
基于Creator和Vega的水空跨越航行器视景仿真
2013-11-06 02:53:43尹翔冯金富吝科徐保伟
飞行力学 2013年5期
尹翔, 冯金富, 吝科, 徐保伟
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
基于Creator和Vega的水空跨越航行器视景仿真
尹翔, 冯金富, 吝科, 徐保伟
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
介绍了工具软件Creator和Vega的特点以及视景仿真的系统结构,并以此为平台进行跨介质航行器的视景仿真。首先构建视景仿真平台,然后进行仿真系统设计及原型程序开发,最后对跨介质航行器出入水以及在水面和水下的航行过程进行了仿真。通过视景仿真完成了水空跨越航行器系统完整设计周期的研究。仿真结果可以为跨介质航行器总体设计提供理论依据和研究手段。
视景仿真; 跨介质航行器; 虚拟现实; 三维建模
0 引言
目前虚拟现实技术的实现主要依靠视景仿真,通过计算机图形图像技术构建仿真技术平台,首先明确仿真的目的,然后开发仿真对象的三维模型,最后还原真实的环境[1-2]。
现有的视景仿真多是在单一介质中进行,对于水空跨介质航行器的视景仿真较少涉及,主要是因为水空跨介质航行器的仿真需要融合气动、水动和总体设计。为了直观地显示水空跨越全过程,本文采用Multigen Creator和Vega对水空跨介质航行器进行了视景仿真,介绍了视景开发环境、仿真平台的构建,对最终的仿真案例进行测试与分析。
1 视景开发环境
1.1 开发工具
逼真化是视景仿真要达到的基本要求,为此要先建立三维场景模型。当进行仿真时,采用Multigen Creator和Vega建模、仿真并渲染复杂的三维场景模型。
Multigen Creator是一种手动的真实三维建模工具,具有高逼真度的特点,广泛应用于视景仿真、交互式仿真以及其他领域。Multigen Creator不仅可以将矢量建模、地形生成和多变性建模集成在一个软件包中,还可以进行建模、地形表面生成等。Multigen Creator的建模功能可为各种类型图像发生器提供建模系统及工具,如层次细节、逻辑筛选、多边形筛选、绘图优先级;而分离面等高级功能使OpenFlight(.flt)格式成为实时仿真领域中通用性最好的图像生成格式,并作为行业标准[3]。
Vega是用于实时可视化仿真、开发交互式应用的完整软件平台,具有易操作、高效、集成、可扩展及跨平台等特点[4-5]。Vega的基本功能为控制、驱动、管理虚拟场景以及支持各种复杂的视觉仿真程序,创建实时交互三维环境,建立大型非沉浸式或沉浸式的虚拟现实系统。
1.2 视景仿真的系统结构
