反潜直升机吊放声呐应召搜潜效能建模与仿真分析
2013-11-10 05:37陈辉,郑杨
中国电子科学研究院学报 2013年6期
陈 辉,郑 杨
(中国电子科学研究院,北京 100041)
0 引言
反潜直升机由于具有机动性强、反应速度快、搜索手段丰富等特点,在反潜作战中扮演着重要角色。在直升机应召反潜作战过程中,根据目标潜艇信息概知条件选择使用合理的吊放声呐搜索图形可以提高搜索效能。本文主要研究目标初始位置已知、航向航速未知情况下的吊放声呐应召搜索效能,建立搜索效能模型,计算出圆形、方形搜索图形的搜索概率。采用蒙特卡洛方法模拟目标运动规律及搜索过程进行仿真,并将仿真结果与理论计算值对比,验证效能模型有效,并分析了不同战术作用距离下吊放声呐的搜索效能。该模型的建立对吊放声呐辅助决策系统搜索效能计算具有重要指导意义。
1 吊放声呐的特点及使用
吊放声呐是反潜直升机重要搜潜武器装备,具有温深、主动与被动三种工作方式,通常在作战过程中使用主动工作方式。主动工作模式具有发射声波能力,一旦目标潜艇在回波信号范围内,即可迅速发现该目标的距离与方位。当主动声呐多次捕捉到该目标信息时,经过滤波可以计算出目标径向速度。使用主动工作模式另外一个好处是即使未能在第一时间发现目标,也可对目标产生威慑作用,使目标潜艇不敢贸然对非友部队采取军事行动。
吊放声呐的使用方法是根据应召目标概知信息选择搜索图形,反潜直升机飞往第一个吊放声呐吊放点,在海面迎风悬停,将吊放声呐放置海水中,打开温深工作方式,测量当前海洋的温深、声速深度等参数,经过计算可知当前吊放声呐的最佳工作深度及实际探测距离。然后将吊放声呐放置最佳工作深度后打开主动全向工作模式,对目标进行探测。如果未发现目标应收起缆绳,将吊放声呐转换为温深或被动工作方式,立刻飞往下一个吊放点,反复以上过程,直到发现目标。
2 搜潜效能模型
评估搜索效能的计算和仿真基础是对潜艇的概率分布建模,包括初始位置分布建模和潜艇运动建模。推导得到吊放声呐点水时刻的潜艇分布后,对概率密度积分可计算出搜潜概率,作为效能评估的量化指标。
2.1 目标潜艇初始位置散布
由于目标初始位置的信息误差,根据中心极限定理,直角坐标系下初始位置(X0,Y0)服从二维正态分布,其位置散布概率密度为
其雅可比行列式为
则极坐标下的概率密度为
极坐标下的概率密度Φ0(r,θ)可化为相互独立的瑞利分布ΦR0(r)和均匀分布Φθ0(θ)的乘积。故极坐标初始位置(R0,θ0)中,R0与 θ0相互独立,分别服从瑞利分布ΦR0(r)和均匀分布Φθ0(θ)。

2.2 目标潜艇运动后位置散布
据前所述,目标潜艇初始位置(X0,Y0)服从二维正态分布同样,根据中心极限定理,一定时间内目标运动引起的位移(X1,Y1)服从二维正态分布由于(X0,Y0)、(X1,Y1)相互独立且同为二维正态分布,因此(X0+X1,Y0+Y1)服从二维正态分布
所以,引用前面的推导可知,由运动引起的径向位移R1也服从瑞利分布[1],概率密度为
下面根据潜艇的经济航行速度vse求解σ1。

