
GPS技术在公路工程测量中的分析及应用
2013-11-15 07:35:18曹康健
中国测试 2013年4期
曹康健
(中山大学遥感与地理信息工程系,广东 广州 510275)
0 引 言
随着测量技术向数字化测量方向发展,测量数据采集与数据处理向数字化、自动化、实时化发展,同时在测量技术引入了新的网络技术、GPS技术、GIS技术等,使得测量数据管理更科学化、标准化、规格化,测量数据传播与应用更网络化、多样化、社会化。GPS应用在隧道贯通工作中,可提供稳定性、方便性等保障[1],特别是在特长隧道中的应用。
本文以铁北山隧道作为研究样例,对该隧道GPS平面控制网进行测量研究,在实施处理过程中通过对GPS定位、GPS数据采集后数据精度处理来分析该技术在隧道贯通平面控制测量方面的实际应用方法与过程,为后期利用GPS技术进行隧道贯通平面控制测量提供帮助。
1 GPS原理
1.1 GPS定位原理
在GPS技术中,用户GPS客户端是通过对接收卫星发送的星历参数和时间信息进行计算,然后得出客户端所在的三维位置、三维方向、运动速度和时间信息。而在基于GPS的导航系统中,其总体原理是通过计算已知具体位置卫星到用户端间的记录,然后通过多颗卫星实现客户机具体定位。卫星的位置信息可以通过星载时钟所记录的时间在卫星星历计算即可获取,卫星与客户间的距离可以通过光速乘时间得到。GPS卫星启用后,以1和0二进制码元组成的伪随机码进行发射导航电文,伪随机码一分为民用的C/A码和军用的P(Y)码,C/A码频率1.023MHz,重复周期 1ms,码间距 1μs,相当于 300m;P 码频率 10.23MHz,重复周期 266.4d,码间距 0.1μs,相当于30m。C/A由于民用,其保密性和安全性相对比较差;P(Y)为军用专属,其保密性很高。在导航电文内容中,星历数据在实际定位中起到关键的作用,客户机通过计算出客户与卫星间的距离,然后结合导航电文中的卫星星历数据推算出卫星发射电文时所处位置和用户在WGS-84大地坐标系中的位置速度等信息,即通过四维坐标 x、y、z,Δt来实现精确定位,Δt为卫星与接收机之间的时间差。
1.2 GPS测量指标计算
1.2.1 外业数据质量检核
(1)采用点观测模式时,不同点必须采用不同基线、同步环和异步环的数据检验,且同一时段观测值的数据变化不能超过10%。
(2)A级GPS网观测数据的检核必须按照A级要求执行。同时GPS的B、C、D、E级GPS网基线长度较差必须满足[2]:

式中:σ——基线测量中误差,mm。
(3)对于 B、C、D、E 级 GPS网基线测量误差 σ,其差值必须满足外业测量时的标称精度,其边长按实际平均边长计算。
(4)B、C、D、E 级 GPS网同步环闭合差必须符合相关要求,同时GPS网外业基线中的独立闭合环或符合路线坐标闭合差Ws和各坐标分量闭合差(WX、WY、WZ)应该满足[3]:

式中:n——闭合环边数;
σ——基线测量中误差,mm。
其计算按规定执行:

1.2.2 GPS网平差
(1)A、B级GPS网无约束平差
1)对外作业根据实际情况进行无约束平差,对于存在联合无约束平差时,通过引入若干系统误差参数和显著性检验进行处理。