三维视景仿真系统由场景建模与场景驱动两部分组成。首先采用Vega的API和软件库在VC++6.0平台上调入建成的三维模型和adf文件,然后通过对用户输入的代码响应进行编制,完成初始化,对动态改变程序运行,最终完成应用程序[2,6]。开发流程如图1所示。

图1 视景仿真开发流程图Fig.1 Development flowchart for visual simulation
2 仿真平台构建
构建一体化视景仿真技术平台,需采用计算机图形图像开发技术。首先确立仿真目的,然后对仿真对象进行三维模型的建立,同时完成真实环境的再现,最终达到仿真效果逼真化[2,7]。
2.1 系统设计
仿真平台包括虚拟场景模块和航行器模块两部分,系统构成如图2所示。
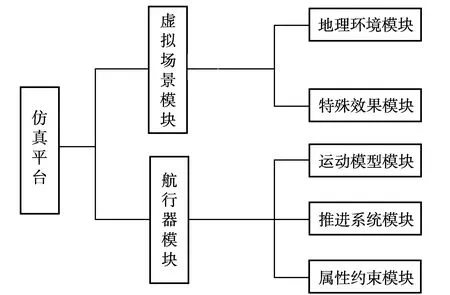
图2 跨介质对抗仿真平台系统模块图Fig.2 System block diagram of trans-media combat simulation platform
虚拟场景模块是平台开发的基本部分,由地理环境模块和特殊效果模块组成。地理环境模块可实现静态场景的虚拟再现,包括大地、海洋以及云层在内的地形地貌。特殊效果模块显示在仿真过程中的战场特效和自然环境特效等实时特效,不但增加了视景仿真的逼真感,而且增强了视觉的真实感。
航行器模块是平台开发的核心部分,主要负责将航行器的设计构想通过虚拟技术直观地展现在仿真平台中,包括运动模型模块、推进系统模块和属性约束模块。运动模型模块主要实现航行器模型的运动特性,使航行器模型表现出与实际飞行过程一致的运动状态,包括方案航行中导航路径控制等。推进系统模块主要用于控制的解算和和动力,如螺旋桨系统的尺寸、位置、转速等。属性约束模块主要协调各模块间的冲突检测和数据交互,以及场景中各对象之间的交叉检测和碰撞检测等。
2.2 原型程序开发
采用Vega和MultiGen Creator进行设计以及开发,仿真流程如图3所示。
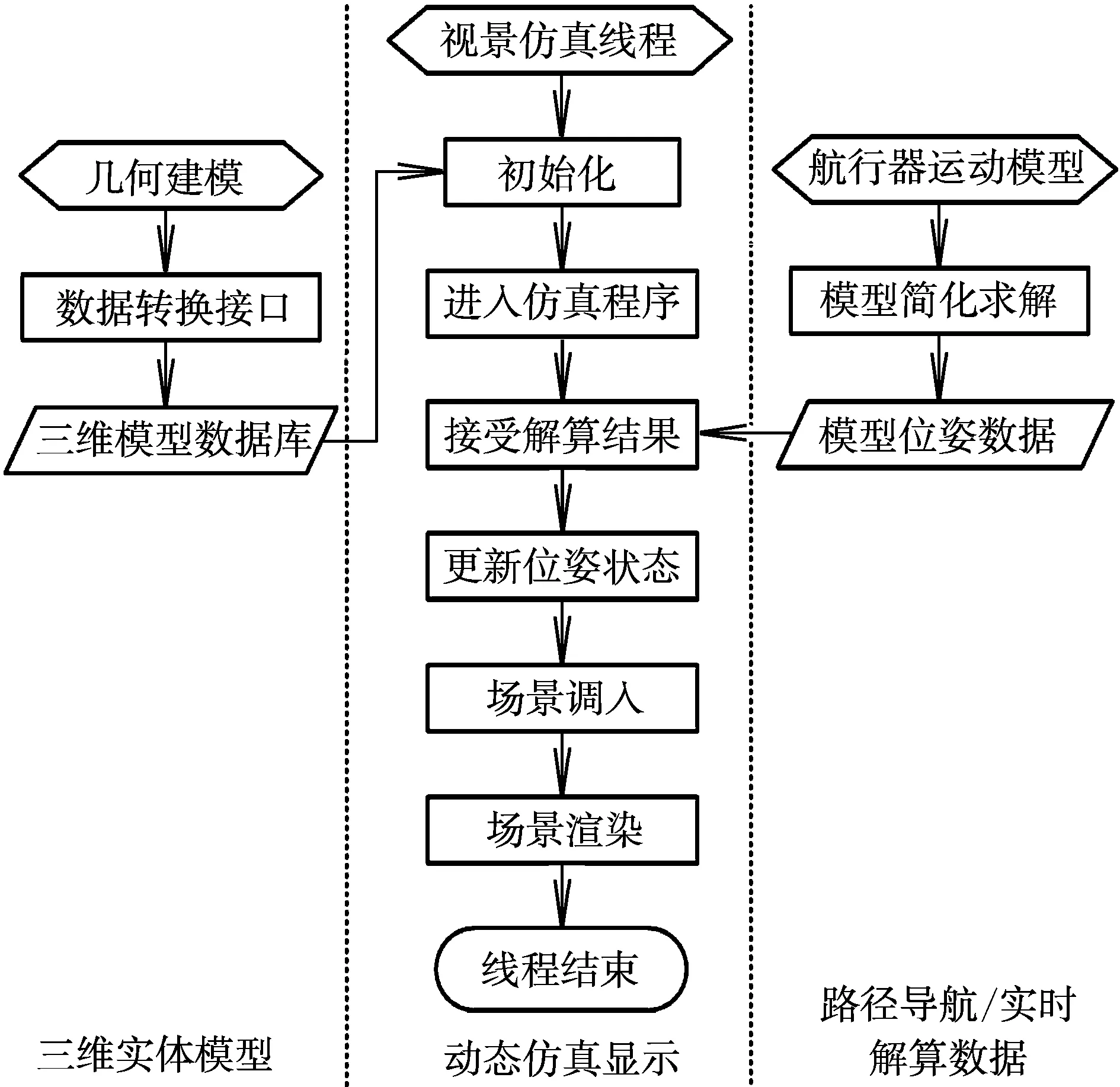
图3 原型程序开发流程图Fig.3 Development flowchart for prototype program
建立虚拟场景中各种物体的三维数字模型和地形的过程称为建模,模型渲染后显示为逼真的物体和地形。本文采用MultiGen公司为满足实时交互应用程序要求而研制的三维建模工具软件Creator进行建模。
由于Vega 只识别flt格式的模型文件,因此使用Creator软件将设计的Catia几何模型转换成可用格式[5]。设计的模型如图2所示。

图4 跨介质航行器模型概念图Fig.4 Concept map of the trans-media vehicle model
