
折叠翼变体飞行器非定常气动特性实验研究
2013-11-20 10:11袁明川史志伟程克明
实验流体力学 2013年6期
袁明川,史志伟,程克明
(南京航空航天大学 航空宇航学院,南京 210016)
0 引 言
变体飞行器可以在飞行中改变自身的气动构型,实现机翼面积、后掠角、展弦比等的大尺寸范围的变化,从而使飞行器可以在变化很大的飞行环境下和在执行多种任务时始终保持良好性能[1-3]。随着科学技术的发展和如今对飞行器在复杂环境下飞行以及执行多任务的要求,变体飞机的构想愈加受到世界各国的重视。1985~1992年美国开展了主动柔性翼(A F W)计划,并于1996 年后扩展为主动气动弹性机翼(AAW)计 划[4]。2003 年,美 国 国 防 预 研 计 划 局(DARPA)正 式 启 动 了MAS (Morphing Aircraft Structures)研究计划,提出了折叠机翼、滑动蒙皮机翼和伸缩机翼的设计方案,变体飞机的研究取得了许多实质性的进展[5-6]。与此同时,欧洲也启动了由多个单位合作的3AS (Active Aeroelastic Aircraft Structures)计划,将变体飞机的研制列入了研究日程,国外其他多所大学也纷纷开展了不同形式变体飞机的设计研究[7-11]。近几年来,国内的相关高校和科研机构多次进行了变体飞行器驱动、控制研究和气动特性的数值模拟工作,取得了一定的成果。
折叠机翼变体飞行器可以通过部分机翼的折叠运动改变飞机的机翼面积、高低位置、平面形状、展弦比和后掠角,实现飞行器气动外形的改变。研制出了一种能够实现机翼可控折叠变形的飞行器的实验模型,通过风洞实验获得了模型在不同的变体位置下的气动参数和流场分布以及它在变体过程中气动参数和流场的动态变化情况,总结出了变体飞行器静态和动态下气动特性的变化规律,并对其进行了简单的流动机理的探究。研究结果可为变体飞行器的气动设计提供一定的参考依据。
1 实验模型结构和驱动
折叠翼变体飞行器实验模型采用后掠式机翼,无平尾和垂尾。机翼由两部分组成:与机身相铰接的内侧机翼;与内侧机翼相铰接的外侧机翼。外侧机翼、内侧机翼、机身和连杆组成平行四边形机构,从而使内侧机翼绕机身转动时,外侧机翼与机身平面始终保持水平[12-15]。驱动器采用高精度伺服舵机,工作时利用计算机控制机翼做相应的变体运动。模型机翼完全展开时为近似三角翼布局,机翼展长l=0.6m,展弦比λ=3.12,后掠角χ1/2=17.5°;机翼完全折叠时展长l=0.36m,展弦比λ=2.06,后掠角χ1/2=26°。文中用θ表示内侧机翼的折叠角度,θ=0°表示机翼处于完全展开状态,θ=120°表示机翼处于完全折叠状态。图1为折叠翼飞机模型在不同变体状态下的照片。

图1 不同变体状态下的模型照片Fig.1 The model photos with different morphing position
2 实验仪器和实验方法
实验风洞为低速回流式开口风洞,最高风速40m/s,风洞最大湍流度0.07%,实验段长1.7m,横截面为1.0m ×1.5m 的矩形。气动力与力矩测量采用六分量杆式天平。
折叠翼变体飞行器模型的风洞实验在10m/s的风速下进行,实验主要分为三个部分:(1)静态测力实验:测得模型在不同变体位置下的气动力和力矩;(2)动态测力实验:实验时模型做匀速变体运动,测得模型在不同的迎角、变体速度下气动力和力矩的动态变化情况;(3)PIV 流场测量实验。
在进行数据处理工作时,不考虑变体运动对重心位置的影响,模型重心位置取为一个固定的点,参考面积S、展长l和平均气动弦长bA取模型做变体运动时的实时变化值。相应的气动系数计算公式为:

式(1)中,q∞表示来流动压,S(θ),l(θ),bA(θ)分别表示模型的机翼在不同折叠角度下的投影面积、展长和平均气动弦长。
考虑到动态测量时存在干扰信号,因而对数据进行了滤波处理。图2为气动特性动态变化曲线在数据滤波前后的一个对比。在动态实验时,首先测量了无风状态时机翼动态运动的天平数据,然后进行了有风状态时的动态气动力测量,用有风数据减去无风数据,去除惯性影响。同时,在动态实验时,共采集了6个周期的数据测量值,并对实验结果进行了平均值处理。
3 实验结果与分析
3.1 静态测力实验结果
图3(a)~(c)为折叠翼变体飞行器模型静态实验的气动特性曲线。通过对这些曲线的观察,得到了以下的规律:随着机翼折叠角度θ的增大,模型失速临界迎角从16°增大到22°;在θ=90°后,升力线斜率变小;升阻比在θ=0°时最大,在θ=120°时最小;θ=120°时模型焦点后移,纵向静稳定性有所增大。总的来说,模型在机翼展开时的低速气动特性要优于折叠状态的气动特性。