2)无约束平差应进行方差分量因子估值检验和每个改正数粗差的检验。
3)进行无约束平差计算时,需要输入2000点的地心坐标、基线改正值、基线向量平差值等数据。
(2)A、B级GPS网整体平差
1)整体平差应在2000国家大地坐标系或国际地球参考框架(ITRF)中进行。各子网历元不同时,应利用板块运动模型和速度场进行统一归算,并通过起算点的全方差-协方差阵和松弛因子定权来进行整体平差计算。
2)整体平差应进行验后单位权方差因子的检验和转换参数的显著性检验。检验后,应消去不显著的转化参数,并重新平差。
(3)C、D、E级GPS网无约束平差
1)在满足以上条件的情况下,再以三维基线向量及其相应方差-协方差阵作为观测信息,进行无约束平差。
2)无约束平差中,(VΔX、VΔY、VΔZ)关系必须满足[4]:

式中:σ——基线测量中误差,mm。
(4)C、D、E级GPS网约束平差
1)利用无约束平差后进行三维约束平差或二维约束平差。通过已知坐标、距离、方位进行加权约束。同时平差结果必须包括各类型坐标、基线向量改正数及其相应的精度。
2)约束平差中,基线分量改正数必须与粗差剔除后的无约束评查结果为同一基线,其改正值关系必须满足[5]:

式中:σ——基线向量中误差,mm。
2 控制网
2.1 GPS控制网内业设计
2.1.1 GPS控制网设计
在进行GPS测量前,需要进行GPS控制网的设计,其设计必须满足客户要求以及GPS控制网测试规范要求。在进行GPS控制网设计时必须考虑如下4 个原则[6-7]:
(1)GSP控制网应用范围。不仅要考虑近期的设计需求与规划,同时要考虑控制网在未来施工需求以及控制网的可扩展性。
(2)控制网必须采用层级设计。一般情况下,控制网设计采用分布式即可,但对于大型城市管理必须采用层级结构来保证控制网的未来可扩展性。一般情况下,首级网GPS各点间距离大于5 km,中级在1~5km间,三级在1km以内。同时为了保障各级控制网的稳定性,必须采用独立的GPS基线向量构成闭合图形网,不允许有支线。
(3)对于GPS测量准确度,必须符合表1中的要求。
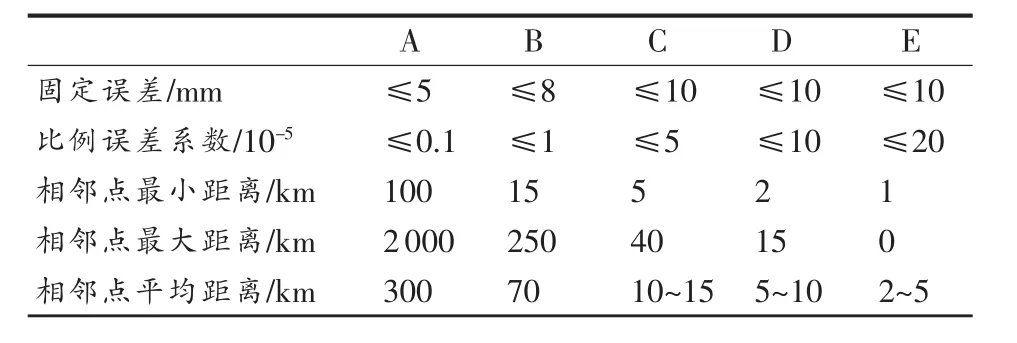
表1 GPS测量准确度
(4)对于坐标系和起算数据的选择。在小区GPS网采用基准时用给定的起坐标进行确定,方位基准采用基于地面电磁波测距边进行确定。
2.1.2 影响GPS测量技术因素分析
对于GPS测量技术设计影响因素一般有4个,首先是网点分布密度与布网方案,然后是GPS观测卫星数与质量,接着是GPS信号接收的精密度和接收信号质量与稳定性,最后是接收机数量与运行稳定性。
2.1.3 GPS控制网的图形设计
GPS控制网图形设计必须要保证其灵活性与扩展性。因此小区的点要便于低等级常规测量的使用,点与点之间必须要保障一个控制点通视,对于点位间的距离,采用直接联测进行小间中距相邻位联测;对于GPS网点各同步边采用闭合环,同时采用平差进行等级检验;为了实现坐标系转换,采用测区内国家、地方测设的三角点进行联测,同时要保正其测试点里外均匀分布。
2.2 GPS控制网的外业设计
