静水压力取样器冲击头冲击速度的理论与试验研究
2013-11-22 00:59秦华伟朱敬如王建军陈建桥
海洋工程 2013年2期
秦华伟,朱敬如,王建军,陈建桥,陈 鹰
(1.杭州电子科技大学 机械工程学院,浙江 杭州 310018;2.浙江大学 机械工程学系,浙江 杭州 310027)
作为地球上资源最为丰富的地区,海洋蕴藏着数量远超陆地的矿产、油气和生物等一系列资源[1]。随着陆地资源的不断消耗,人类逐步加大了对海洋资源的探索力度。由于历史原因,我国对海洋资源的勘探及开发程度还远远不够。
目前,无论对海底资源,还是对海底地质的勘探等都离不开海底取样技术。海底取样技术与海洋油气钻探不同,它主要利用取样管完成一次性取样,实现对指定海域的浅孔钻取,其采样周期短,采样过程简便易行[2]。其中,非可控式海底取样器由于对母船的要求较低而得到广泛应用。
本文所设计的新型静水压力驱动取样器就是一种非可控式海底取样器,该取样器利用海水静水压力提供能量完成冲击打桩动作,此外,该取样器还可在一定程度上缓减及推迟“桩效应”的出现,从而提高沉积物样品的取样效率[3]。
国外对静水压力驱动取样器的研究较早,技术也较为成熟。Brooke and Gilberr[4],Selwyn and McCoy[5]提出了利用静水压力驱动液压马达的设计,在一次试验中,液压马达把冲击头抬升了60 次,抬升高度为0.33 m,最终获得了2 m 长的硬质灰泥样品;Yngve Kristoffersen,et al[6]提到,在一次3 500 m 水深的海底取样中,“the Selcorer”以2 s 的频率冲击振动取样管50 次,取样器下插深度达到18 m,样品长度12.5 m。国内对静水压力驱动取样器的研究尚处起步阶段。
在取样器外形参数及重量确定的前提下,取样器贯入海底沉积物的效果取决于取样器冲击头的冲击速度[2,7]。因此,本文将从理论推导和实验验证的角度出发,探讨影响取样器冲击头冲击速度的主要因素,并对提高该冲击速度提出建议。
1 静水压力驱动取样器
1.1 取样器的总体结构
静水压力取样器(如图1(a)所示)主要包括驱动马达机构、取样器冲击头、取样管三个部分。其中冲击头和驱动马达为本文的主要研究对象。驱动马达(如图1(b)所示)主要包括配流阀体、阀芯、主活塞、主活塞杆、主活塞缸等部分。驱动马达活塞杆上开有若干小孔,便于高压海水进出配流阀,驱动阀芯上下运动,控制开口使海水进入活塞缸或者流出活塞缸进入空腔。驱动马达的主要设计参数如表1 所示。
