
电动舵机伺服控制器的设计与研究
2013-11-22 07:51赵志刚张庆超
微特电机 2013年9期
赵志刚,林 辉,张庆超,张 韬
(西北工业大学,陕西西安710129)
0 引 言
舵机系统是飞行控制系统中不可或缺的关键组成部分,它的特性优良与否直接影响飞行控制系统的整体性能。电动舵机系统的任务是接收飞行器飞行过程中导航计算机的位置给定信号,并实时、快速、精确地控制飞行器舵面的偏转,使舵面精准地跟踪导航计算机的位置给定信号。所以,舵机系统是一个典型的位置随动系统,舵机控制系统的动静态性能指标直接决定了飞行器的飞行轨迹。
本文介绍了基于TMS320F2812 和三菱公司的智能功率驱动芯片PM75RLA120 舵机伺服控制器,对系统进行了硬件和软件设计。从机械结构到伺服部件和控制器的主控芯片的选择,力求简单、紧凑和可靠。根据其特点及要求精度,采用结合模糊控制规则的抗积分饱和PID 控制器。
1 系统设计
1.1 结构设计
电动舵机伺服控制系统的结构如图1 所示。
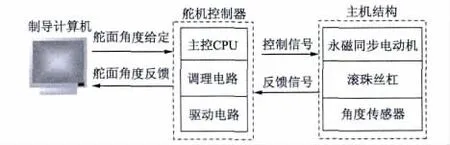
图1 电动舵机控制系统的结构图
舵机系统主要由舵机控制器、PWM 功率模块、伺服电机、减速器、位置传感器等部分组成。整个舵机控制系统接收位置信号控制指令,以及电机反馈电流、速度、舵面偏转角度信号,经过舵机控制器计算,输出控制信号,从而带动舵机伺服电机按一定的规律作动,并经过滚珠丝杠结构至舵机轴输出。这样形成了一个舵机位置闭环的伺服作动系统。
1.2 控制器的硬件整体构成
舵机伺服系统结构如图2 所示。
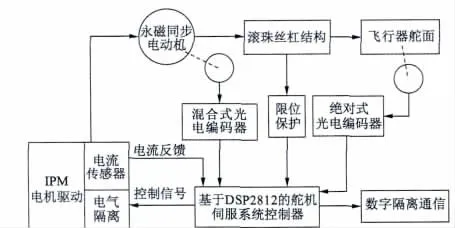
图2 舵机伺服结构框图
从图中得知,硬件电路的设计包括:控制单元电路、隔离驱动电路、IPM 功率模块电路、通信电路以及对各路反馈信号的调理电路。其中,混合式光电编码器有ABZ 信号和UVW 信号,UVW 用于测量转子初始位置,ABZ 用于测量转子角度及电机转速。舵面偏转角度由绝对式光电编码器测得,编码器采用SSI 通信协议,根据系统的控制需要,DSP 的I/O口产生编码器所需的使能和时钟信号,编码器将位置信号以数字量输出给特定的I/O 引脚,通过计算得出位置的绝对角度值。
1.3 控制器的软件整体构成
软件上采用id= 0 控制策略,采用“位置环PID+ 速度环PID + 电流环PID”的控制方法,其中绝对式光电编码器用于位置反馈,转子位置的微分作为速度环的反馈,电机线电流作为电流环的反馈。考虑机械谐振、力矩耦合及电气参数波动等非线性不确定因素的影响,采用结合模糊规则的抗积分饱和的PID 控制器。
2 硬件设计
2.1 硬件结构
