
Fuzzycontrol method to minimize the needle deflection duringneedle insertion therapy
2013-11-05 08:00:20ZHANGShaohua张少华JINXin金鑫YEXin叶鑫ZHANGZhijing张之敬LIUBingbing刘冰冰DENGYongjun邓勇军
关键词:金鑫
ZHANG Shao-hua(张少华), JIN Xin(金鑫), YE Xin(叶鑫),ZHANG Zhi-jing(张之敬), LIU Bing-bing(刘冰冰), DENG Yong-jun(邓勇军)
(School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China)
Robot-assisted needle insertion has played an important role in the recent years because of its promising application during the process of percutaneous therapy,such as biopsies[1],regional anesthesia,blood sampling[2],neuron surgery[3]and brachytherapies[4].In these procedures the needles go through the soft,inhomogeneous,isotropy tissue until the needle tip hit a certain target through a particular path.There are some complications[5]due to the tissue deformation and needle deflection[6]caused by the interaction between the needle and tissue.The accuracy of the needle is crucial for the diagnosis or the effection of the treatments.
To improve the needle accuracy,it is essential to measure the location of the needle tip inside the tissue and correct the displacement.An imaging system is incorporated into the procedure to provide the visual feedback to the clinician.However,there are still some limitations in the imaging system to guide the needle to move accurately,like image misalignments and target uncertainty[7]. Other effective techniques are required to guide the needle to accurately hit the target.
In this paper,the interaction between the needle and the tissue is exploited,i.e.rotating the needle a certain angle to generate the effective force acting on the bevel-tip to compensate the needle deflection(Fig.1,Fig.2).Some analytic models are given to reveal the relationship[8-9],but the parameters variable cannot be got easily,such as parameters for the glandular swelling,differences in tissue types,differences in mechanical properties of healthy,damaged and diseased tissue,variability of soft tis-sue properties for same organ in different patients,and the same patient at different times.It is hard to predict the deflection accurately.
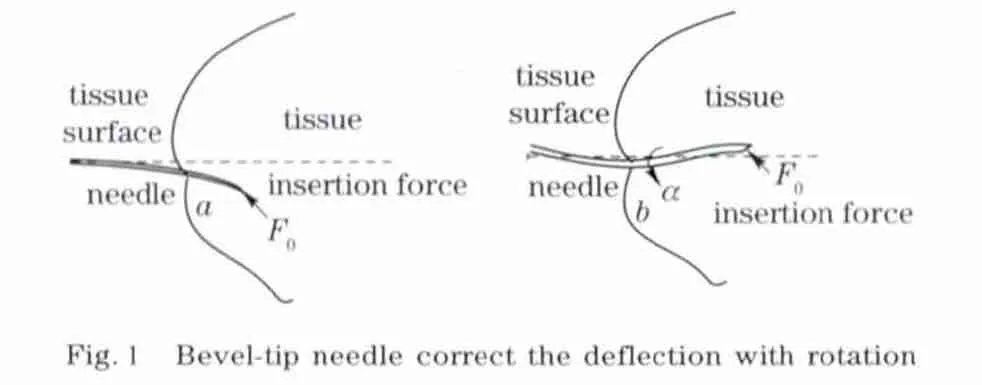
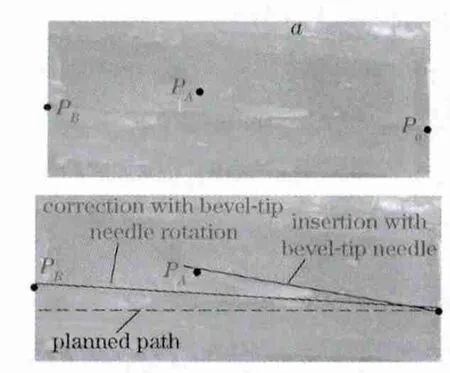
Fig.2 Needle penetration trajectory correction with rotating bevel-tip needle
While the problem seems like to be a“black box”unable to be solved well,the fuzzy control that works like the human brain is suitable to solve the problem[8].With this method,how the tissue properties effect the interaction between the tissue and the needle is not essential to know in detail.The experience and knowledge from the experts are concluded as rules to control the needle deflection compensation.
