
双轴光伏跟踪机械系统设计
2013-11-18 13:23:30袁汇江张学梦
潍坊工程职业学院学报 2013年4期
袁汇江,张学梦
(潍坊科技学院,山东 寿光 262700)
引言
为了应对能源枯竭,人们对太阳能以及核能、风能、地热能、水力能、生物能等可持续能源的利用日益迫切。据统计[1],20 世纪90 年代,太阳能发电每年增长达20%。太阳能作为新能源的重要组成部分,因其具有取之不尽、用之不竭、无污染等特点,在开发利用中蕴藏着巨大的市场前景,越来越受到人们的青睐。[2]本文所介绍的太阳能跟踪系统则是光电转换的一种。
1 现有光伏跟踪装置工作性能分析
光伏跟踪机械系统按照旋转轴数的不同跟踪系统可以分为单轴跟踪系统和双轴跟踪系统。单轴太阳能跟踪系统比固定式系统的功率输出可以提高25%,而双轴太阳能跟踪系统比固定式系统功率输出可以提高4l%。[3]光伏跟踪系统的成本关系到制造成本、获得发电量以及结构设计上的因素,因此现在的太阳能跟踪系统一般采用双轴跟踪系统。
双轴跟踪一般包括两种方式,分别为高度-方位角式全跟踪和极轴式全跟踪。本文基于高度-方位角式跟踪方式,在给定发电模组及系统设计参数的基础上,对双轴光伏跟踪机械系统的设计进行研究。
2 光伏跟踪机械系统总体设计
2.1 发电模组及系统设计参数(见表1)
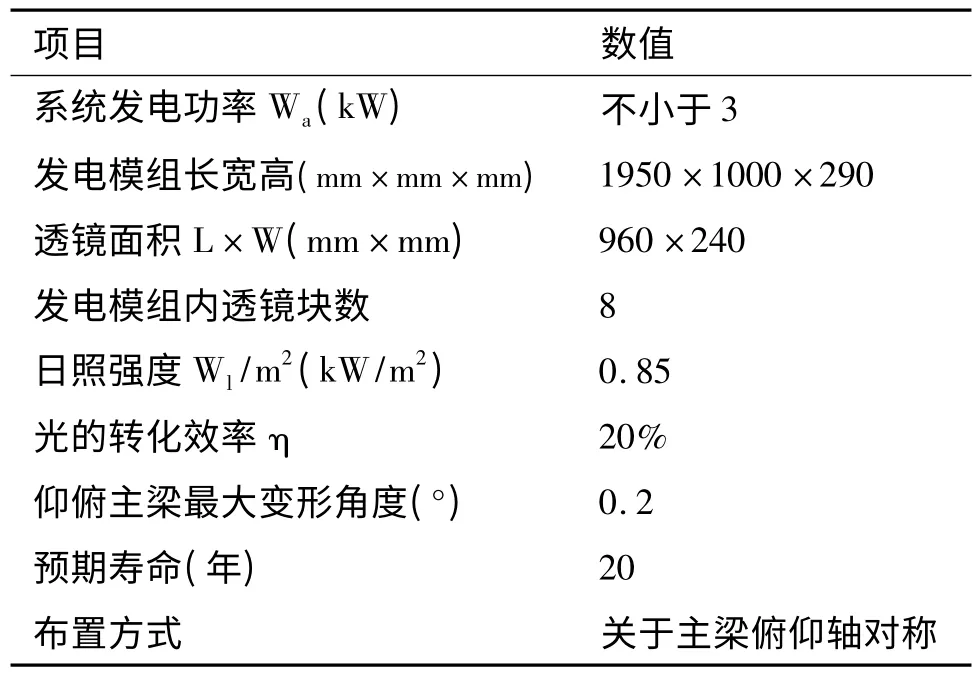
表1 发电模组及系统设计参数
2.2 确定发电模组块数
设所需发电模组的数目为SL,则理论上需要发电模组的数目SL为:

考虑到发电模组受风载的影响,应布置模组使其关于主梁和方位轴对称,选择发电模组的数目为10,则系统的理论发电量为:Wd=Wi·η·(L·W·8)·SL=0.85 ×0.2 ×(0.96 ×0.24 ×8)×10=3.1334(kW)
2.3 确定布置方式
根据发电模组的长度和宽度,考虑布置的对称性,选择宽长比接近0.618 的布置方式。
在进行风载计算时取总发电模组的长度为5 米,宽度为4 米;而当跟踪装置的高度角为0°时,总发电模组最下端离地面的距离至少为1 米,因此取图布置方式(2)中主梁至地面的距离L=3.5 米(见图1)。