Vega 开发环境需与Lynx联合使用。建立地形和场景中物体的三维数字模型后,用Lynx实用程序建立应用程序定义文件(adf)。adf文件主要用于对虚拟现实应用程序中的模型文件、运动模型、特殊效果及环境效果进行描述,并对其他一些功能设置信息。虽然Vega因其含有所需的所有API,自身可以建立虚拟现实应用程序,但Lynx有简化开发流程的作用[2,7]。
Lynx无须编码就可配置应用程序的框架。首先必须创建一个adf文件,启动应用程序可以直接在Lynx中编译adf文件。Lynx定义了通道、观察者、窗口、场景、物体、运动模型、数据库管理等并对其初始化,用于实现实时仿真虚拟环境,生成虚拟场景所需的逼真地物、海底、海浪及天气情况特效(如阴、晴、雨、雪等)。重要的元素有:场景(Scene)、窗口(Window)、通道(Channel)、对象(Object)、角色(Player)、观察者(Observer)。
由于本文研究的是水空跨越,所以在虚拟仿真中必然涉及到水环境,在此选用海洋模块(Marine)来实现水环境的效果。在Vega Marine模块中定义的Ocean包含动态和静态两个部分。
在本仿真系统中,设置静态海洋半径为5000 m,动态海洋半径为200 m。创建一个真实的波浪需用10条正弦曲线和一些非谐波频率,瞬间波浪高度由下式计算[8]:
zcosθi)+ωit+φi]
2.3 Vega API
通过Creator的flt模型构建和Lynx定义的adf文件,完成系统的部分初始设置,但是要实现航行器的空间运算,还要编写相应的程序。
建立Vega应用程序,首先要完成初始化Vega系统,并建立共享内存和信号量等;然后用两种方法创建三维模型,一是通过adf应用定义文件,二是通过显式的函数调用,最终完成配置。
本系统开发的视景仿真程序是基于MFC的Vega应用程序,通过采用模板方法将用户开发一个基于MFC应用程序的工作量减到最低。原型程序主程序流程如图5所示。
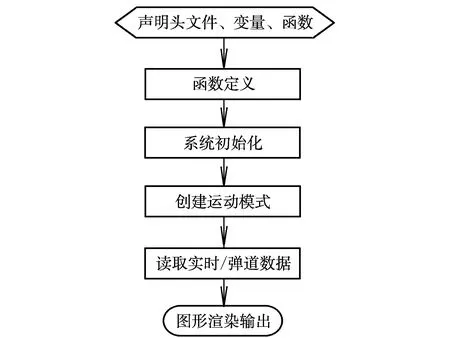
图5 原型程序主程序流程图Fig.5 Flowchart for the main program of prototype program
3 仿真案例测试与分析
原型程序中,设有“设置”、“显示”和“运动”三个模块,分别完成航行器的属性设置,环境的显示效果和运动模式设定等工作。
(1)启动程序,加载海洋环境模块,包括海天环境和波浪效果。
(2)设定模式。设定模式过程加载设计的模型,航行模式在运动模块中选择方案控制,路径文件采用为自行设计的水空跨越演示航行路径。
(3)航行过程。设计的模型从水面起飞,在空中飞行,控制模型翻转180°,成入水姿态,落到水面后依靠负浮力机翼提供下沉力,实现入水操作;出水前同样需要控制翻转,呈机翼在上的出水姿态,在水面滑行增速,依靠机翼提供升力起飞离开水面。仿真结果如6~图8所示。
(4)结果分析。测试结果基本上满足水空跨介质航行器视景仿真的要求,在从水面起飞,到调整姿态准备入水,以及水下航行和调整姿态准备出水阶段都具有良好的构想性、交互性、沉浸性。