1 Experimental setup
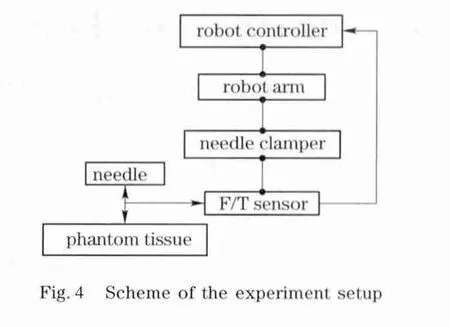
The experiments are carried through on the test-bed(Fig.3).The schematic flow chart of the setup is described in Fig.4,a Fanuc LR Mate-200iC industry robot with 6 degrees of freedom(DOF)provides the translational motion in the needle insertion.A needle clamp fastener connects the needle with the ATI Nano 17 6-DOF force/torque sensor.The combination of fastener and force sensor is mounted to the industry robot’s wrist.The needles are from Shenzhen Feanton Science &Technical Co.Phantom tissue made of gelatin from Sigma-Aldrich Co.is used to substitute the soft tissue.
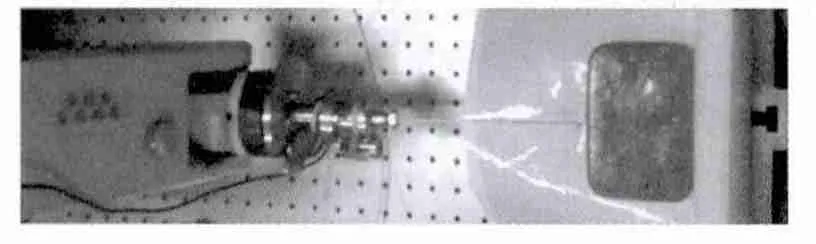
Fig.3 Experimental setup shown with Fanuc robot,clamp fastener connecting needle and F/T sensor,phantom tissue
2 Accomplishment for fuzzycontrol system to correct needle deflection
According to Fig.5the physical inputs are converted into a fuzzy set through the fuzzification process.Then the fuzzy sets are approximately reasoned through the inference engine.At last the results are converted into the point-wise value of the control output,applying on the needle to correct the deflection.
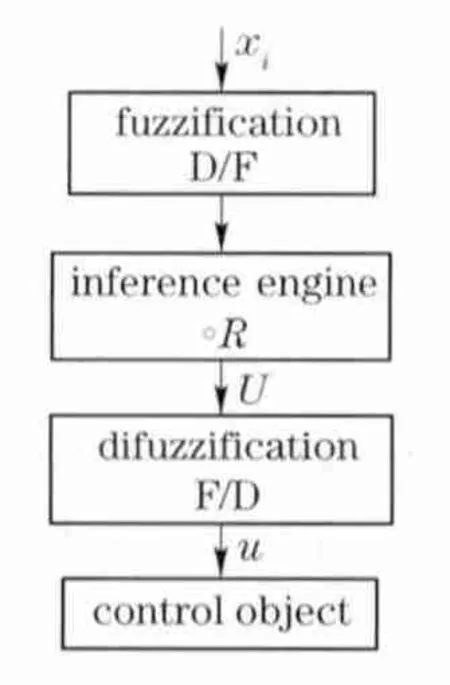
Fig.5 Scheme of needle deflection correcting fuzzy controller
2.1 Fuzzification module
Fig.6illustrates the process of the theoretical force for the needle deflection and the actual force with the needle 180°rotating,which is aimed to get the theoretical force for correction.The fuzzy controller can only deal with the fuzzy sets,which are described by linguistic notions.The fuzzification module performs the so-called fuzzification process to successively convert a point-wise current value into a representation of the process state variable which is a fuzzy set.
For the needle deflection correction fuzzy con-troller,the physical input is the angleβ,formed by the forceFAacting on the needle after the needle rotates around its own axis and the forceFOcorrecting the theoretical deflection.