2.2.1 GPS隧道控制网选点要求
控制网测量是平面控制和高程控制测量的总称,在进行工程规划设计时,首先要进行地形测图控制网来控制整个测区;施工时也需要建立施工控制网,以便控制工程的总体布置和各建筑物轴线之间的相对位置,满足施工放样的需要;在进行观测时,也需要建立观测控制网,以对建筑编写观测。在各个阶段的控制网中其布网方式、测试精度都不同,一般是依次建立或者在原有网的基础上改建,这样是为了控制工程的位置和尺寸[8]。
2.2.2 GPS控制网网型设计
(1)对于隧道GPS网的设计,采用独立基线构成闭合图形,以及控制点间通过同步环或异步环相联,在空间上构成三角形或者四角形来加强控制网强。在整个控制网中不能有游离基线以及基线数不能过多,否则会影响求闭合差的计算结果。
(2)在该控制网中,每个GPS点都必须要有3条独立基线,其观测时每个点至少要观测两个时段。采用3条独立基线是为了保障该GPS点的可靠而设置。
(3)在进行GPS网观测时,最好选择具有5颗以上卫星的信号时段,因为观测时段的选择将直接影响到精度衰减因子(DOP)值,同时在进行实际观察时,其GDOP(几何精度衰减因子)不能出现陡然变化的情况。
2.2.3 控制网布设的一般过程
控制网布设准备工作主要是进行相关资料收集,了解观测区域的地理位置、现状大小以及观察时需要多少精度、控制点摆放位置、控制点布设密度等信息,这些信息为确定布网方案、设计和施测做好准备工作。然后根据采集到的数据信息进行方案确定,其主要考虑:布设独立网还是使用现有网,测量时采用三角测量还是三边测量,是全面布设还是分区布设等,按照此方案能否实现判断点与点之间的正常通信等。
3 GPS隧道控制测量实例
隧道控制测量的作用是为了减少当进行隧道多面相向开挖贯通误差,隧道洞外控制测量的精度直接影响到隧道施工安全和工程质量。
3.1 工程概况
隧道是以沈抚高速公路隧道作为工程实例,其中有个工程包含两个隧道:一号隧道和二号隧道,长度分别为1270m和640m,设计高度为7.8m。测区植被覆盖高,森林茂密。
3.2 布网设计
在隧道的一端,设置一个高等级的GPS点,该GPS点作为其他未知点计算依据,设该点为G210。进出口各设了 3 个 GPS 控制点,GP1,GP2,GP3,GP4,GP5,GP210,其中GP1、GP5分别是进洞和出洞桩。图1是公路二号隧道控制测量示意图。
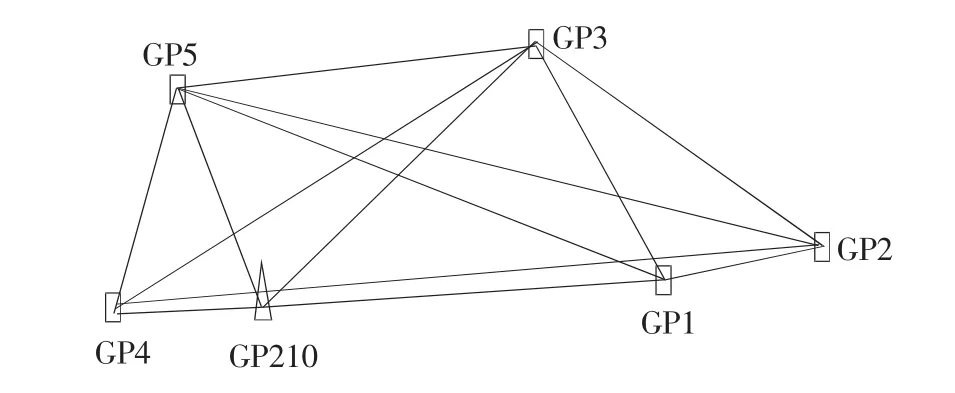
图1 公路隧道GPS测量控制网示意图
3.3 GPS的外业测量
在进行实际测试中,GPS接收机对于测量准确度很重要,其接收机必须满足如表2要求。
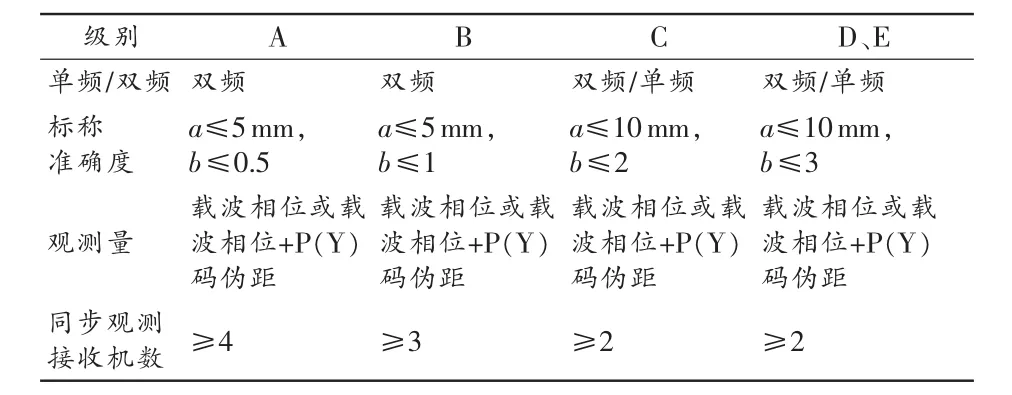
表2 接收机的选用要求1)
采用4台Ashtech Z-Xtreme接收机进行GPS数据信息接收与测量,其测量工作程序如图2所示。
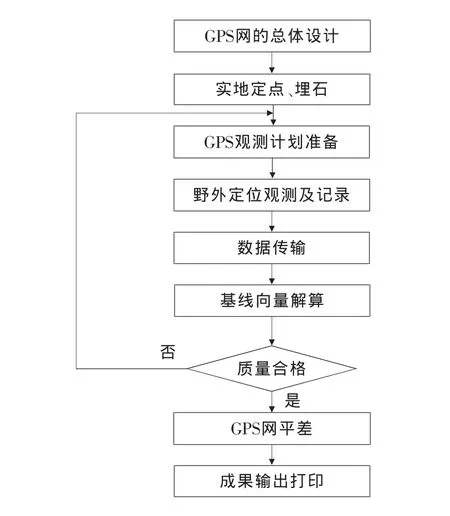
图2 GPS测量工作程序