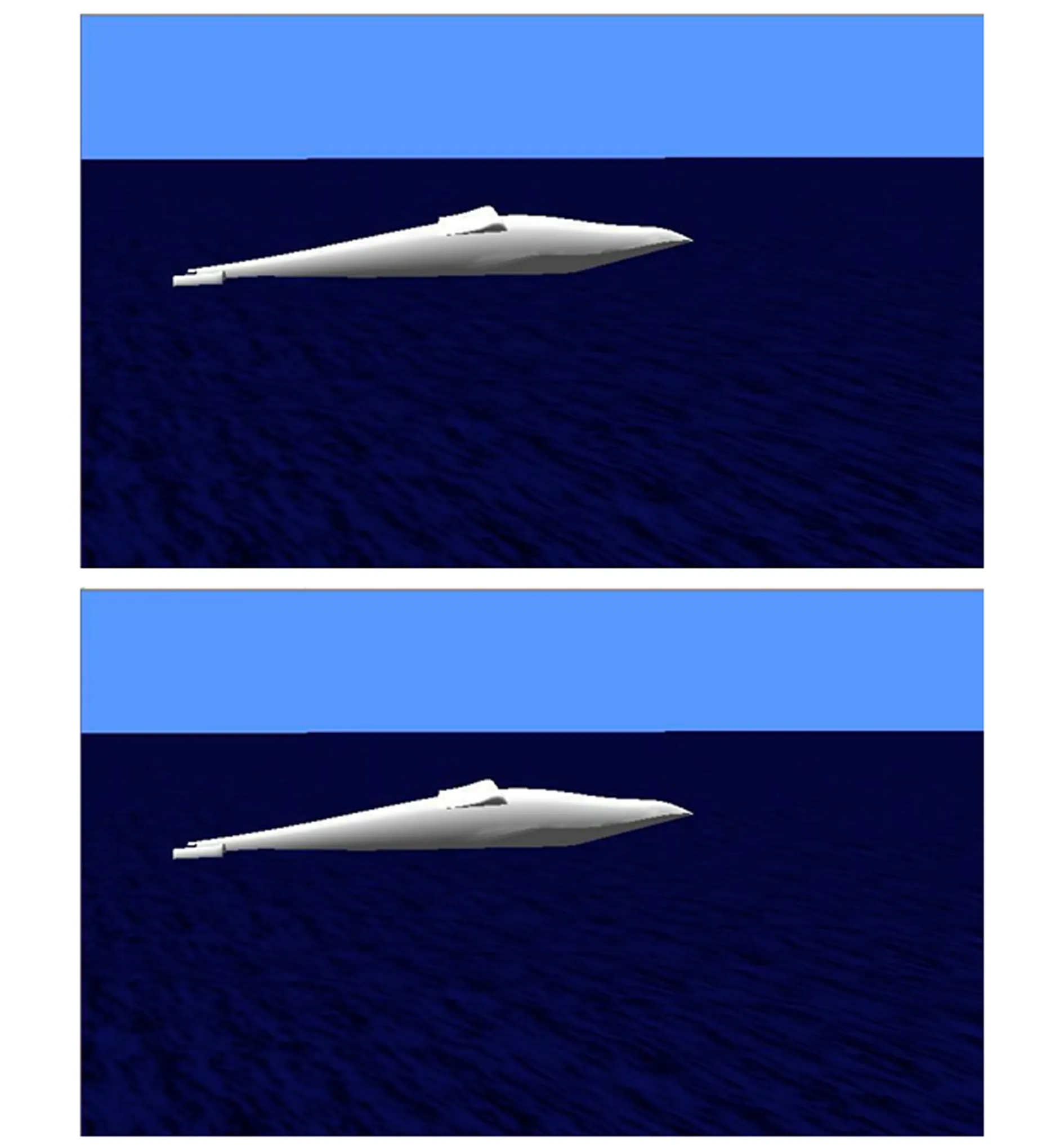
图6 航行器从水面起飞仿真图Fig.6 Simulation chart for the vehicle taking-off from the water surface
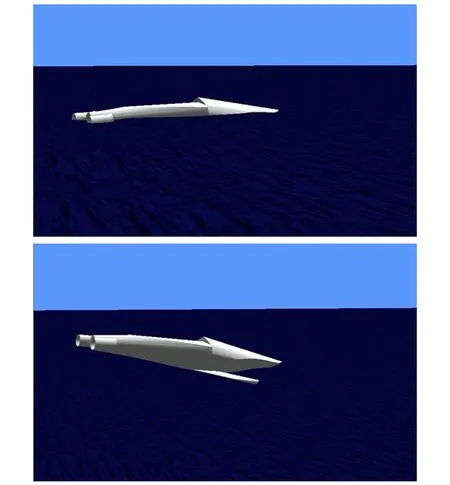
图7 航行器在水面航行和调整姿态准备入水Fig.7 Voyage of the vehicle on the water surface with the attitude adjusted to enter into water

图8 航行器在水下航行和调整姿态准备出水Fig.8 Voyage of the vehicle under the water with the attitude adjusted to come out from the water
4 结束语
本文基于Creator和Vega对水空跨介质航行器的出入水,以及航行过程进行了视景仿真研究,构建了虚拟场景和航行器模型。通过测试表明,仿真结果可以直观准确地显示跨介质航行器的跨越过程,对于跨介质航行器的总体设计和模型验证具有重要意义。
[1] 吕帮俊,邢继峰,黄华斌,等.基于Multigen和Vega的舰船航行视景仿真[J].微计算机信息,2006,22(5-1):299-301.
[2] 朱雨香.视景仿真技术的研究与实现[D].南京:南京理工大学,2004.
[3] 杜亚琦,陈涛,高伟.基于Vega的导弹制导视景仿真系统[J].应用科技,2007,34(10):28-31.
[4] 王乘,李利军,周均清,等.Vega实时三维视景仿真技术[M].第一版.武汉:华中科技大学出版社,2005:1-5.
[5] 王明桂.导弹飞行虚拟现实仿真系统的研究[D].哈尔滨:哈尔滨工程大学,2007.
[6] 赵银玲,吴成富,陈怀民.基于Vega的无人机视景仿真应用研究[J].测控技术,2008,27(1):96-99.
[7] 杨平利,仇小鹏,黄少华.在Vega环境下开发虚拟现实应用程序[J].计算机仿真,2005,22(5):165-168.
[8] 杨银拴.虚拟海洋环境中自动建模技术研究[D].哈尔滨:哈尔滨工程大学,2005.
Visualsimulationofair/watertrans-mediavehiclebasedonCreatorandVega
YIN Xiang, FENG Jin-fu, LIN Ke, XU Bao-wei
(Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China)