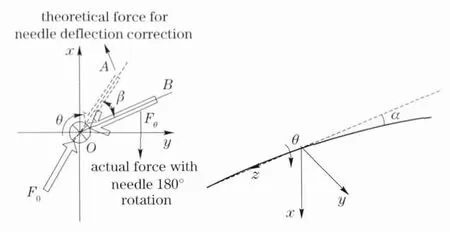
Fig.6 Status for needle rotatesθ
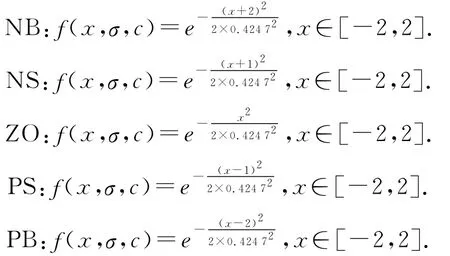
The linguistic notions should have been converted into a single point-wise value to be accepted to accomplish the control task.The membership function is used to give the quantitative interpretation of the linguistic notions.The normalfunction is chosen as the membership function while to describe the human-like control activities.Here the Gaussian function is adopted[9-10].
The membership function for the fuzzification module can be figured in Fig.8.
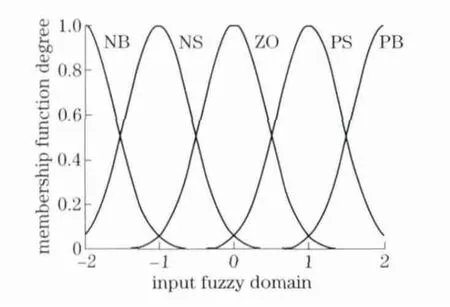
Fig.8 Scheme of membership for the needle deflection correcting fuzzy controller
The functions are as follows:
2.2 Inference engine
The output from the fuzzification module need to be approximately reasoned by the inference engine module,which is consist of some knowledge base rules.The knowledge based rules for the needle deflection correcting fuzzy controller can be summarized as follows:
If(InputTangleDeviation is)NB then (OutputTangle is)PB.
If(InputTangleDeviation is)NS then (OutputTangle is)PS.
If(InputTangleDeviation is)ZE then (OutputTangle is)ZE.
If(InputTangleDeviation is)PS then (OutputTangle is)NS.
If(InputTangleDeviation is)PB then(Output-Tangle is)NB.

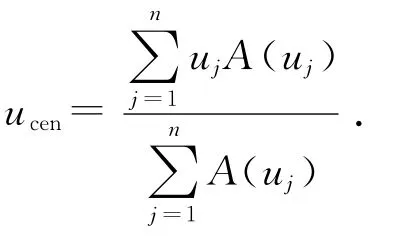
2.3 Defuzzification module
The outputs from the inference engine are the fuzzy sets which cannot be applied to the controlled objectives.The defuzzification module is built to convert the set of the control outputs into a single point-wise value.The center-of-area method is the best well-known defuzzification method.It determines the center of the area below the combined membership function.
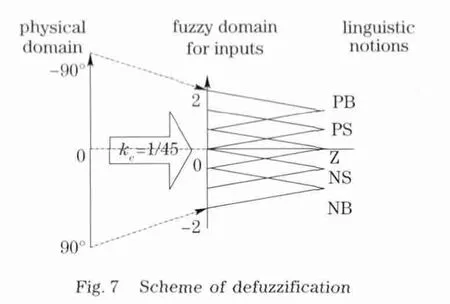
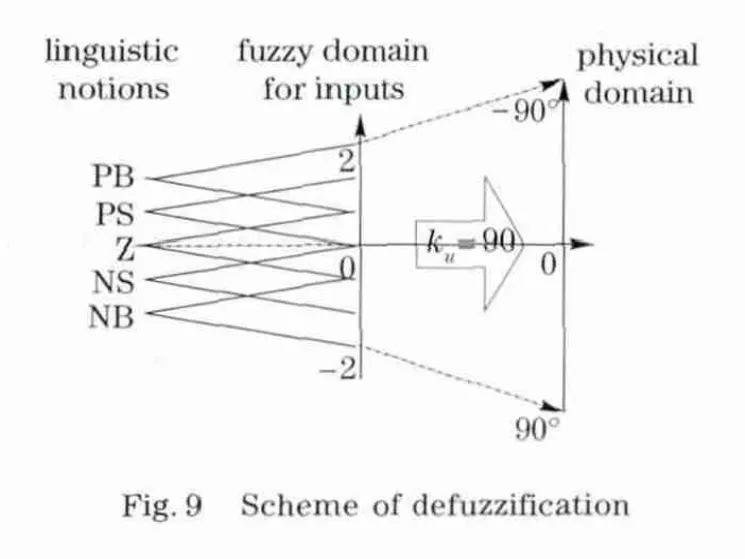
In Fig.6,θis defined as the physical domain accordingly,which is onto[-180°,180°]in quantity.Like the fuzzification module the linguistic notions are PB,PS,Z,NS,NB,and the fuzzy domain is onto[-m,m].The scaling factor iske=.The inputs’physical domain is ontoU=[-u,u],u>0,and its fuzzy domain is ontoM=[-m,m],m>0.Whenm=2,ke=u/m=180/2=90,the relation is described in Fig.9.