图1 布置方式
2.4 跟踪系统总体设计
(1)方位角跟踪机构:本设计初步确定选择步进电机+行星减速机+齿轮副传动实现方位角的跟踪。
(2)高度角跟踪机构:本设计初步确定选择步进电机+行星减速机+齿轮副传动实现高度角的跟踪。
(3)光伏组件支架:选择标准件槽钢用于支承光伏组件,选择圆管用于支承和仰俯轴连接,且同时支承光伏组件及其槽钢。
(4)支承立柱:本设计初步选择为圆管支承方位角跟踪机构的回转装置。
3 光伏跟踪机械系统风载计算
3.1 风速确定
通过对近20 年的风速记录进行分析计算,得到以下计算结果(见表2)。其中¯X 为风速的平均值,σ为风速的根方差值,ψ 为保证系数,P0为不超过设计最大风速的概率。

表2 近20 年风速记录分析结果表
由表2 可以看出,20 年出现的最大风速为17.0132m/s;20 年内的极大风速为26.6m/s,平均风速为3.22m/s。本文在计算所需要的静力和静力距时,取设计风速和破坏风速分别为17 m/s 和27 m/s。
3.2 风载计算公式
平均风产生的阻力Fx、升力Fy、侧力Fz、滚转力矩Mx、方位力矩My 和仰俯力矩Mz 的计算公式如下:

式中,Cx、Cy、Cz、Cmx、Cmy、Cmz 分别为阻力系数、升力系数、侧力系数、翻滚力矩系数、方位力矩系数和仰俯力矩系数。
3.3 系数的选择
3.3.1 仰俯力矩系数的确定
上面公式中的仰俯力矩系数在坐标系yoz 的轴oz 位于总发电模组的底部时成立,而在本设计中,平板中间横轴的仰俯力矩系数Cmzz 为:

3.3.2 风载系数的选择
根据参考文献[4]可知,当高度角为0°时,方位角变化时,阻力系数Cx、侧力系数Cz、方位力矩系数Cmy 和仰俯力矩系数Cmzd 如图2 示。

图2 风载系数随方位角的变化
根据公式(7)计算仰俯力矩系数Cmzz 如图3 所示。
3.3.3 阻力的计算
根据参考文献[4]可知,当方位角和高度角都为0°时,系统对风具有最大的阻力。


图3 仰俯力矩系数随方位角的变化

3.3.4 倾覆力矩的计算
在风的作用下,跟踪机构有倾倒的趋势。根据已有资料,当方位角为0°时,风对跟踪机构具有最大的倾覆力矩。MT=Fz·L+Mz

3.3.5 回转力矩的计算
当高度角为0°,方位角变化时,阻力Fx、侧力Fz和方位力矩My,都会产生回转力矩,但阻力和侧力的贡献很小,这里直接以方位力矩My 简单计算回转力矩Mh:

3.3.6 俯仰力矩的计算
总发电模组关于主梁对称布置,方位角为0°,高度角变化时,阻力和升力对O 点不产生力矩,则俯仰力矩Mz 为:

4 跟踪机构动力设计与结构设计
4.1 方位角跟踪机构动力设计
高度角跟踪机构、发电模组、发电模组支承支架都安装在方位角跟踪机构之上,随着方位角跟踪机构的转动部分一起转动。故估算系统相对方位旋转轴的转动惯量为Ixy=2.9590 ×109(Kg·mm2)。
驱动机构选择为步进电机+行星减速器+齿轮副传动。由于跟踪系统负载惯量大,步进电机拟选择为加减速运行模式,如图4 所示。
由于采用加减速运行模式,必要转矩包括加风载和加减速转距,系统负载转矩主要包括系统传动间的摩擦及外界风载等的影响。
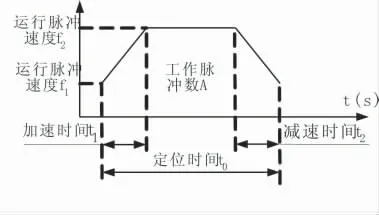
图4 步进电机加减速运行模式
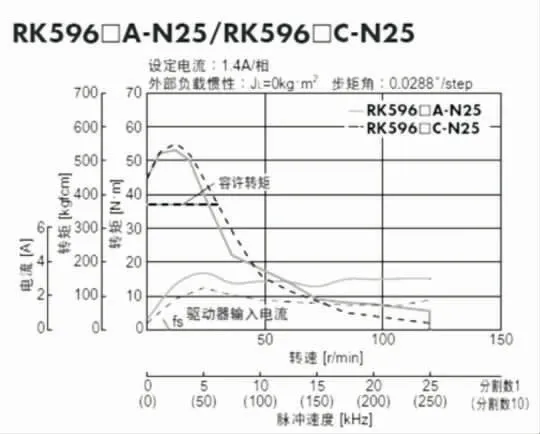
图5 步进电机转速转矩曲线
图5 为步进电机转速转矩曲线,由此得到步进电机的工作状态Zt=2.5%,远小于50%,且由于惯性比≤10,所设计符合要求。
最后通过以上设计过程计算出行星减速器输出扭矩,选择减速比为i2=16,额定输出扭矩Tx=235 N·m 的PX115 行星减速器。
4.2 高度角跟踪机构动力设计
高度角跟踪机构与方位角跟踪机构在设计原理上是一样的,驱动机构选择为步进电机+行星减速器+齿轮副传动。步进电机仍然选择加减速运行模式,如图4 所示。不同的地方在于高度角齿轮副传动中传动比i3=10。
按照方位角跟踪机构动力设计过程对高度角跟踪机构进行动力设计。最后通过以上设计过程计算出行星减速器输出扭矩,同样选择减速比为i2=16,额定输出扭矩Tx=235 N·m 的PX115 行星减速器。
4.3 光伏发电模组支承支架设计
考虑到圆管便于加工,具有较大的截面惯性距,因此总发电模组支承支架的主梁选择为圆管。当总发电模组及支架总重量为1500Kg,D=0.146m,h=0.012m 时,计算得A 点的转角为0.237°,此时的挠度为8.53mm。A 点的支反力为7.5KN,弯距为10.3 KN·m。
得到初始设计的圆管直径和厚度后,对其进行弯曲应力校核和剪切应力校核。经计算校核,选择的20 号钢制圆管满足安全条件,设计合理。
4.4 仰俯运动仰俯轴设计
该轴无特殊要求,因而选用调质处理的45 钢。按照扭转强度条件估算轴径,并考虑到轴上键槽等影响因素,因而将轴的直径增大5%并圆整,计算并确定直径为60mm。根据轴上主要零件的布置和轴的初步估算定出的轴径,进行轴的结构设计。
4.5 方位角齿轮传动设计
根据已知条件,大、小齿轮均可选用调质处理的45 钢,硬度为229-286HBS,并可查得弯曲疲劳极限应力σFlim=270MPa,接触疲劳极限应力σHlim=605MPa 。
4.5.1 按轮齿弯曲疲劳强度设计

4.5.2 确定许用弯曲应力
齿轮的许用弯曲应力计算公式为

带入数据计算得:σFP=506.25MPa
4.5.3 确定转矩
4.5.4 初步选定齿轮参数
取z1=20,传动比i=12,则取齿宽系数ψd=0.5,载荷系数K=KAKVKβKα,通常可近似地取K=1.3-1.7,此处取k=1.5。
4.5.5 确定复合齿形系数
YFS1=4.68
4.5.6 确定模数m
4.5.7 计算几何尺寸
结束语
本文对双轴光伏跟踪机械系统的设计及运行进行了仿真,确定了总发电模组的个数和布置方式,分析并计算了总发电模组的风载。在此基础上,对双轴光伏跟踪机械系统进行了方位角和高度角跟踪机构动力设计,系统主要零部件结构设计,并可基于Pro/E 进行系统运动仿真。
在考虑成本的情况下,双轴光伏跟踪机械系统进行设计时,应详细了解市场上成熟的步进电机,减速器的性能及其价格,在充分减低成本的情况下进行方位角和高度角跟踪机构动力设计。
[1]王炳忠.太阳能——未来能源之星[M].北京:高教出版社,1990:20-21.
[2]陈建彬,沈惠平,等.太阳能光伏发电二轴跟踪机构的研究现状及发展趋势[J].机械设计与制造,2010,(8):264-266.
[3]SALAH ABDALLAH.Two axes sun-tracking system with PLC control[J].Energy conver sion and management,2004,(45):1931-1939.
[4]张旭东,何海鸿,陈明凯,等.太阳能光伏发电系统的双轴跟踪器设计[J].科技促进发展,2008,(11):10-11.
猜你喜欢
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
电子制作(2019年12期)2019-07-16 08:45:20
电子制作(2018年8期)2018-06-26 06:43:10
电子测试(2017年11期)2017-12-15 08:57:38
制造技术与机床(2017年8期)2017-11-27 02:10:12
凿岩机械气动工具(2017年3期)2017-11-22 07:21:29
照明工程学报(2016年3期)2016-06-01 12:18:01
河南科技(2015年18期)2015-11-25 08:50:14
焊接(2015年9期)2015-07-18 11:03:52