This paper presents the features of Creator and Vega softwares and the system structure of visual simulation, which is used as a platform for visual simulation of trans-media vehicle. Firstly, the visual simulation platform is built. Then the design of simulation system is completed and the prototype program is developed. At last, the process of out and into water and the voyage on the water surface and underwater of the trans-media vehicle are simulated. The design cycle of air/water trans-media vehicle system is investigated by visual simulation. The simulation results can provide theoretical basis and research measures for the general design of the trans-media vehicle.
visual simulation; trans-media vehicle; virtual reality; 3D modeling
V211.8
A
1002-0853(2013)05-0477-04
2013-01-15;
2013-05-26; < class="emphasis_bold">网络出版时间
时间:2013-08-21 18:47
尹翔(1989-),男,北京人,硕士研究生,研究方向为视景仿真技术。
(编辑:李怡)
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
电脑报(2019年12期)2019-09-10 05:08:20
电子测试(2018年4期)2018-05-09 07:28:19
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
舰船科学技术(2015年8期)2015-02-27 15:38:41
振动、测试与诊断(2014年4期)2014-03-01 01:14:11
电脑迷(2012年15期)2012-04-29 17:09:47
空间控制技术与应用(2009年2期)2009-12-20 08:30:21
计算机世界(2009年34期)2009-11-17 09:04:02