3 Experiments of the needle deflection correctingfuzzycontrol
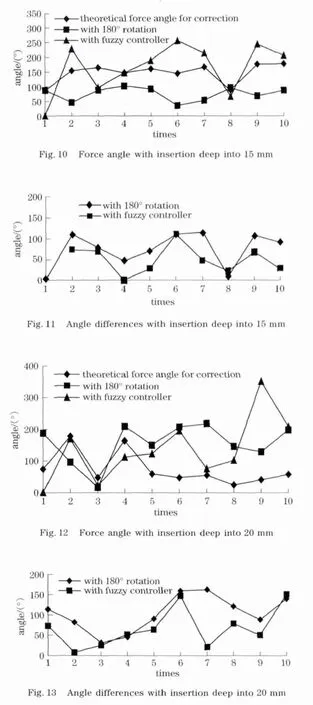
Experiments are made on the best-bed (Fig.2)to verify the fuzzy controller,needle insertion deep into the phantom 15mm and 20mm are carried out.The forces acting on the needle are gotten with the force/torque sensor,and the force angles are calculated with a MATLAB program.All the results are listed in Fig.10-Fig.13and Tab.1-Tab.2.
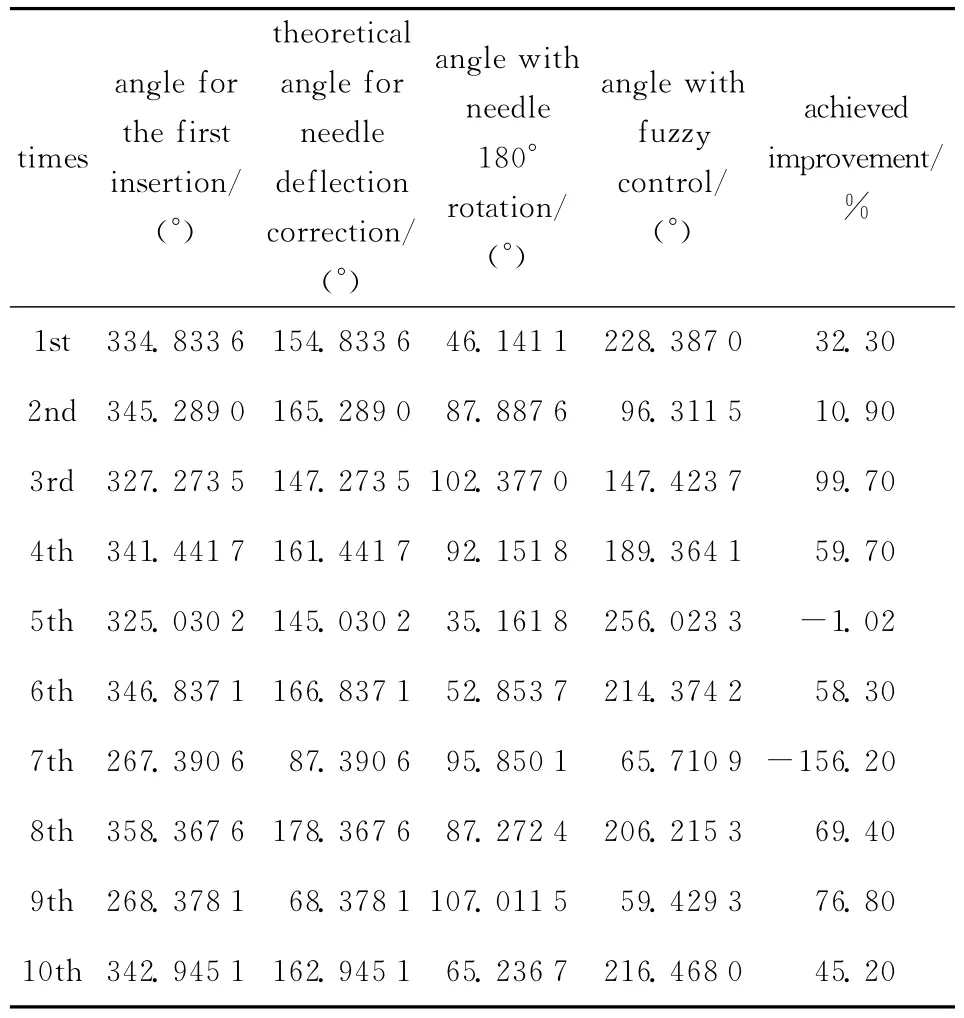
Tab.1 Results with fuzzy control for needle insertion deep into 15 mm
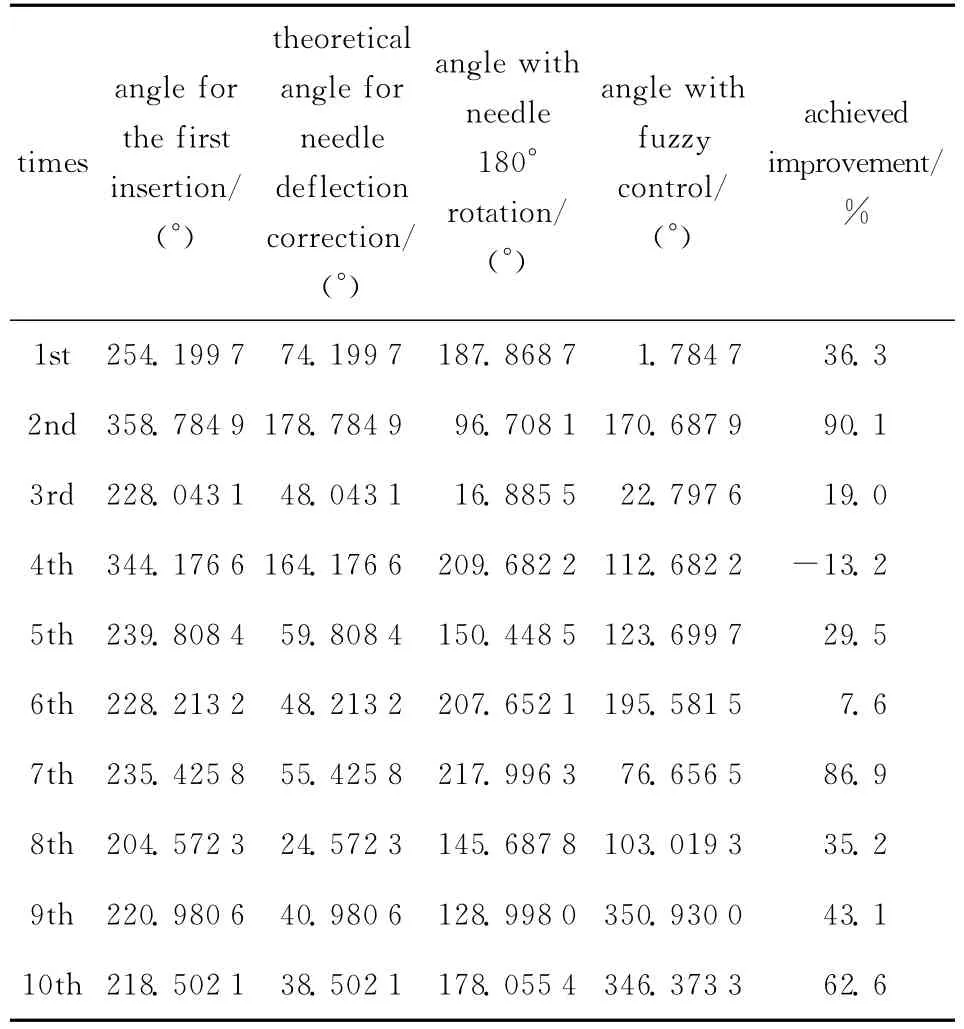
Tab.2 Results with fuzzy control for needle insertion deep into 20 mm
4 Physical domain Modification for the fuzzycontroller
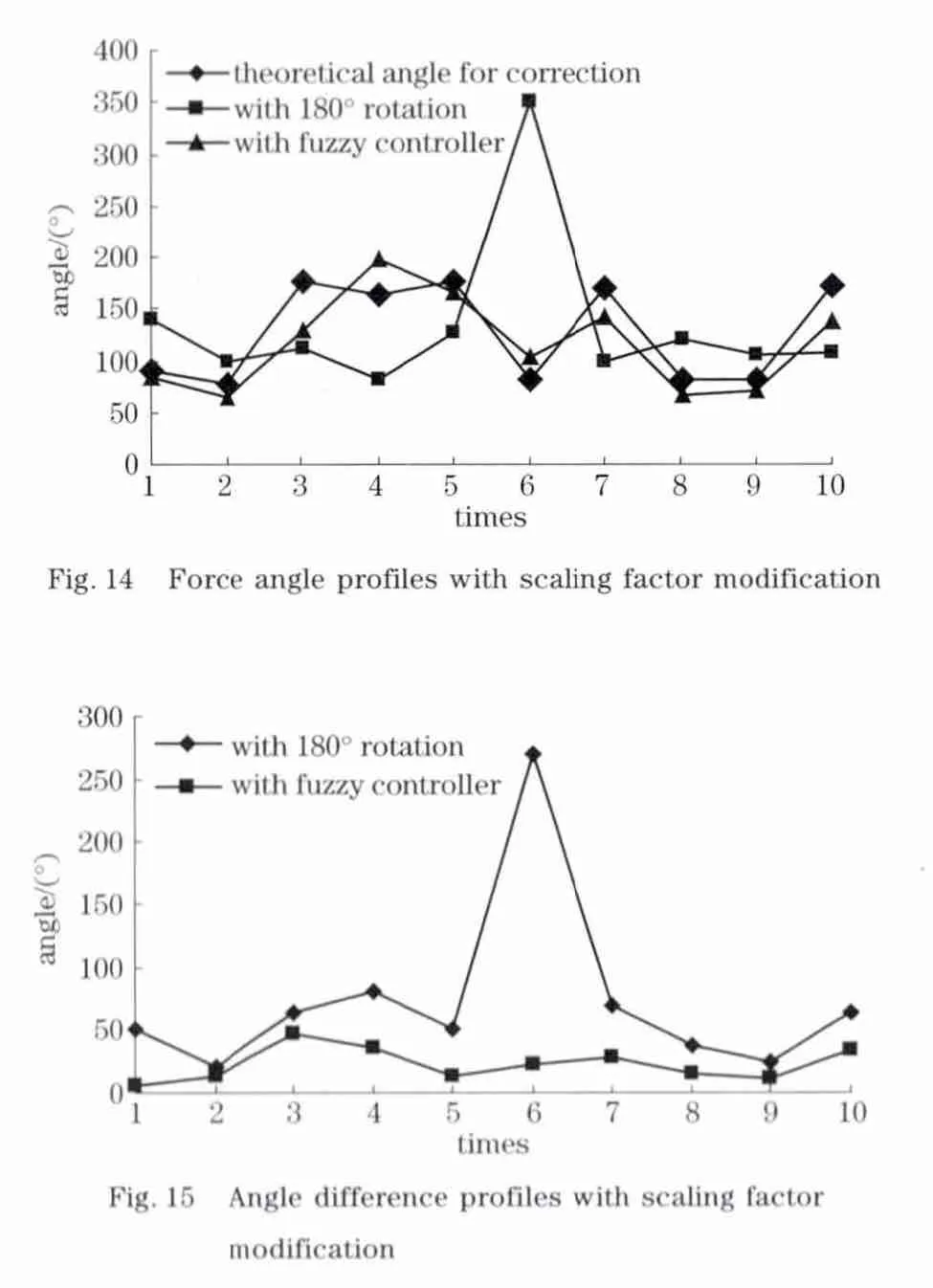
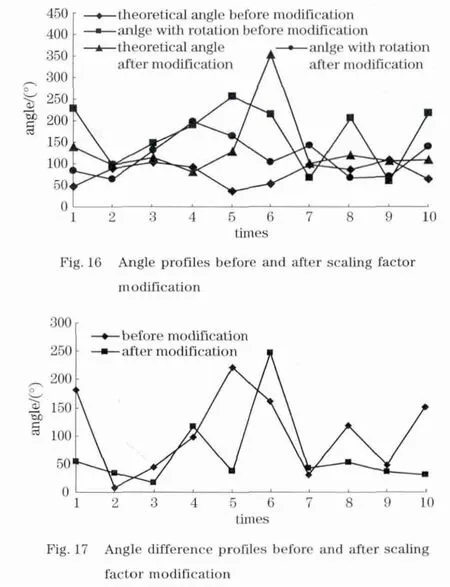
There are some problems during the aforementioned experiments,one of which is the inputβexceeded the physical domain.So the physical domain needs to be modified to [-180°,180°],and the scaling factor is modified toke=1/90.With the modified fuzzy controller,insertions of 15mm deep into phantom are carried out,and the results are listed in Tab.3and Figs.14-17.
