
大展弦比飞翼布局模型验证机飞 行 控 制 技 术 研 究
2013-11-04 03:01刘尚民孙健刘朝君
飞行力学 2013年6期
刘尚民, 孙健, 刘朝君
(中国飞行试验研究院 飞机所, 陕西 西安 710089)
大展弦比飞翼布局模型验证机飞行控制技术研究
刘尚民, 孙健, 刘朝君
(中国飞行试验研究院 飞机所, 陕西 西安 710089)
飞翼布局飞机由于采用了翼身融合技术和无尾布局,具有隐形特性,军事和民用的应用潜力十分巨大。由于飞翼布局飞机本体静稳定性差,航向又不稳定,不易操纵,因此需要解决控制律和多操纵面的协调控制技术。以一种大展弦比飞翼布局模型验证机为研究对象,开展了大展弦比飞翼布局无人机的飞行控制技术研究。通过仿真手段,验证了所提出的飞翼布局无人机的飞行控制及多操纵面协调控制技术的合理性。
飞翼布局; 控制律; 多操纵面协调控制
0 引言
美国在飞翼布局作战飞机及无人机研制方面已经取得了巨大进展,在海湾战争中,多次出动B2远程轰炸机对军事目标进行轰炸,取得了战争的主动权,展示了远程隐形轰炸机的优越性和优势。美国利用X-48开展了飞翼布局的气动和飞行控制技术研究,X-47B无人机在航母上成功起飞和着舰的高姿态亮相,为发展舰载作战无人机提供了发展方向,飞翼布局隐形作战无人机在未来战争中是必不可少的利器。
飞翼布局飞行器由于采用翼身融合和无尾布局设计,隐形能力好,同时减轻了飞机的重量,诱导阻力小,升阻比高,这是飞翼布局飞机的主要优点[1]。但飞翼布局飞机是无尾布局,航向稳定性较差,低速时纵向操纵效率较低,需要多翼面协调控制。如何解决飞翼布局无人机的飞行控制技术,改善飞翼布局无人机的飞行品质,则需要进一步的研究。
鉴于飞翼布局飞行器的诸多优势,近年来许多国家将飞翼布局设计技术应用在无人机研究领域。针对飞翼布局无人机的气动特性,本文以一种大展弦比飞翼布局模型验证机为研究对象,利用飞翼布局模型验证机工程估算的气动数据,建立了飞行动力学模型,根据大展弦比飞翼布局无人机气动特性和无人机的控制技术设计了控制律,规定了不同操纵面的控制功能和权限,并通过仿真手段验证了飞翼布局无人机的飞行控制技术及多操纵面协调控制技术的合理性。
1大展弦比飞翼气动布局无人机的
操稳特性
飞翼布局无人机由于没有垂尾,因此航向稳定性较差。对于大展弦比飞翼布局无人机来说,最有效的航向控制莫过于阻力方向舵,其很长的力臂几乎是无人机展长的一半,使得阻力方向舵无需太大的偏角,就能够产生足够大的偏航力矩,尤其在起降阶段,采用阻力舵全打开方式,有利于提高飞翼布局无人机的航向稳定性[2]。另外,飞翼布局无人机没有平尾,升降舵在机翼上,与常规布局飞机相比纵向操纵力臂较短,升降舵操纵效能较小,尤其在起飞和着陆低速飞行时影响更大。为了解决这个问题,一般采用纵向静稳定性适度放宽技术,重心在无人机焦点附近,同时采用多翼面协调控制方法进行气动补偿来提高纵向操纵效能[3]。但这样又会使无人机本体静稳定性变差,不易操纵,航向又不稳定。如何解决其操稳特性,需要借助飞控系统增稳和多翼面协调控制,控制律设计成为关键。
本文研究的模型验证机设计了4组操纵面,如图1所示。

图1 大展弦比飞翼布局模型验证操纵面Fig.1 Effectors of the high-aspect-ratio flying wing model
为了解决纵向操纵效能低的问题,将操纵面1~3组合在一起联动进行纵向操纵,以提高纵向操纵效能,操纵面3还作为副翼操纵使用,操纵面4设计成阻力方向舵[4]。
2 数学模型及控制律
2.1 数学模型
飞翼布局模型验证机由于操纵面在机翼上,升降舵的偏转对机翼的升力影响较大,因此应考虑升降舵产生的升力,而常规布局飞机升降舵产生的升力可忽略不计。本文对一种大展弦比无人机采用工程估算法获得气动导数,主要是为了设计飞翼布局模型验证机的控制律并通过仿真手段进行验证。其数学模型如下:
气动系数计算式为:
CL=CLαα+CLqq+CLδe1δe1+
CLδe2δe2+CLδe3δe3
(1)
CD=CD0+ACLCL+CDδrδr
(2)
CY=CYββ+CYpp+CYrr
(3)
Cl=Clββ+Clpp+Clrr+Clδa3δa3+Clδa4δa4
(4)
Cm=Cmαα+Cmqq+Cmδe1δe1+
Cmδe2δe2+Cmδe3δe3
(5)
Cn=Cnββ+Cnpp+Cnrr+Cnδa3δa3+
Cnδa4δa4+Cnδr4δr4
(6)
仿真动力学模型采用六自由度刚体飞行动力学运动方程。
2.2 控制律
控制律方框图如图2所示。
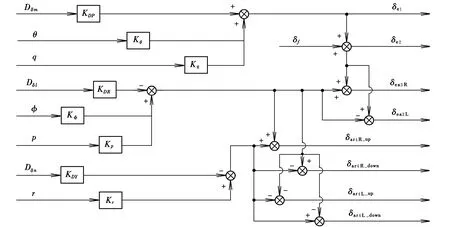
图2 飞翼布局无人机控制律方框图Fig.2 Block diagram for control law of flying wing UAV
根据飞翼气动布局模型验证机的特性,设计了一组升降舵、一组升降襟翼、一组升降副翼、一组副翼阻力舵等共10个操纵面。其中:δe1为升降舵,δe2为升降襟翼,δea3为升降副翼,δar4为副翼阻力舵,Dδm为纵向杆输入,Dδl为侧向杆输入,Dδ n为脚蹬输入[5]。
3 仿真结果及分析
由于飞翼布局模型验证机的特殊气动特性,需要借助飞控系统来增稳,因此控制律是一项关键技术。通过仿真手段,进行飞翼布局模型验证机自主爬升、下滑、平飞、定航、盘旋等控制律的验证。纵向仿真初始条件为:H=2 km,V=150 km/h,φ=0°,ψ=0°,θ=50°,仿真结果如图3所示。