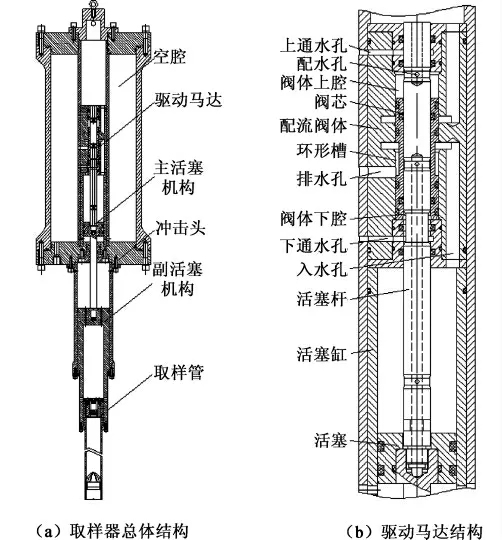
图1 取样器及驱动马达结构Fig.1 The structure of the corer and drive motor
1.2 取样器的工作原理
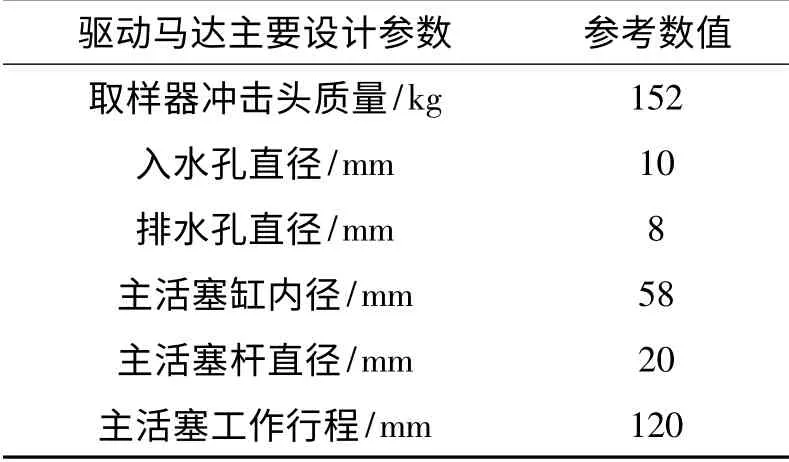
表1 驱动马达主要设计参数Tab.1 The main design parameters of the drive motor
静水压力驱动取样器工作时,先在重力及惯性作用下以“重力取样”方式插入海底,然后自动切换为“静水压力冲击取样”方式进行沉积物取样。在“静水压力冲击取样”状态下,取样器利用外界海水与其空腔之间的压差,先将冲击头抬升一定高度,然后释放冲击头,冲击头冲击取样管,下插取样,并重复上述动作,直至取样器空腔压强与外界海水压强相当。
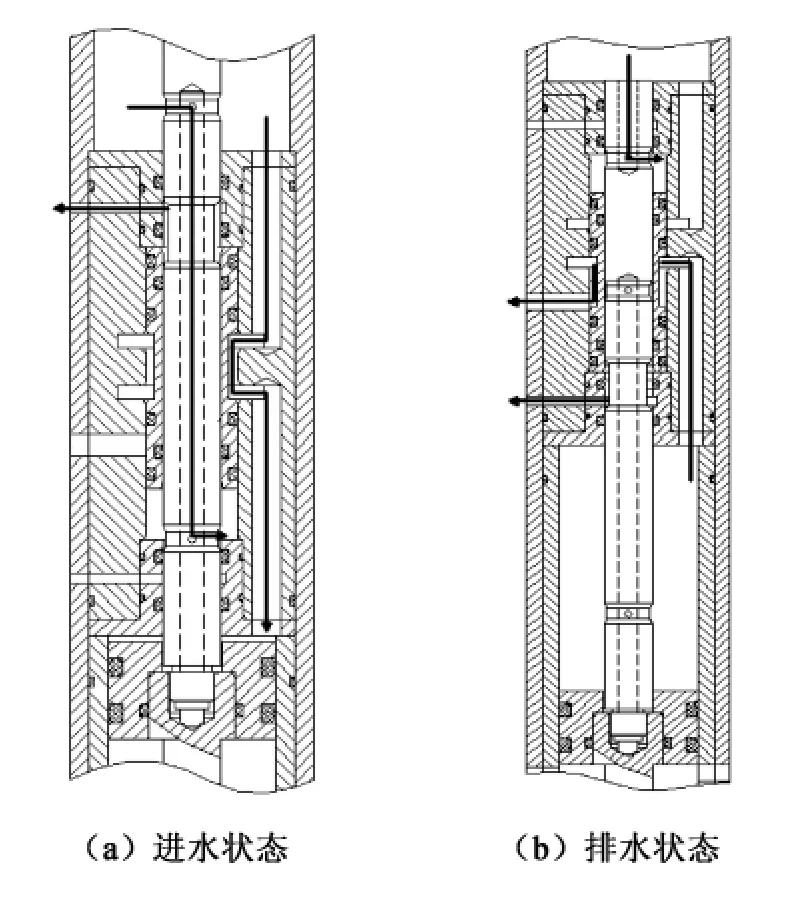
图2 驱动马达工作过程Fig.2 The working process of the drive motor
图2 所示为静水压力取样工作过程中驱动马达的两个主要状态。1)当取样器由“重力取样”切换为“静水压力冲击取样”状态时(如图2(a)所示),高压海水通过下通水孔进入配流阀体下腔,阀芯下端为高压状态;阀芯上端经上通水孔与空腔相连通,形成低压状态;在上下压差作用下,阀芯向上运动至配流阀体上端。此时,入水孔打开,排水孔关闭,高压海水沿流道进入活塞缸;在高压海水作用下,冲击头上升至上极限位置后停止。2)第一阶段结束后,如图2(b)所示,配流阀体下腔通过下通水孔与空腔相连,阀芯下端为低压状态;同时,配流阀体上腔通过上配水孔与高压海水相连通,高压海水进入配流阀体上腔,阀芯上端为高压状态;在上下压差作用下,阀芯向下运动至配流阀体下端;此时,进水口关闭,排水孔打开,活塞缸内高压海水通过入水孔、环形槽、排水孔排入空腔;随着活塞缸内高压海水的排出,冲击头迅速下落,冲击副活塞机构,最终使取样管进一步插入海底沉积物。3)循环往复上述过程,取样器冲击头多次冲击取样管取样,直至空腔内海水压强与周围高压海水压强相当,静水压力取样过程结束。
2 冲击头冲击速度的理论计算
2.1 流体流动控制方程
2.1.1 连续性方程
根据流体力学中质量守恒规律,选择取样器活塞缸及配流阀体作为被研究的控制体积,将该控制体积流进和流出的水流体积变化作为研究对象,可用如下连续性方程[8]表示:

式(1)中:Qin为入水孔水流量,Qout为排水孔水流量,Qmid为中间段环形槽内水流量,Q 为活塞缸内水流量。该连续性方程进一步推导,可得:

式(2)中:vin,vout,vmid,v 分别表示入水孔、排水孔、环形槽和活塞缸的水流速度,Ain,Aout,Amid,A 分别表示入水孔、排水孔、环形槽和活塞缸内水流的过水断面面积。由于活塞行程就是冲击头的下落行程,因此活塞缸的水流速度也即冲击头的下落速度。
2.1.2 动量方程
根据动量定理可得控制体积下落过程中的动量方程公式[8]:

式(3)中:d(mv)/dt 为控制体积的动量变化,d(mrvr)/dt 为控制体积内流体的动量变化,∫AurρdQ 为流出控制体积表面的动量净变化率,将取样器冲击头及其配流阀体内各部分流体作为研究对象,可得其相应的动量方程:

式(4)中:m 为取样器冲击头质量,mr为取样器阀体内水质量,vr为取样器阀体内水流平均速度,R 为阀芯与活塞杆、阀芯与配流阀体及活塞与活塞缸的总摩擦力,P1为取样深度处海水的静水压强。实际计算过程取垂直方向为参考方向,并以向下为正方向。
2.1.3 能量方程
考虑到水在控制体积内的流动过程是非恒定的,因此加入惯性项,并参考重力场中实际不可压缩性流体恒定流动的伯努利方程,得到非恒定流动情况下的伯努利方程[8]:

式(5)中:ρ 为取样水域海水密度,H 为排水孔与入水孔的高度差,hε为水流在管道中受干扰造成的总损失,S为水流流线长度。取入口处为参考点。假设在整个流线ds 上是相等的,且可用流线上最大值表示。
局部损失hε包括断面收缩、断面扩张和弯管三个方面损失即hε=hm1+hm2+hm3。
其中,ξ 表示突然收缩时局部阻力系数,根据Weisbach 经验公式对k 取值,θ 表示流速方向改变的角度。本文在计算局部损失时忽略了水流在直管道的流动损失。
2.2 冲击速度的理论计算
计算时取空腔初始压强为P2为0 MPa,且假设取样器空腔短时内压强稳定,根据式(2)、(4)、(5),消去各式中P1量,将式中各速度均用冲击头速度表示,并忽略微小量可得取样器冲击头下落速度的通式:

式(6)中:a 为取样器冲击头质量,即a=m;b 为与驱动马达结构中入水孔、排水孔和活塞缸内壁过水截面面积、局部损失等参数相关的量,即为与取样器质量、排水孔与入水孔的高度差、活塞缸内壁过水截面面积及取样器相关结构与密封圈之间的摩擦等参数相关的量,即c=ρgHA-mg+R。
根据本文所设计的取样器结构,将表1 所列驱动马达设计参数代入公式(6),可得:
通过计算可得:冲击头从上极限位置下落至下极限位置所需时间为t=0.577 6 s;冲击头下落至下极限位置时的最大速度为v理论=0.221 5 m/s。
3 实验验证
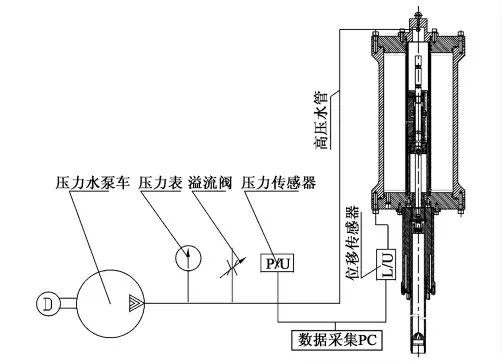
图3 取样器冲击试验系统示意Fig.3 The diagram of the corer's impact test system

图4 取样器冲击试验系统照片Fig.4 The photos of the corer's impact test system

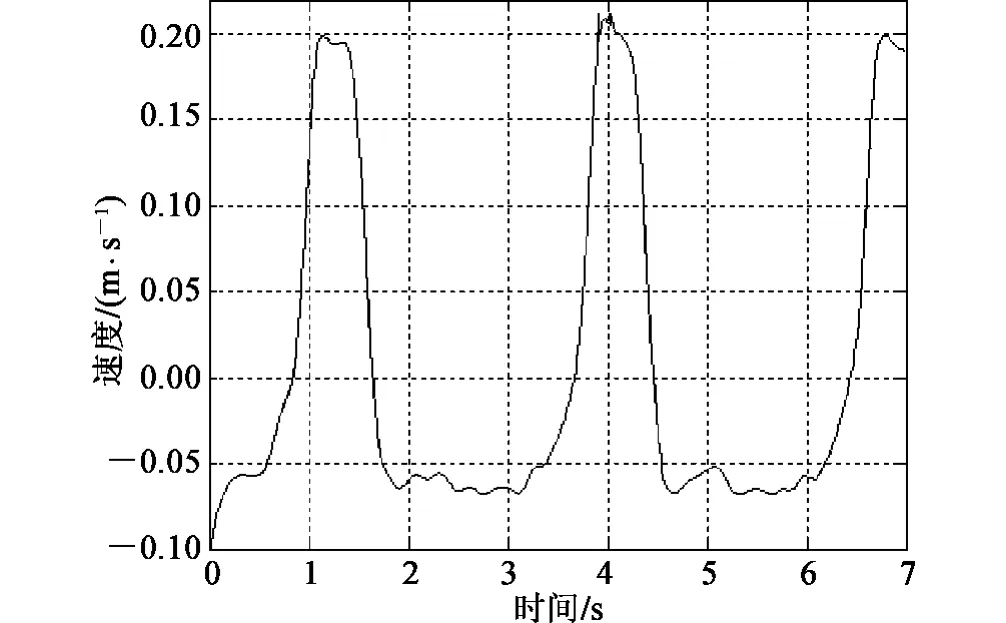
图5 冲击头冲击速度曲线Fig.5 The impact velocity curve of the impact head
为验证上述理论推导的正确性,搭建了静水压力取样器冲击试验系统(如图3、图4 所示)。该试验系统主要包括压力水泵车、压力表、溢流阀、高压水管、压力传感器、数据采集PC、位移传感器、取样器和取样器框架等部分。其中,压力水泵车提供高压水,用于模拟高压海水环境;位移传感器固定于冲击头上,用于获取取样器冲击头作抬升和冲击运动时的位移数据;PC 中相关软件对位移量进行求导,即可得到冲击头的冲击速度。
试验结果如图5 所示,冲击头从上极限位置下落至下极限位置所需时间为t =0.5 s,冲击头下落至下极限位置时的最大冲击速度为v理论=0.194 m/s。
取样器冲击头从上极限位置下落至下极限位置所需时间及其最大冲击速度的实验数据与理论计算结果较接近,验证本文关于冲击头冲击速度理论模型的正确性和合理性。
4 结果讨论
对于本文设计的静水压力取样器,冲击头的冲击速度越大,冲击力也就越大;另外,冲击速度越大,取样周期越短,取样效率越高。因此,提高取样器冲击头的冲击速度非常重要。
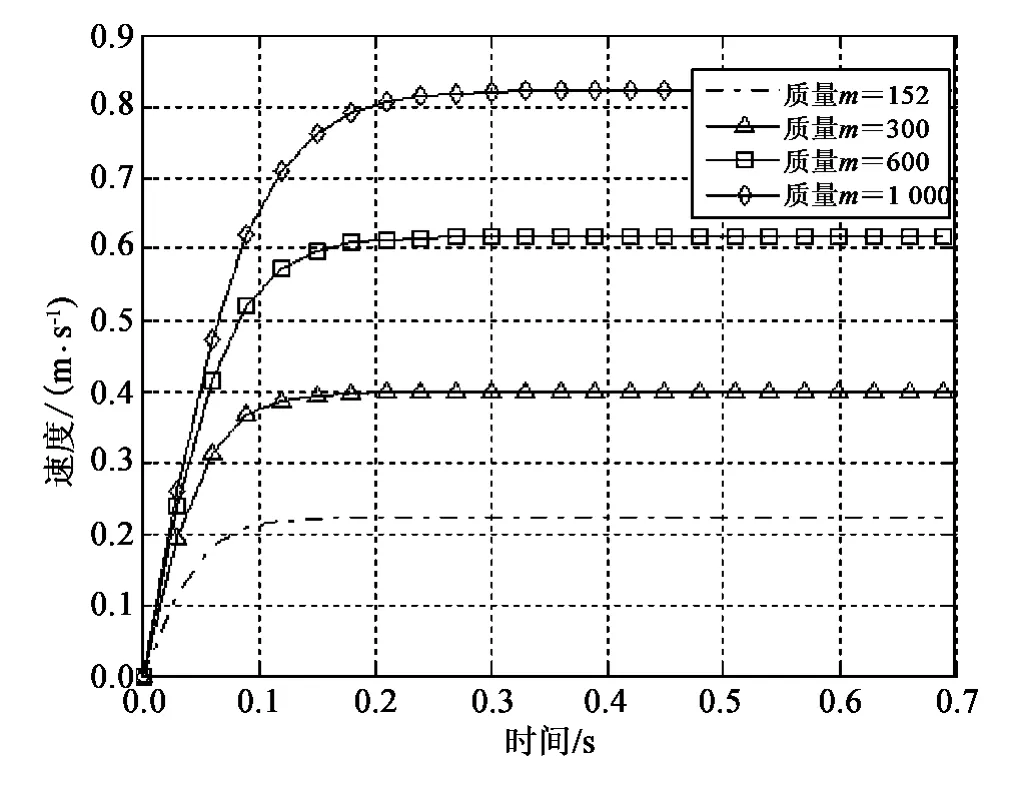
图6 不同冲击头质量下的速度曲线Fig.6 The velocity curves when the quality of the impact head is different
如公式(6)所示,影响冲击头冲击速度的关键因素主要包括:取样器冲击头质量、取样器驱动马达结构和总摩擦力等。本文接下来将对冲击头冲击速度与这几个影响因素之间的关系进行讨论。
1)冲击头质量取值不同,得到冲击头冲击速度曲线如图6 所示。由该图可知:随着取样器冲击头质量增大,冲击头冲击速度也在增大;冲击头速度增大倍数与其质量增大倍数基本成正比关系。因此,在运输、加工和使用条件允许的范围内,应尽量增加冲击头的质量。