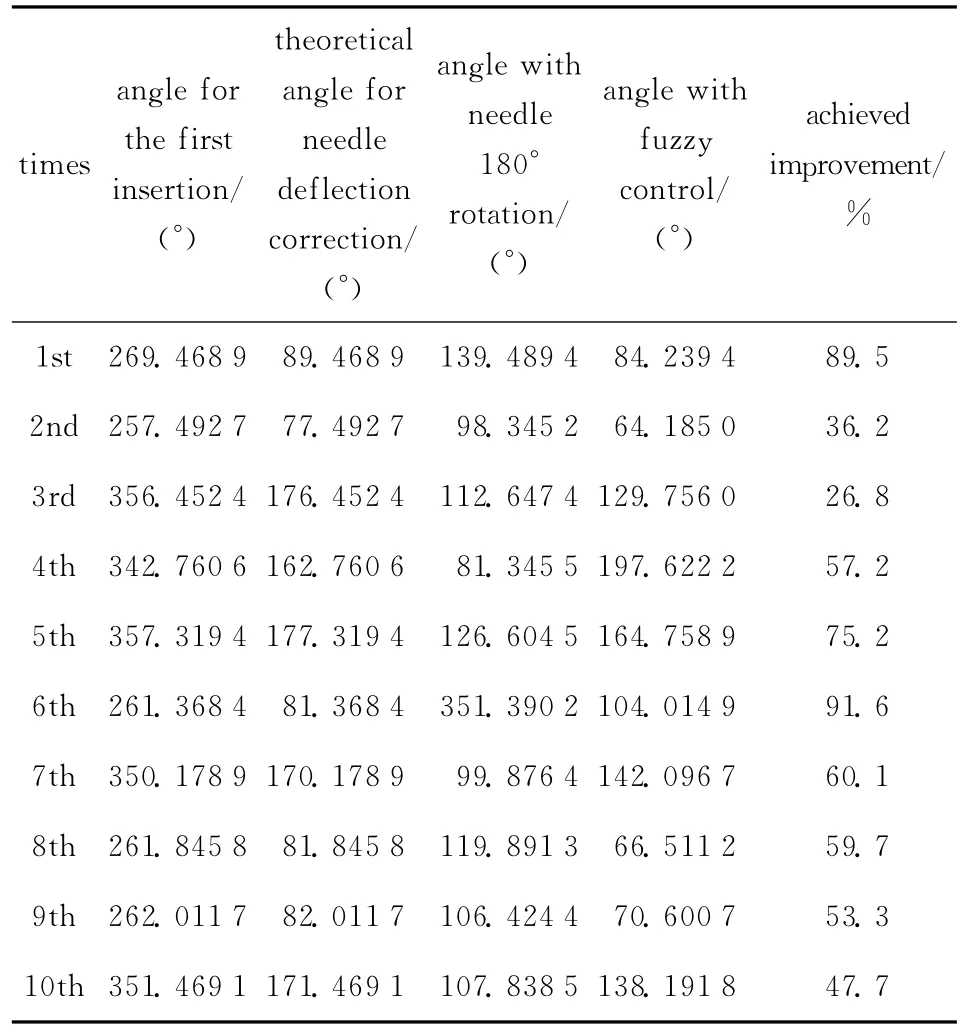
Tab.3 Results with scaling factor modified fuzzy control for 15 mm-deep needle insertion
5 Conclusions
The experiments illustrate that the fuzzy controller for the needle deflection correction performs better than the method of rotating the needle 180°to generate theoretical force to correct the deflection into the tissue,with the achieved improvements 45.23%,41.03%and 47.89%respectively.The results demonstrate that this method is much more adaptive to the inconsistent mechanics tissues.
