
机器人辅助腹腔镜肾部分切除术(附20例报告)
2013-11-14 08:39:34谢永鹏马鑫李宏召史涛坪张瑜艾青范阳高宇李新涛陈路遥明少雄沈东来顾良友牛少曦李世超巩会杰张旭
微创泌尿外科杂志 2013年6期
谢永鹏 马鑫 李宏召 史涛坪 张瑜 艾青 范阳 高宇 李新涛 陈路遥 明少雄沈东来 顾良友 牛少曦 李世超 巩会杰 张旭
1中国人民解放军总医院泌尿外科100853北京
传统的外科治疗是通过开放手术来完成的,腹腔镜和机器人手术通过器械的技术革新使手术微创化,是对传统外科学的进一步发展。腹腔镜应用于泌尿外科手术,使切口缩小达到了极限,通过视频辅助,使手术的操作部位有理想的显露。但是,在关注其优点的同时,传统腹腔镜也存在着诸多不利之处,如镜头的不稳定性;视野是二维的,没有立体感;直器械自由度小;不符合术者人体工程学标准等等。机器人手术系统在泌尿外科的临床应用,则使手术的微创化程度进一步加深,克服了传统腹腔镜的不足,使微创手术能更加完美[1]。我院在成功完成数百例机器人辅助腹腔镜根治性前列腺癌切除术的基础上,为20例肾肿瘤患者行机器人辅助腹腔镜肾部分切除术(robot-assisted laparoscopic partial nephrectomy,RALPN),疗效满意,现报告如下。
1 资料与方法
1.1 临床资料
本组20例,男16例,女4例,平均58(39~72)岁。20例均为健康体检发现,无其他不适症状。术前影像学检查(超声、CT、MR)诊断为T1期肾癌,肿瘤位于左肾9例,右肾11例,其中位于肾上极6例,中极10例,下极4例,均呈外向型生。肿瘤直径平均2.9(0.8~6.0)cm,肾肿瘤包膜完整。
1.2 手术方法
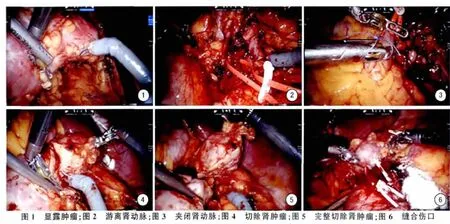
麻醉起效后,患者取健侧斜卧45°体位,术野常规消毒铺巾,留置F14号尿管。用记号笔标记出患侧肋缘及锁骨中线,于患侧距脐2cm处作一长约12mm纵形皮肤切口标记为镜头孔,患侧肋缘下约6cm锁骨中线稍内侧处作一长约8mm切口标记为第1机械臂臂孔,以镜头孔为等腰三角形顶点,于患侧下腹锁骨中线稍外侧作一长约8mm切口标记为第2机械臂臂孔,第1、2机械臂臂孔距镜头孔间距相等,并于第1臂孔内侧约4cm处作一5mm切口标记为第一辅助孔,于镜头孔下方约4cm处作一5mm切口标记为第二辅助孔。按标记线切开镜头孔处皮肤及皮下组织,以Hasson法将12mm Trocar置入腹腔,注入CO2气体,保持气腹压14 mm Hg(1.862kPa)自镜头孔 Trocar手动放入镜头,切开各标记处皮肤,皮下组织,镜头观察直视下将不同Trocar置入上述各位点,将床旁机械臂手术系统移入位,三个臂与上述相应Trocar连接,并分别置入镜头、单极弯剪(1臂)、双极钳(2臂),辅助孔内置入吸引器及肠钳等辅助器械。镜下观察解剖标志,打开患侧腹膜及结肠韧带,将患侧半结肠向内侧牵开,在后腹膜与肾周筋膜间隙分离,纵行切开肾周筋膜,打开肾周脂肪囊,沿肾表面依次锐性分离肾脏腹侧、下极、上极和背侧,游离显露出肾脏肿瘤(图1),游离肾动脉(图2),用无损伤“哈巴狗钳”钳夹、阻断肾动脉(图3),用剪刀沿肾肿瘤边缘(约0.5cm处)剪开肾实质,逐步剪向深部,将肿瘤完整切除(图4、5)。用可吸收带倒刺线分2层缝合肾创面.缝线拉紧后均用Hem-o-lok夹固定(图6)。去除“哈巴狗钳”钳夹。观察创面无明显出血。置入取物袋,将标本放入取物袋取出。仔细检查并止血至无活动出血。清点器械、纱布无误,拔除所有Trocar,分别缝合切口,手术结束。
2 结果
本组手术均获成功,无一例转换术式,均无围手术期并发症发生。肿瘤平均直径2.9(0.8~6.0)cm,手术时间(不含术前机器人准备)119(80~180)min,肾动脉阻断时间17(10~25)min,术中出血量88(10~300)ml。术后均3d下床活动,2.6(0~7)d拔除引流管,术后住院6.8(5~11)d,术后血清肌酐升高16.5(-1.5~48.6)μmol/L。术后病理检查提示20例均为透明细胞癌,所有肿瘤组织病理检查切缘为阴性。病理分期均为T1N0M0。随访1~3个月,无局部复发及远处转移,肾功能均在正常范围内。本手术相关资料及我院同组人员腹腔镜肾部分切除术资料比较情况见表1。
3 讨论