在进行GPS观测时,应注意:根据卫星可见性预报,优选最佳观测时段进行GPS观测;采取1 mm天线对中精度,误差要求≤±5°,在具体观测时,从3个方向量取数,并要求误差≤±2 mm,然后采用算术平均值进行取数;卫星高度截止角≥15°,PDOP值<4,接收卫星数>5;观测时,不要在天线附近实用对讲机或移动电话,以减少信号干扰。在使用正确的观测方法的情况下,进行同步观测的GPS测量数据见表3~表5。(其中分3次同步观测,且每次观测时间都在60min以上)。

表3 第一时间段观测数据
表4 第二时间段观测数据

表5 第三时间段观测数据
取3次观测数据的平均数(表6)做数据处理和精度分析。

表6 观测数据的平均数
观测完毕后,需要将观测数据传入到电脑软件中,由软件进行测量数据的处理与分析,软件采用Ashtech Solutions 2.60进行数据传输[9]。
3.4 GPS测量的数据处理和精度分析
在进行GSP测量数据分析与处理时,可以采用Ashtech Solutions 2.60软件协助,该软件可以通过基线解算及控制网的平差协助数据分析与精度处理。进行数据处理主要是基线数据处理,软件处理基线数据的原理[10]是通过删除记录时间短于10min及出现周跳部分的卫星数据,进行基线解算。
(1)同步环闭合差
进行同步环闭合差,根据实际基线向量结果,可以获取到9个同步环。相对误差最大为2.486×10-6,最小为 0.479×10-6,小于允许值 5×10-6。
(2)异步环闭合差
异步环在衡量外业观测成果和GPS网内部结构质量、GPS测量总体精度中起着关键的作用。全网共检查异步环6个,相对误差最大为2.873×10-6,最小为 1.438×10-6,小于允许值 5×10-6。
(3)GPS网自由网平差
基线解算符合精度要求后调入基线数据。在WGS84系统中进行无控制点条件下的三维无约束平差。经过平差后进行改正,其绝对值必须满足[11]式(4)。
接着以测区已知GPS控制点G210的坐标作为起算坐标,进行二维约束平差计算,其值与无约束平差的绝对值必须满足式(5)。
1)无约束平差。在公路隧道控制测网GPS数据解算时,无约束平差后各个基线分量中,误差最大的基线为GP210-GP05,其改正数绝对值VΔz=0.015m、VΔy=0.022 m、VΔx=0.017 m,均小于 3σ=0.165 m,满足GB/T 18314-2009《全球定位系统(GPS)测量规范》中E级要求。
2)约束平差。在公路隧道控制网GPS数据解算时,约束平差后,改正值与无约束平差绝对值误差最大为GP02-GP06,其改正数绝对值VΔz=0.047 m、VΔy=0.028 m、VΔx=0.064 m,均小于 2σ=0.524 m,满足满足GB/T 18314-2009《全球定位系统(GPS)测量规范》中E级要求。
3.5 测量结果数据分析