图3 纵向配平仿真结果Fig.3 Longitudinal trimming simulation
从图中可以看出,从θ=50°控制到平飞状态,稳定在θ=1.8°,α=1.7°。
横向仿真初始条件为:H=2 km,V=150 km/h,φ=50°,ψ=0°,θ=3°,仿真结果如图4所示。
从图中可以看出,从φ=50°控制并稳定到平飞状态。
在仿真过程中,飞翼布局模型验证机纵向操纵力矩偏小,采用单一的升降舵操纵效率较低,尤其在起降阶段速度较小,操纵效率更低,因此需要多翼面协调控制。本文设计了升降舵、升降襟翼和升降副翼6个活动翼面协调控制,提高了纵向操纵效率,达到了预期效果。
另外,飞翼布局模型验证机没有垂尾,航向稳定性较差,本文设计了阻力方向舵以增加航向稳定性并参与航向操纵,但由于升降副翼又参与纵向操纵,会降低横向操纵效率,因此将阻力方向舵设计成副翼阻力舵,以补偿横向的操纵效率。
根据这种设计思想并结合飞翼布局模型验证机的气动特性,设计的控制律通过仿真验证,满足大展弦比飞翼布局模型验证机的飞行控制要求。

图4 横向配平仿真结果Fig.4 Lateral trimming simulation
4 结束语
本文分析了大展弦比飞翼气动布局模型验证机的操稳特性,根据飞翼布局模型验证机的气动特性和飞行控制方法,设计了控制律,建立了数学模型。通过仿真的手段,验证了控制律,了解了飞翼气动布局无人机的飞行特性和多翼面协调飞行控制方法。本文对研究飞翼气动布局无人机的飞行控制技术具有参考价值。
[1] 程雪梅.飞翼布局无人机的稳定与操纵特性分析研究[J].飞行力学,2011,29(1):9-12.
[2] 赵霞,秦燕华.一种飞翼布局横航向特性的控制研究[J].空气动力学学报,2008,26(2):234-238.
[3] 李淼,王立新,李林.小展弦比飞翼构型飞机短周期品质评定方法[J].飞行力学,2009,27(5):21-24.
[4] 马超,李林,王立新.大展弦比飞翼布局飞机新型操纵面设计[J].北京航空航天大学学报,2007,33(2):149-153.
[5] 刘尚民,赵磊.电传飞机模型自由飞试验飞行控制技术研究[J].飞行力学,2012,30(1):83-86.
Researchonflightcontroltechnologyofthehigh-aspect-ratioflyingwingmodelaircraft
LIU Shang-min, SUN Jian, LIU Zhao-jun
(Aircraft Flight Test Technology Institute, CFTE, Xi’an 710089, China)
Flying wings have a great potential both in civil and military for the stealth characteristics due to the use of blended wing-body and tailless configuration technology. Since the aircraft with flying wings have poor static stability, unstable heading, not easy to control, so it is necessary to master the control law and coordinated control technology of multi-effectors. Taking the high-aspect-ratio flying wing model aircraft as the research object, this paper studies the flight control technology of the high-aspect-ratio flying wing UAV through simulation so as to verify the flight control technology and coordinated control technology of multi-effectors.
flying wing configuration; control law; coordinated control of multi-effectors
V212.1; V249.1
A
1002-0853(2013)06-0558-03
2013-03-01;
2013-08-02; < class="emphasis_bold">网络出版时间
时间:2013-10-22 15:10
刘尚民(1963-),男,陕西西安人,研究员,硕士,主要从事飞行力学研究。
(编辑:姚妙慧)
猜你喜欢
智能制造(2021年4期)2021-11-04
西安航空学院学报(2021年3期)2021-10-14
机械设计与制造(2021年2期)2021-03-05
民用飞机设计与研究(2020年1期)2020-05-21
兵器装备工程学报(2020年3期)2020-04-22
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
北京航空航天大学学报(2017年8期)2017-12-20
北京航空航天大学学报(2017年3期)2017-11-23
安徽农学通报(2017年18期)2017-10-18