舵机控制器的硬件结构框图如图3 所示。
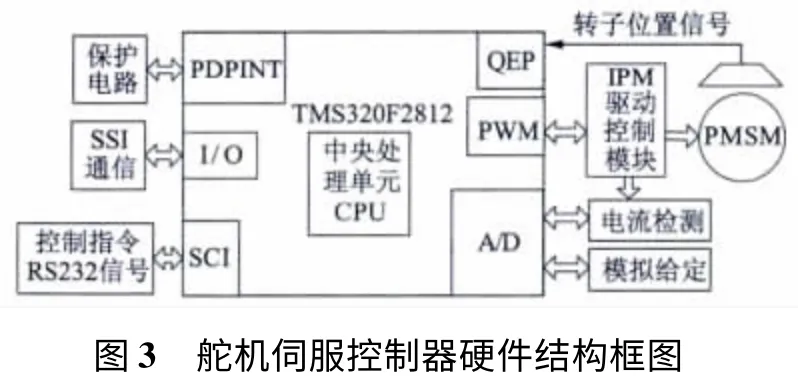
控制器以TMS320F2812 为核心,通过智能功率驱动芯片驱动电机旋转;舵面转角给定可以通过模拟信号给定,也可以通过串口通信给定。
2.2 硬件电路设计
控制器采用TI 公司的TMS320F2812。电机选用永磁同步电动机,它的驱动采用三菱公司的智能功率驱动模块PM75RLA120,并使用专用驱动电源JS159,驱动模块还具有制动控制,以及过电流、过热、欠电压、交叉导通保护等功能。采用ACS758 进行相电流检测,ACS758 的输出端经过减法器限压,可选用巴特沃斯低通滤波器对其进行二阶滤波。
3 软件设计
3.1 系统软件设计流程图
舵机伺服系统采取模块化编程设计,系统分为主程序模块和中断服务程序模块,软件总体结构如图4 所示。
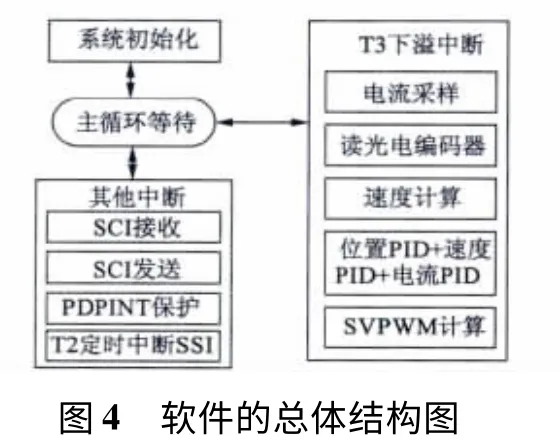
T2 定时中断用于产生编码器所需的使能和时钟信号,并通过I/O 引脚电平计算出位置的角度值。
3.2 在线修正积分项的模糊PID 控制
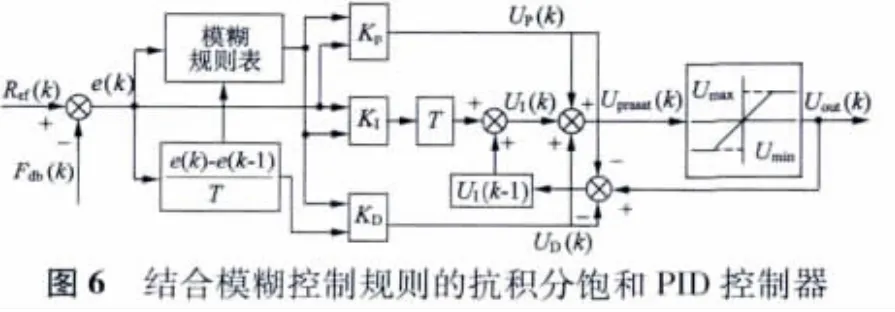
一个PID 控制器可以被称作一个在频域系统的滤波器,不依赖于被控对象的数学模型,对参数变化不敏感。而采用结合模糊规则的抗积分饱和PID 控制器,使得程序调试更具灵活性,系统性能也得到很大提升,控制原理框图及其离散形式的原理图分别如图5、图6 所示。
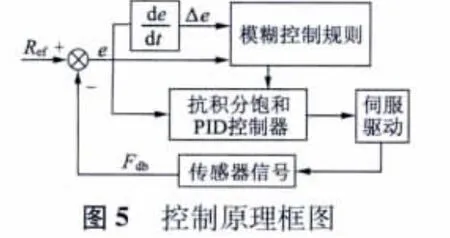
根据所设定的输入和反馈信号,计算实际位置和理论位置的偏差以及当前偏差的变化,并根据模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID 的比例、积分、微分系数。
模糊控制器的输入为误差e、误差变化率Δe,输出量为U,采用相同的的模糊集,隶属函数采用对称、均分、全交迭的三角形。模糊集:e,Δe,U∈{NB,NS,ZO,PS,PB};模糊变量设定为正态模糊变量,其正态函数:
假设基本论域为[a ,b ],论域均取e,Δe,U∈{-4,-3,-2,-1,0,1,2,3,4},采用公式对其进行归一化,论域转化为[-1,1]内。
表1 为得出的模糊控制量U。采用加权平均判别法进行去模糊化,得到U 的实际输出量。
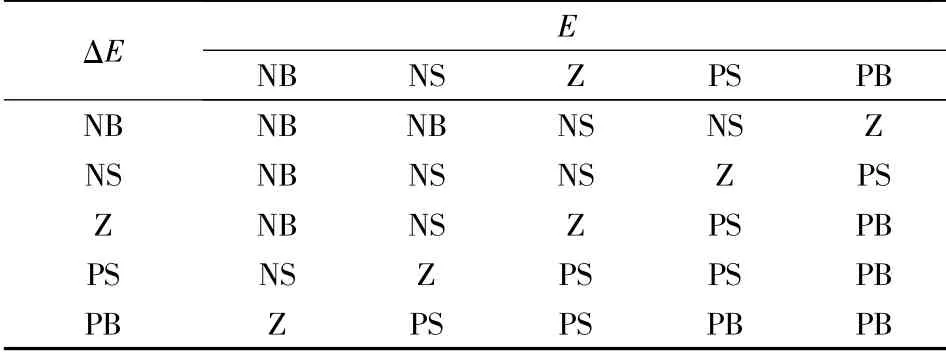
表1 模糊控制量U
本系统与传统抗积分饱和PID 控制器不同,控制器积分项的特别设计避免了抗积分饱和参数的调试,使得参数更易于调节。其离散方程如下:

其中比例项:

在线修正的积分项:

微分项:

下一时刻的积分项:

式中:Uout(k)为PID 控制器输出;e(k)为当前时刻参考变量与反馈变量之间的偏差;T 为控制周期;Kp为比例系数;Kl为积分系数;KD为微分系数。
积分项未饱和时:

积分项饱和时:

或

根据式(5)获取下一时刻的积分项,不会引起积分的长时间累积,使积分项处于未饱和状态。
4 实验结果
控制器实物如图7 所示。
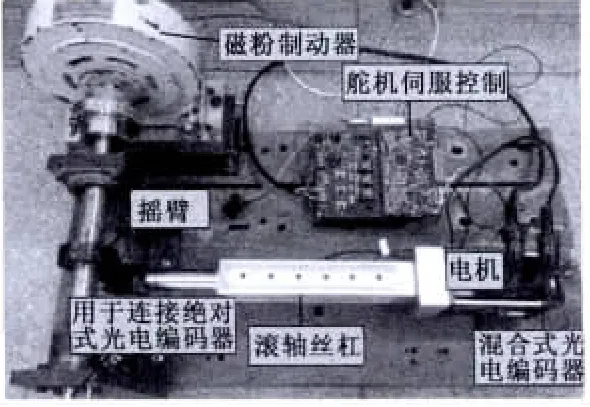
图7 控制器测试实物
给定信号幅值为± 15°、周期为0.5 s 的方波信号,负载为100 N·m,舵机位置跟踪曲线及其稳态误差如图8 所示。
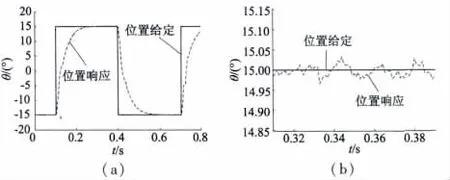
图8 舵机位置跟踪曲线及其稳态误差
舵机伺服系统的最大超调量为0.5°,稳态误差为≤0.1°,满足设计要求。
给定信号幅值为± 15°、周期为0.5 s 的正弦信号,负载为100 N·m,舵机位置跟踪曲线及其动态误差如图9 所示。
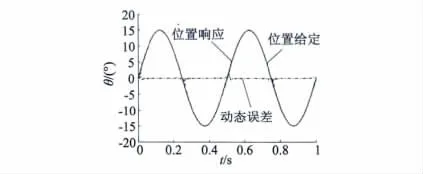
图9 正弦波实验结果
可以看出,系统响应速度快,动态误差≤0.5°,满足设计要求。
5 结 语
本文介绍了整个舵机伺服系统的设计,实现了位置环、速度环和电流环三闭环控制,针对机械谐振、力矩耦合等非线性因素,设计了在线修正积分项的抗积分饱和PID 控制器,并用模糊控制规则对其参数进行调节。实验结果表明,该系统各项性能满足指标要求,具有控制精度高、响应迅速、运行可靠等特点,具有较强的实用价值。
[1] 李兵强,林辉.新型永磁同步电机高精度调速系统[J].中国电机工程学报,2009,15:61-66.
[2] 姬伟,李奇.陀螺稳定平台视轴稳定系统自适应模糊PID 控制[J].航空学报,2007(1):191-195.
[3] Liscouët J,Maré J C,Budinger M.An integrated methodology for the preliminary design of highly reliable electromechanical actuators:Search for architecture solutions[J].Aerospace Science and Technology,2012,22(1):9-18.
[4] Reznik L,Ghanayem O,Bourmistrov A.PID plus fuzzy controller structures as a design base for industrial applications[J].Engineering Applications of Artificial Intelligence,2000,13(4):419-430.
[5] Savran A.A multivariable predictive fuzzy PID control system[J].Applied Soft Computing,2013,13(5):2658-2667.
[6] Karasakal O,Guzelkaya M,Eksin I,et al.Online tuning of fuzzy PID controllers via rule weighing based on normalized acceleration[J].Engineering Applications of Artificial Intelligence,2013,26(1):184-197.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
煤气与热力(2021年12期)2022-01-19
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
西安工程大学学报(2016年6期)2017-01-15
探测与控制学报(2015年4期)2015-12-15
舰船科学技术(2015年8期)2015-02-27
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