通过对该GPS控制网的精度分析,得出以下结论:所得数据结果的精度满足GB/T 18314-2009《全球定位系统(GPS)测量规范》中E级要求:同步环闭合差相对误差最大为2.486×10-6,最小为0.479×10-6,小于允许值5×10-6;异步环闭合差相对误差最大为2.873×10-6,最小为 1.438×10-6,小于允许值 5×10-6;无约束平差误差最大的基线,其改正数绝对值VΔz=0.015 m、VΔy=0.022m、VΔx=0.017m,均小于 3σ=0.165m;约束平差后,基线分量的改正数与同一基线的无约束平差相应改正数较差的绝对值误差最大的基线其改正数绝对值 VΔz=0.047 m、VΔy=0.028 m、VΔx=0.064 m,均小于 2σ=0.524m。
4 结束语
本文对公路隧道贯通的平面控制测量中采用的是GPS相对定位测量技术,在山区植物茂盛、道路崎岖等环境下,此技术充分发挥了它的优势,与常规测量相比,它不需要两点间无需通视就能直接观测,节省了人力、物力等,与常规测量相比有明显的优势。
[1]Murphy A M,Tsutsumi S,Gaussen P.A low-power,low-cost bipolar GPS receiver chip[J].IEEE Journal of Solid-state Circuits,1997,4(2):587-591.
[2]许进,周宁.GPS接收机的单片机通讯接口[J].电子器件,1999,22(3):23-26.
[3]张坤宜.交通土木工程测量[M].北京:人民交通出版社,2006,2(8):79-82.
[4]钟孝顺,聂让主.测量学[M].北京:人民交通出版社,2006(5):109-111.
[5]周建东.高速铁路施工测量[M].成都:西南交通大学出版社,2011,23(2):123-226.
[6]徐忠阳.GPS原理与应用[M].北京:解放军出版社,2003,45(6):48-72.
[7]刘美生.全球定位系统及其应用综述(三):GPS的应用[J].中国测试技术,2007,33(1):5-11.
[8]Leick A.GPS satellite surveying[M].John Wiley Sows,1990.
[9]林晶,茅钟明.基于GPRS技术双向监控在化工行业中的应用[J].计算机工程与设计,2007(12):36-37.
[10]刘明,常青,张其善.基于GPRS的油井监控系统[J].网络技术,2003(10):18-20.
[11]庞志勇,刘冬华,黄沫.基于GPRS数据传输终端的实现[J].中山大学学报论丛,2006,26(2):129-133.
猜你喜欢
军事文摘(2023年18期)2023-11-03 09:45:42
高技术通讯(2021年3期)2021-06-09 06:57:46
科学(2020年5期)2020-11-26 08:19:14
科技资讯(2018年22期)2018-01-29 10:31:40
大陆桥视野·下(2017年6期)2017-09-05 15:34:20
中国科技博览(2017年4期)2017-05-19 08:06:45
测绘科学与工程(2017年1期)2017-05-04 03:40:44
舰船电子对抗(2016年5期)2016-12-13 08:41:14
太空探索(2016年7期)2016-07-10 12:10:15
太空探索(2015年8期)2015-07-18 11:04:44