出现以上现象的原因可能是:θ增大时模型的展弦比减小,下洗作用增大,造成有效迎角减小,从而使得失速迎角增大;θ达到90°后,模型机翼运动至机身上方,模型内、外侧机翼和机身部分相互影响,使得阻力系数增大,升力系数减小,同时机翼位置变化使得前缘涡对机翼影响减弱,这些都会造成升力线斜率的下降。
图4是6°迎角下偏航力矩系数随侧滑角变化曲线,曲线的斜率在θ=90°时明显大于其它的偏转角度,这说明此时模型具有最大的航向稳定性。这是因为当θ=90°时,模型内侧机翼竖起,可以充当垂直安定面,从而使得偏航稳定性增大。
3.2 动态测力实验结果
图5是模型的纵向气动特性曲线,观察升力特性曲线,可以看出θ在90°之前,机翼进行折叠运动时的升力系数Cy明显小于进行展开运动时同一θ下的升力系数Cy。迎角α为8°时这个最大差值大概相当于自身升力系数的12%,α达到18°时模型失速,这个差值达到22%。这说明机翼进行折叠运动时产生了比较明显的非定常气动现象,而且失速前后这种现象更加的强烈。比较图6中不同的折叠速度下模型升力系数的动态特性,可以看出模型折叠运动的速度越大,非定常效应越明显。
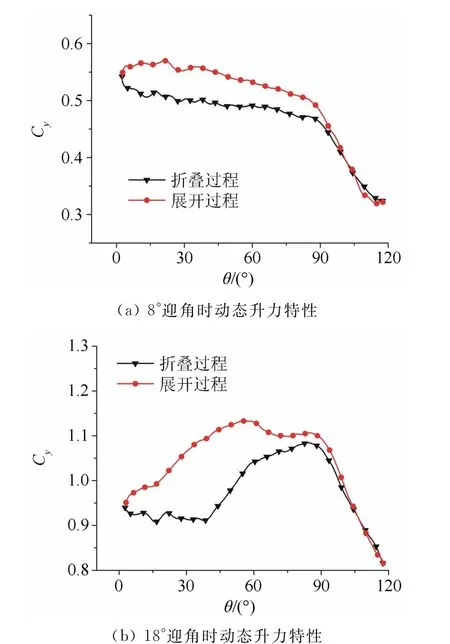
图5 不同迎角下变体运动对模型纵向动态气动特性影响(ω=90°/s)Fig.5 The effects of the morphing motion on the longitudinal aerodynamic characteristics at different angle of attacks(ω=90°/s)
出现这种非定常现象的原因可能是以下两个:模型机翼对来流的相对运动速度造成有效迎角发生改变;模型的变体运动对它周围流场特别是前缘集中涡的影响。

图6 变体速度对动态气动特性的影响(α=18°)Fig.6 The effects of morphing speed on the unsteady aerodynamic characteristics(α=18°)
分别对这两个因素进行简单的分析。首先,实验中模型机翼进行的变体运动会对来流产生一个相对运动速度,这个相对速度使得同一θ下折叠过程有效迎角小于展开过程,从而造成升力系数和阻力系数的变化,这个因素在小迎角时起主要作用。对于第二个因素,模型机翼的展开运动会造成机翼下方的气流向上翻卷,从而增大了前缘涡,前缘涡可以产生非线性涡升力,延缓机翼的失速,有利于升力的增加,这个因素在大迎角时发挥主要作用。在这两个因素共同作用下模型的升力特性呈现如图5所示的动态变化规律。
图7为偏航角β=20°时折叠翼模型航向气动参数的动态变化情况。从两幅图中可以看出,机翼折叠和展开时侧力系数曲线和偏航力矩系数的曲线在折叠角度θ=90°之前基本重合在一起,没有十分明显的非定常气动现象产生,在折叠角度θ=90°之后,机翼展开和折叠时的曲线并不重合开始有非定常气动现象产生。这是因为θ=90°时模型内侧机翼竖起充当了侧向的主要受力面,在它的运动下产生非定常的气动特性。
3.3 PIV 实验结果
PIV 实验对12°迎角下机翼后方5cm 处截面进行流场测量。图8和9分别是静态和动态情况下流场的变化情况,流场图由涡量云图和速度矢量图构成,图中粗线表示机翼位置。
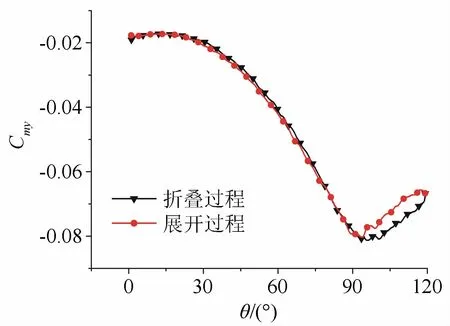
图7 变体运动对横航向气动特性影响(α=6°,β=20°)Fig.7 The effects of the morphing motion on the lateral aerodynamic characteristics(α=6°,β=20°)
图8(a)~(c)是静态情况下θ分别为0°、30°和120°时的流场分布,可以看出前缘涡随着机翼折叠状态的改变而转移,当机翼折叠起来时前缘涡基本消失。
图9是动态情况下θ=30°时机翼折叠过程和展开过程流场分布的对比,相对于折叠运动状态,机翼的展开运动使得前缘涡增强,且前缘涡的位置向翼根方向移动。流场分布的这些变化和前文中气动特性的变化是一致的。

图9 变体运动过程中的流场变化(θ=30°)Fig.9 The change of flow field in the morphing motion
4 结 论
通过对折叠机翼模型在静态和动态过程中的气动特性实验结果进行分析,并结合PIV 测量结果,可以得出以下结论:
(1)对于折叠翼变体飞行器,静态情况下模型展开时的低速气动特性优于折叠起来的状态;
(2)折叠翼变体飞行器模型变体运动过程中有明显的非定常效应,失速迎角前后非定常效应更加明显;