However,there are still some deficiencies,like the 5th and 7th experiments in Tab.1,the 4th experiment in Tab.2.The fuzzy controller set up for the experiments is based on the experiences,especially the membership function.The force to correct the deflection is not perfect,so some better method should be taken to build better membership function,which can better indicates the tissues’mechanics.Hence neural net and support vector machine(SVM)should be incorporated into the fuzzy controller to deal with the force data to get a better membership function and fuzzy controller.
[1] Dong Sookwon,Ki Ukkyung,Sung Minkwon,et al.Realistic force reflection in a spine biopsy simulator[J].Proceedings of the 2001IEEE International Conference on Robotics &Automation,2001,2:1358-1363.
[2] Zovampvoc A,Davies B L.A robotic system for blood sampling[J].Information Technology in Biomedicine,2000,4(1):8-14.
[3] Rizun P R,Deon F L,Sutherland G R.Robot-assisted neurosurgery[J].Semin Laporasc Surg,2004,11(2):99-106.
[4] Wei Zhouping,Wan Gang,Gardi L,et al.Robot-assisted 3D-TRUS guided prostate brachytherapy:system integration and validation[J].Journal of the AAPM and of the COMP/CCPM/IOMP,2004,2004,31(3):539-48.
[5] Alterovitz R,Goldberg K Y,Pouliot J,et al.Sensorless motion planning for medical needle insertion in deformation tissues[J].Information Technology in Biomedicine,2009,13(2):217-225.
[6] Roberson P L,Narayana V,McShan D L,et al.Source placement error for permanent implant of the prostate[J].Journal of the AAPM and of the COMP/CCPM/IOMP 1997,1997,24(2):251-257.
[7] Carr J J,Hemler P F,Halford P W,et al.Stereotactic localization of breast lesions:how it works and method to improve accuracy[J].Radio Graphics,2001,21:463-473.
[8] Abolhassani N,Patel R V.Deflection of a flexible needle during insertion into soft tissue[C]∥Proceedings of the Annual International Conference of the IEEE EMBS.New York,USA:Engineering in Medicine and Biology Society,2006:3858-3861.
[9] Hiroyuki Kataoka,Toshikatsu Washio,Michel A,et al.A model for relations between needle deflection,force and thickness on needle penetration[M].Netherlands:MICCAI,2001:966-974.
[10] Shi Xinmin, Hao Zhengqing.Fuzzy control and MATLAB simulation[M].Beijing:Tsinghua University Press,2008:22-24.(in Chinese)
猜你喜欢
Chinese Physics B(2022年10期)2022-10-26 09:47:10
早期教育(家庭教育)(2022年10期)2022-05-30 10:48:04
Chinese Physics B(2021年7期)2021-07-30 07:41:02
科学与财富(2021年36期)2021-05-10 21:01:21
中华儿女(2020年22期)2020-02-09 03:02:34
科学大众(中学)(2018年10期)2018-12-27 13:31:36
——专访淮南寿阳眼镜总经理金鑫
中国眼镜科技杂志(2018年21期)2018-11-13 01:24:56
小小说大世界(2018年6期)2018-07-19 14:54:00
Journal of Beijing Institute of Technology(2015年4期)2015-04-22 02:33:18
Journal of Beijing Institute of Technology(2013年2期)2013-11-05 07:30:46
 Journal of Beijing Institute of Technology2013年4期
Journal of Beijing Institute of Technology2013年4期
- Journal of Beijing Institute of Technology的其它文章
- Numerical simulations of stress wavepropagation and attenuation at arc-shaped interface inlayered SiC/Al composite
- Acylation of 3,4-Diaminofurazan
- Low spurious noise frequencysynthesis based on a DDS-driven wideband PLL architecture
- Simulation of multiphase boost DC-DC converter with the stable control strategy
- Design,analysis and control for an antarctic modular manipulator
- Numerical studyon the shock responses of submunition dropon various mediums