2)取样器驱动马达结构中可变参数较多,对冲击头冲击速度影响较大的是各过水截面面积。过水截面面积越大,流量越大,取样器冲击头的冲击速度越大。但由于受到取样器自身体积的限制,单纯增大过水结构截面面积较为困难,因此,本文主要讨论在入水孔和排水孔截面面积不变的前提下,入水孔和排水孔数量改变对冲击头冲击速度的影响。
入水孔和排水孔数量不同,得到冲击头的冲击速度曲线如图7 所示。由该图可知:随着入水孔和排水孔数量的增加,冲击速度增加较快,尤其是数目由1 个增至2 个时,冲击速度增加尤为明显。因此,在强度和加工条件允许的范围内,应适当增加入水孔和排水孔的数量。
3)摩擦阻力不同,得到冲击头的冲击速度曲线如图8 所示。由该图可知:随着总摩擦力减少,取样器的冲击速度增大,但受取样器工作机理及结构设计限制,驱动马达中的密封圈很难进一步减少。因此,实际使用中,在密封条件得到保证的前提下,使用斯特封或格莱圈等密封元件代替O 形圈进行密封,可适当减小摩擦力,增大冲击头的冲击速度。
4)此外,水流在流道中的损失越小,冲击头所获得的动能就越大,冲击速度也越大。因此,应从机械设计和加工的角度,保证各个流道的拐角尽量光滑,从而减小流道损失,增大冲击速度。
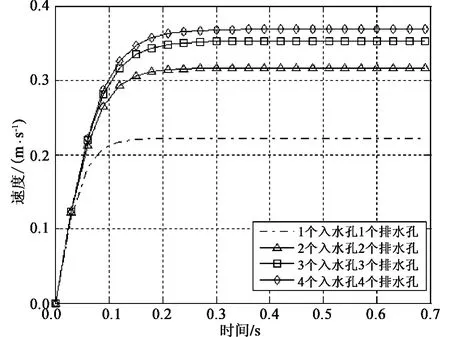
图7 入水孔和排水孔数目不同时的速度曲线Fig.7 The velocity curves when the numbers of inlet and outlet are different

图8 不同摩擦阻力时的速度曲线Fig.8 The velocity curves when the frictional resistance is different
5 结 语
根据对静水压力取样器冲击头冲击速度的理论分析和实验验证,可以得出以下结论:
1)经过理论分析,冲击头从上极限位置下落至下极限位置所需时间为t =0.577 6 s;冲击头下落至下极限位置时的最大速度为v理论=0.221 5 m/s。
2)在取样器冲击实验中,冲击头从上极限位置下落至下极限位置所需时间为t=0.5 s,下落过程中最大冲击速度为v理论=0.194 m/s。
3)随着取样器冲击头质量的增大,冲击头的冲击速度将增大;且冲击头速度增大倍数与其质量增大倍数大概成正比关系。
4)随着入水孔和排水孔数量的增加,冲击头速度增加较快,尤其是入水孔和排水孔数目由1 个增至2 个时,冲击速度增加尤为明显。