(3)变体运动速度越大,非定常效应也越明显; (4)非定常气动效应产生的原因主要是机翼相对于来流运动和机翼变体过程中对前缘集中涡的影响。
[1] WILSON J R.Morphing UAVs change the shape of warfare[J].Aerospace America,2004,42(2):28-29.
[2] JASON Bowman,BRIAN Sanders,BRYAN Cannon,et al.Development of next generation morphing aircraft structures[R].AIAA 2007-1730,2007.
[3] THOMAS G Ivanco,ROBERT C Scott,MICHAEL H Love,et al.Validation of the Lockheed Martin morphing concept with wind tunnel testing[R].AIAA 2007-2235,2007.
[4] PENDLETON E,GRIFFIN K E,KEHOE M W,et al.A flight research program for active aeroelastic wing technology[R].AIAA 1996-574-CP,1996.
[5] RODRIGUEZ A R.Morphing aircraft technology survey[R].AIAA 2007-1258,2007.
[6] FLANAGAN1 J S,STRUTZENBERG R C,MYERS R B,et al.Development and flight testing of a morphing aircraft,the Next Gen MFX-1[R].AIAA 2007-1707,2007.
[7] BLONDEAU J,RICHESON J,PINES D J.Design,development and testing of a morphing aspect ratio wing using an inflatable telescopic spar[R].AIAA 2003-1718,2003.
[8] HONG C H,CHEPLAK M,CHOIJ Y,et al.Flexible multi-body design of a morphing UCAV[R].AIAA 2004-6595,2004.
[9] GARCIA H M,ABDULRAHIM M,LIND R.Roll control for a micro air vehicle using active wing morphing[R].AIAA 2003-5347,2003.
[10]ABDULRAHIM M.Flight performance characteristics of a biologically-inspired morphing aircraft[R].AIAA 2005-345,2005.
[11]NEAL D A,GOOD M G,JOHNSTON C O,et al.Design and wind-tunnel analysis of a fully adaptive aircraft configuration[R].AIAA 2004-1727,2004.
[12]李强,李周复,刘铁中.折叠变体飞行器风洞试验模型研发[J].机械设计,2010,27(5):21-24.
[13]乐挺,王立新,艾俊强.Z型翼变体飞机的纵向多体动力学特性[J].航空学报,2010,31(4):679-686.
[14]朱华,刘卫东,赵淳生.变体飞行器及其变形驱动技术[J].机械制造与自动化,2010,39(2):8-14.
[15]桑为民,陈年旭.变体飞机的研究进展及其关键技术[J].飞行力学,2009,27(6):6-9.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年6期)2021-07-20
空间科学学报(2020年4期)2020-04-22
科学Fans(2019年4期)2019-04-30
小型微型计算机系统(2018年6期)2018-07-04
计算机系统应用(2017年10期)2017-10-20
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2016年3期)2016-02-27
科技传播(2014年4期)2014-12-02
少年科学(2014年7期)2014-08-18