令σ1=σVt,得
可见潜艇速度V也服从瑞利分布,其均值为
所以,

变换成直角坐标系下的概率密度为

2.3 一次点水搜索概率计算
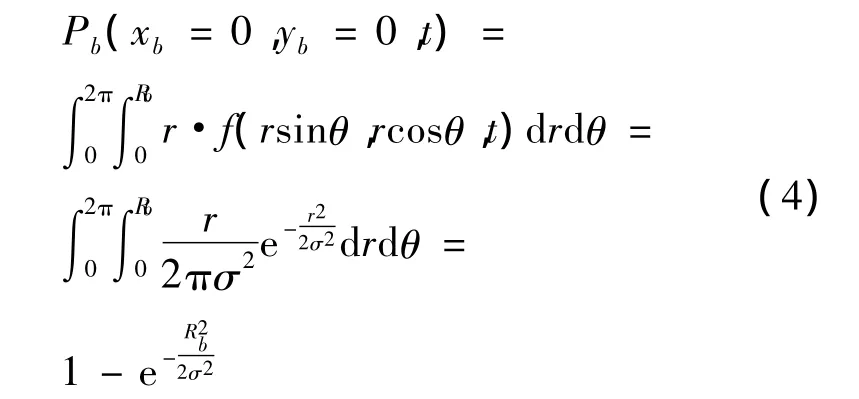
以目标潜艇在接触时刻的位置为坐标原点建立直角坐标系,设单个传感器位于(xb,yb)、探测半径Rb,则t时刻该传感器发现该目标的概率为

其中f(x,y)为相应运动情况的目标运动后位置散布概率密度。
进行坐标平移,变换式为
其雅可比行列式为
故直角坐标平移后相应的目标运动后位置散布概率密度为

变换成极坐标系下的概率密度为

积分得到搜索概率

将式(2)代入式(3)求得此时原点(xb=0,yb=0)处的传感器搜索概率为
2.4 搜索图形效能计算模型
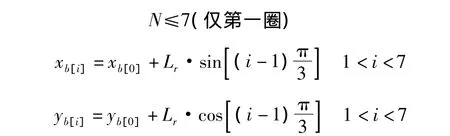
假设某次吊放声呐搜潜任务中,吊放点数N,各吊放点位置为(xb[0],yb[0])~ (xb[N-1],yb[N-1]),吊放声呐侦听的探测半径为Rb,首点侦听时刻Tf,时间采样间隔为Ts,相邻吊放点间飞行及准备吊放时间为Tt,每个吊放点处的侦听时间为T。
在一次单机吊放声呐搜潜任务中,由于各次吊放未发现潜艇是独立事件,因此根据概率的乘法原理,本次任务吊放声呐搜潜的搜索概率为