5)随着总摩擦力的减少,取样器冲击头的冲击速度将增大。
[1]耿雪樵,徐 行,刘方兰,等.我国海底取样设备的现状与发展趋势[J].地质装备,2009(4):11-16.
[2]补家武,鄢泰宁,昌志军.海底取样技术发展现状及工作原理概述——海底取样技术专题之一[J].探矿工程(岩土钻掘工程),2001(2):44-48.
[3]鄢泰宁,补家武,陈汉中.海底取样器的理论探讨及参数计算——海底取样技术介绍之五[J].地质科技情报,2001(2):103-106.
[4]Brooke J,Gilbert R L G.The development of the Bedford institute deep-sea drill[J]. Deep-Sea Res.,1968,15:483-490.
[5]Selwyn S,McCoy F W.The hydrostatic motor:utilization of hydrostatic pressure differentials in the deep sea[J].Geo. Mar.Lett.,1981,1:233-236.
[6]Yngve Kristoffersen,Eldar Lien,Kjetil Festervoll,et al.The hydrostatic corer selcore—a tool for sediment sampling and geophysical site characterization[J].Marine Geology,2006,229:101-112.
[7]补家武,鄢泰宁,付先成.非可控制式海底取样器的结构及工作原理——海底取样技术介绍之二[J].地质科技情报,2000,19(3):93-97.
[8]盛敬超.液压流体力学[M].北京:机械工业出版社,1980.
猜你喜欢
建筑与装饰(2022年5期)2022-03-17
数学大王·中高年级(2020年6期)2020-06-22
化肥设计(2019年3期)2019-07-02
汽车工程(2019年5期)2019-06-01
汽车与驾驶维修(维修版)(2018年9期)2018-11-15
价值工程(2018年19期)2018-08-29
中国船检(2018年6期)2018-06-22
汽车与驾驶维修(维修版)(2017年12期)2018-01-15
汽车与驾驶维修(维修版)(2017年6期)2017-09-03
山西建筑(2015年23期)2015-04-05