随着B超、CT和MRI等现代影像技术的广泛应用,51%~56%的肾癌被偶然发现,并且偶发性肾癌往往具有体积较小(直径<4cm),增长速度慢和转移潜能低的特点,预后好于症状性肾癌[2]。保留肾单位肾部分切除术(NSS)的适应证是肾癌发生于解剖性或功能性的孤立肾,根治性肾切除术将会导致肾功能不全或尿毒症的患者,如先天性孤立肾、对侧肾功能不全或无功能者以及双侧肾癌等;相对适应证是肾癌对侧存在某些良性疾病,如肾结石、慢性肾盂肾炎或其他可能导致肾功能恶化的疾病(如高血压、糖尿病、肾动脉狭窄)患者。NSS可选择的适应证是临床分期为T1a期(肿瘤<4cm)、肿瘤位于肾脏周边和单发的无症状肾癌而对侧肾功能正常者,NSS与根治性肾切除术的疗效相同。手术方式包括开放手术和腹腔镜肾部分切除术(LPN)。随着腹腔镜在外科领域的推广使用.LPN创伤小、恢复快、术野清楚、术中出血少等优势更加突出,在临床上的应用日益广泛,多中心的研究已经证实LPN治疗早期肾肿瘤疗效确切、治疗安全[3,4]。在泌尿外科领域,此术式在国内外已成为反映学科技术先进性的一项标志。但是传统腹腔镜由于术中使用直器械操作,其自由度小,不符合术者人体工程学标准,在重建手术中操作难度大;而达芬奇机器人手术系统拥有三维视野、多关节的内手腕器械装置(全自由度关节),符合人体工程学的手术操作台,克服了传统腹腔镜的不足,使得微创手术更加完美。国外报道机器人辅助腹腔镜肾部分切除术(RALPN)治疗早期肾肿瘤取得较好疗效[5~8]。由于机器人手术系统可以获得更精细的切割和缝合,RALPN在复杂性肾肿瘤(肾门部肿瘤、内生型肿瘤、肾多个肿瘤)的治疗中可以更加体现出手术中操作优势[9,10]。

表1 RALPN术式相关资料比较分析
对于部分肾肿瘤小于7cm的患者,腹腔镜肾部分切除术(LPN)的应用正在逐渐增加,其肿瘤控制与开放手术相似,且具有较低的复发率及更快的术后恢复等。可是LPN需要较高的腹腔镜手术操作技巧和较长的学习曲线。机器人技术的应用让没有腹腔镜手术经验的医生更加容易、安全和高效的掌握肿瘤切除和肾脏重建的技术难题。自2004年起,先后有9所医院报道了他们行机器人辅助腹腔镜保留肾单位肾部分切除术(RALPN)资料,根据早期的经验总结,RALPN与LPN各项结果均差异无统计学意义[11,12]。而在2008年,RALPN已经成为世界范围内数量增长最快的机器人手术方式。RALPN均遵循经腹LPN的原则,Wang等[13]报道其102例肾部分切除(40RALPNs和62LPNs)的经验中,RALPN与LPN比较手术时间(140min:156min,P=0.04)、出血量(136ml:173ml)、肿瘤大小(2.5 cm:2.4cm)、肾盂肾盏修补(均为56%)、切缘阳性(均为1例)等项指标,结果显示两种手术方式均差异无统计学意义。Wang等[13]应用新的滑夹阻断技术(Sliding-clip Renorrhaphy)使RALPN较LPN的热缺血时间明显缩短(19min:25min,P=0.03)。
本组术前机器人准备时间30min,手术时间(不包括术前机器人准备时间)119(80~180)min,肾动脉阻断时间17(10~25)min,术中出血量88(10~300)ml,无围手术期并发症,随访无局部复发及远处转移。与国外初期的RALPN资料相比,本组在平均手术时间、热缺血时间、术中出血方面均优于国外报道。并且未发生国外报道的术后出血二次手术探查止血、术后尿瘘等手术并发症;本组术后住院时间长于国外资料,这与患者习惯及医疗体制有关。与我院同组人员LPN的资料相比,在平均手术时间、热缺血时间、术中出血等方面均差异无统计学意义(P>0.05),这可能与RALPN初期操作尚不熟练,对达芬奇机器人手术系统使用经验不足,与助手的配合不协调等因素有关,也与手术步骤不一样有关。随着对RALPN手术经验的积累,RALPN的优势将逐步显现。
即使机器人手术系统已在全球迅速广泛普及,但其仍有一些亟待解决的问题:①机器人手术系统设备庞大,占用空间多;②术前系统准备时间较长;③无力反馈系统,术者无触觉;④ 手术费用较高。但是,机器人手术系统的三维视野及内手腕器械装置的灵活性使其在体内进行重建操作容易,是不争的事实,随着操作经验的积累和科技的发展,RALPN的优势将更加明显。机器人手术是传统泌尿外科及腹腔镜为代表的微创泌尿外科技术的进一步发展,并在将来会成为主流。我们的初步经验证明RALPN是一种创伤小、安全可靠、疗效确切的手术方式。
[1]高江平,崔亮.机器人辅助腹腔镜前列腺癌根治术.临床外科杂志,2008,16(2):100-102.
[2]Gill IS,Kavoussi LR,Lane BR,et al.Comparison of 1,800laparoscopic and open partial nephrectomies for single renal tumors.J Urol,2007,178(1):41-46.
[3]Collins S,McKiernan J,Landman J.Update on the epidemiology and biology of renal cortical neoplasms.J Endourol,2006,20(12):975-985.