2.4.1 圆形搜索效能计算模型
吊放声呐圆形搜索图形,如图1所示。图中第一次吊放点的方位为最后一次探测到目标出现的方位。
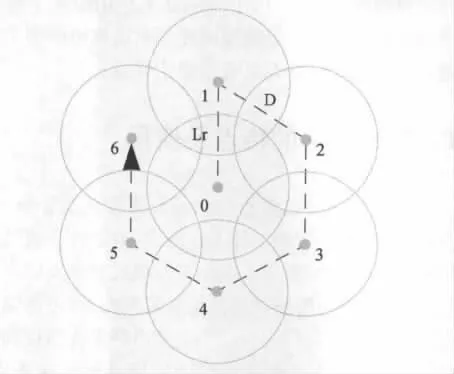
图1 吊放声呐圆形搜索图形
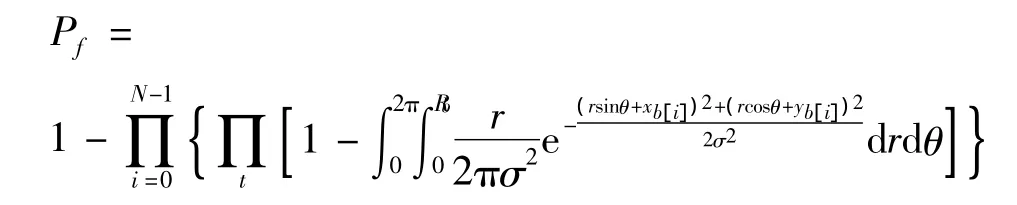
当潜艇运动情况为未知速度、未知航向时,将式(2)、(3)代入式(5)可知本次任务吊放声呐搜潜的搜索概率为
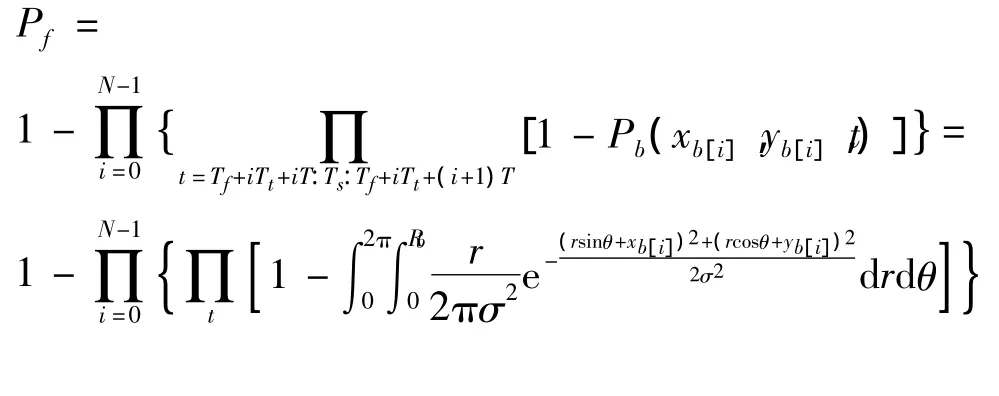
其中
2.4.2 方形搜索效能计算模型
吊放声呐方形搜索图形示意图,如图2所示。图中第一次吊放点的方位为最后一次探测到目标出现的方位。
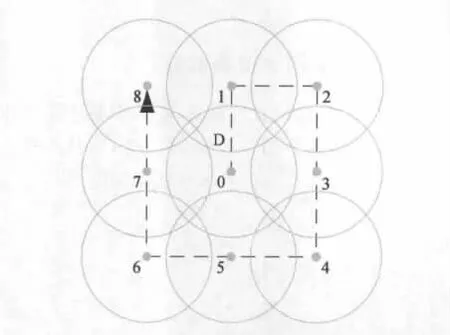
图2 吊放声呐方形搜索图形
当潜艇运动情况为未知速度、未知航向时,同理可知本次任务吊放声呐搜潜的搜索概率同样为
其中,
3 效能仿真分析
3.1 吊放声呐圆形搜索效能仿真
仿真参数设置如下:假设反潜直升机剩余留空时间可以满足一次吊放声呐圆形搜索任务,目标潜艇经济航速vse=9.7 knot,信息初始误差σ0=1 km,吊放声呐侦听的探测半径Rb=3.5 km,吊放点间距D=1.4Rb,搜索图形圆半径Lr=D,直升机飞行航速Vw=144 km/h,首点侦听时刻Tf=1 200 s,时间采样间隔Ts=60 s,吊放声呐侦听时间T=180 s,相邻吊放点间飞行过度时间,收放吊放声呐缆绳及其它作战准备时间约为120 s,仿真样本数为106,采用蒙特卡洛方法生成的随机目标样本经随机速度、随机方向运动时间t后,统计其是否处于任一个吊放声呐探测范围内概率,见表1。
表1 不同吊放点数下的计算结果与仿真结果数据对比
吊放点数与发现概率的关系曲线,如图3所示。
图3 吊放点数与发现概率关系曲线图
通过表1与图3可知,计算结果与仿真结果基本吻合,可通过增加仿真样本数来减少误差,当仿真样本数足够大时,计算结果与仿真结果一致,说明圆形吊放声呐搜索效能模型正确。
3.2 吊放声呐方形搜索效能仿真
仿真参数设置如下:假设反潜直升机剩余留空时间可以满足一次吊放声呐方形搜索任务,目标潜艇经济航速vse=9.7 knot,信息初始误差σ0=1 km,吊放声呐探测距离Rb=3.5 km,吊放点间距D=1.5Rb,直升机飞行航速Vw=144 km/h,首点侦听时刻Tf=1 200 s,时间采样间隔Ts=60 s,吊放声呐侦听时间T=180 s,相邻吊放点间飞行过度时间Tt≈,收放吊放声呐缆绳及其它作战准备时间约为120 s,仿真样本数为106,采用蒙特卡洛方法生成的随机目标样本经随机速度、随机方向运动时间t后,统计其是否处于任一个吊放声呐探测范围内概率,见表2。
表2 不同吊放点数下的计算结果与仿真结果数据对比
吊放点数与发现概率的关系曲线,如图4所示。
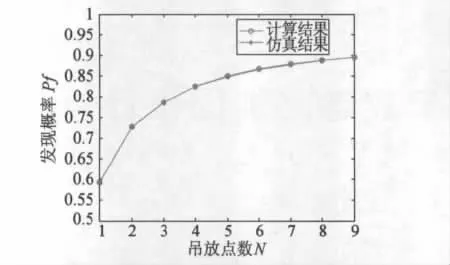
图4 吊放点数与发现概率关系曲线图
