可为我国开展行星车的进一步研究提供参考。针对我国深空探测项目实施的需求,应在以下几个方面开展工作:
1)车轮土壤支撑通过能力的理论研究和试验验证研究;
2)以单侧车轮负载均衡化为设计目标的行走构型的研发;
3) 深空探测行星车专用部件的模块化设计研究,以利于根据不同的探测任务实现功能的快速组合;
4)具有整车折叠的跨步机构的研究,以提高车辆通过性能。
(References)
[1]Кемуржная А Л, Громов и др В В. Планетоходы[M].Мoskva: Машиностроение, 1982
[2]卢波, 范嵬娜. 国外月球车及火星车技术的发展综述[C]//中国空间科学学会空间探测专业委员会第十八次学术会议, 2005
[3]葛平淑, 郭烈, 王孝兰, 等. 松软月面上月球车动力学建模及运动控制研究[J]. 计算机工程与应用, 2011,47(12): 1-4 Ge Pingshu, Guo Lie, Wang Xiaolan, et al. Dynamic modeling and motion control for lunar rover on loose soil[J]. Computer Engineering and Applications, 2011,47(12): 1-4
[4]苏波, 江雷, 房加志. 月球车月面支撑通过性研究及车轮优化设计[J]. 机械设计与制造, 2011, 4(4): 21-23 Su Bo, Jiang Lei, Fang Jiazhi. Research on supportingtrafficability of lunar rover and wheel design optimization[J]. Machinery Design and Manufacture,2011, 4(4): 21-23
[5]Кемуржная А Л, Громов В В, Кажукало и др И Д.Передвижение по грунтам Луны и планет[M].Мoskva: Машиностроение, 1982
[6]Мaurette М, Lamboley M, Koutcherenko V, et al.Development of the demonstrator of the self-propelled chassis for the Mars rover on the basis of the INTAS-CNES project[C]//Proceeding of ESA Worshop ASTRA’02. Noordwijk, The Netherlands, 2002
[7]Беккер М Г. Введение в теорию систем местность машина[M]. Мoskva: Машиностроение, 1973: 63-69
[8]Кучеренко В И, Богачев А Н. Шасси марсохода европейского проекта "ЕXOМARS"[C]//Материалы международных семинаров, 2006
[9]陈世荣. 摇杆-转向架式月球车月面通过性能研究[D].合肥: 中国科学技术大学博士学位论文, 2009
猜你喜欢
雪豆月读·低年级(2023年9期)2023-11-20 01:43:52
工业工程设计(2021年3期)2021-06-30 12:15:04
军民两用技术与产品(2021年10期)2021-03-16 06:05:36
人民调解(2019年1期)2019-03-15 09:27:24
经济技术协作信息(2018年7期)2019-01-14 03:05:40
中国军转民(2018年1期)2018-06-08 05:52:57
青年时代(2016年32期)2017-01-20 00:23:33
太空探索(2016年9期)2016-07-12 10:00:05
中学科技(2015年7期)2015-07-03 05:44:32
筑路机械与施工机械化(2014年7期)2014-03-01 03:00:18