[4]Haber GP,Gill IS.Laparoscopic partial nephrectomy:contemporary technique and outcomes.Eur Urol,2006,49(4),660-665.
[5]Gettman MT,Blute ML,Chow GK,et al.Roboticassisted laparoscopic partial nephrectomy:technique and initial clinical experience with DaVinci robotic system.Urology,2004,64(5):914-918.
[6]Phillips CK,Taneja SS,Stifelman MD.Robot-assisted laparoscopic partial nephrectomy:the NYU technique.J Endourol,2005,19(4):441-445.
[7]Caruso RP,Phillips CK,Kau E,et al.Robot assisted laparoscopic partial nephrectomy:initial experience.J Urol,2006,176(1):36-39.
[8]Kaul S,Laungani R,Sarle R,et al.da Vinci-assisted robotic partial nephrectomy:technique and results at a mean of 15months of follow-up.Eur Urol,2007,51(1):186-191.
[9]Rogers CG,Singh A,Blatt AM,et al.Robotic partial nephrectomy for complex renal tumors:surgical technique.Eur Urol,2008,53(3):514-521.
[10]Rogers CG,Metwalli A,Blatt AM,et al.Robotic partial nephrectomy for renal hilar tumors:a multi-institutional analysis.J Urol,2008,180(6):2353-2356.
[11]Gautam G,Benway BM,Bhayani SB,et al.Robot-assisted partial nephrectomy:current perspectives and future prospects.Urology,2009,74(4),735-740.
[12]Benway BM,Bhayani SB,Rogers CG,et al.Robot assisted partial nephrectomy versus laparoscopic partial nephrectomy for renal tumors:a multi-institutional analysis of perioperative outcomes.J Urol,2009,182(3):866-872.
[13]Wang AJ,Bhayani SB.Robotic partial nephrectomy versus laparoscopic partial nephrectomy for renal cell carcinoma:single-surgeon analysis of>100consecutive procedures.Urology,2009,73(2):306-310.
猜你喜欢
现代泌尿外科杂志(2022年7期)2022-08-01 02:27:48
现代泌尿外科杂志(2022年6期)2022-07-06 05:06:28
现代泌尿外科杂志(2022年5期)2022-06-09 05:46:10
河北理科教学研究(2021年3期)2022-01-18 05:34:24
发明与创新(2021年39期)2021-11-05 07:15:28
材料科学与工程学报(2016年1期)2017-01-15 13:33:48
海南医学(2016年8期)2016-06-08 05:43:00
汽车文摘(2015年11期)2015-12-02 03:02:53
医学研究杂志(2015年7期)2015-06-22 11:00:39
天津医科大学学报(2015年3期)2015-06-05 12:21:49