通过表2与图4可知,计算结果与仿真结果基本吻合,可通过增加仿真样本数来减少误差,当仿真样本数足够大时,计算结果与仿真结果一致,说明方形吊放声呐搜索效能模型正确。
3.3 吊放声呐探测距离对搜索效能的影响
实际作战环境中,吊放声呐探测的战术作用距离随档位、工作深度、海洋环境等多种因素而变化。本节以圆形搜索为例,讨论战术作用距离变化对吊放声呐搜潜效能的影响。
吊放点间距系数固定为1.4(即D=1.4Rb),其余条件均同3.1节,得到吊放声呐战术作用距离与发现概率的关系,如图5所示。
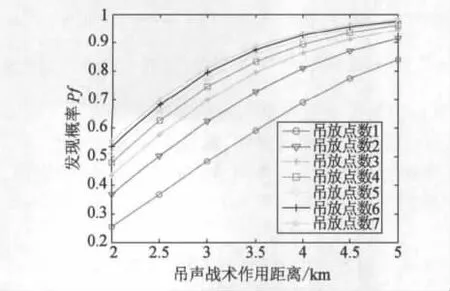
图5 吊放声呐战术作用距离与发现概率关系曲线图
显而易见,在此条件下,吊放声呐战术作用距离越大,搜索效能越高,效能增益变化随吊放点数的增加而趋于平稳。假若固定吊放点间距为D=1.4×3.5 km,而实际战术作用距离由于环境因素在2~5 km之间变化,则可得到吊放声呐实际战术作用距离与发现概率的关系,如图6所示。
由图6可以看出实际搜索效能和未考虑海洋环境影响的搜索效能的对比。当实际战术作用距离小于假定的战术作用距离(3.5 km)时,未考虑海洋环境影响的搜潜效能略低于实际值;反之则高于实际值。
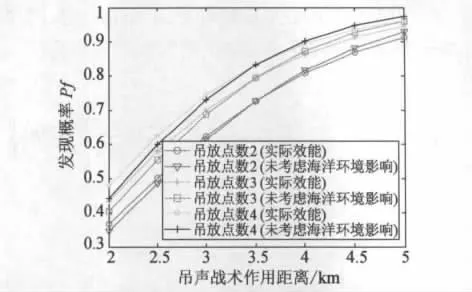
图6 吊放声呐战术作用距离与发现概率关系曲线图
4 结语
根据吊放声呐使用与作战特点,结合目标潜艇初始位置及运动后位置散布规律,建立了反潜直升机吊放声呐圆形、方形搜索图形效能计算模型,并采用蒙特卡洛方法对吊放声呐圆形、方形搜索图形仿真分析,通过不同吊放点次数下的计算结果与仿真结果一致性验证所建立的搜潜效能计算模型有效,分析了不同战术作用距离下的吊放声呐搜索效能。该模型对吊放声呐辅助决策系统搜索效能计算具有一定的理论价值和指导意义。
[1]屈也频.反潜飞机搜潜效能评估与决策建模[M].北京:国防工业出版社,2011.
[2]罗木生,姜青山,侯学隆.正态圆分布下的双机吊放声呐扩展方形搜潜建模[J].电光与控制,2012(7):5-8.
[3]孙华春,张会,王鹏.直升机吊放声呐螺旋线形搜潜概率分析[J].舰船电子工程,2012(8):133-134.
[4]吴芳,杨日杰.多机吊放声呐应召搜潜建模与仿真[J].航空学报,2009(10)159-164.
[5]从红日,黄启来,肖明强.探测点间距对吊放声呐搜索效能影响仿真研究[J].2011(6):111-115.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
小学科学(学生版)(2021年10期)2021-12-28
数学学习与研究(2020年15期)2020-11-28
海洋信息技术与应用(2020年3期)2020-08-24
河北建筑工程学院学报(2020年4期)2020-04-29
小学科学(学生版)(2019年10期)2019-11-16
物理与工程(2019年1期)2019-03-22
数学学习与研究(2018年5期)2018-03-28
宠物世界·猫迷(2016年3期)2016-04-23