
考虑驾驶员认知过程的高速公路施工区MVMS前置距离计算模型*
2013-11-04 06:54许洪国戴彤焱王君祥
交通信息与安全 2013年2期
吴 彪 许洪国 戴彤焱 王君祥
(1.黑龙江工程学院汽车与交通工程学院 哈尔滨 150050;2.吉林大学交通学院 长春 130025;3.黑龙江工程学院数学系 哈尔滨 150050)
0 引言
高速公路养护施工作业时通常不会中断交通,施工区易造成行车环境突变,干扰正常交通流,引起交通冲突,增加行车风险,甚至诱发交通事故。只有适时准确地将养护施工信息传递给通行车辆的驾驶员,才能有效减少交通堵塞、降低行车风险[1]。因此,开展高速公路养护施工信息发布方面的研究具有重要的理论意义和应用价值。
交通信息发布方式主要有VMS、CSLS、交通广播、车载终端、互联网和声讯电话等[2],其中VMS是较为常用且技术较为成熟的方式之一,也是最常用的交通信息获取途径[3]。目前,国内外学者就VMS的研究,主要集中在VMS设置[1,4]、驾驶员反应[5-6]及路径诱导[7]。在较大交通量下,高速公路养护施工作业区域可设置移动式可变信息标志,以便将养护施工信息及时告知驾乘人员,进而弥补固定式可变信息标志的不足。
鉴于此,本文在高速公路养护施工信息发布需求分析的基础上,从驾驶员认知心理的角度研究MVMS的视认性,建立驾驶员通过高速公路施工区时的信息处理模型,推导出施工区上游路段MVMS前置距离计算模型。
1 养护施工信息发布需求
根据驾驶员出行前及出行中所需交通信息调查[8],驾驶员期望获取的交通诱导信息见图1。
由图1可知,驾驶员对道路养护施工信息较为关注,所以在高速公路养护施工作业期间,应采用适当的方式发布养护施工信息。
2 驾驶员移动式可变信息标志的认知模型
车辆通过高速公路施工区时,由于道路交通条件的突变,施工区内各种交通信息急剧增加、内容复杂[9],驾驶员需要处理的信息量较大。基于驾驶员认知过程[10],建立驾驶员通过高速公路施工区时的信息处理过程模型[11],见图2。
高速公路养护施工期间,要求利用施工区上游的MVMS显示“前方XX 公里封闭、车道施工”等信息,向驾驶员提示养护施工区的存在,并约束其驾驶行为。驾驶员对MVMS的认知过程,见图3。

图1 驾驶员期望的交通信息Fig.1 Driver's desired traffic information

图2 驾驶员信息处理过程模型Fig.2 Model on traffic information processing of driver
由图3可知,在车辆行驶过程中,驾驶员通常在视认点A 处已发现F 点的MVMS,但直到车辆行驶至B 点才能看清MVMS的内容,并开始读取MVMS上的信息,到C 点时读完该信息;读完MVMS后,驾驶员在C 点开始做出相应反应,行驶至E 点反应完毕,从这一刻开始采取行动,驾驶员这段时间内须完成变换车道、减速或停车等驾驶行为。
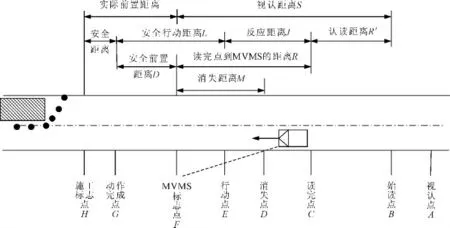
图3 驾驶员认读MVMS标志过程Fig.3 Process on driver’s cognition of mobile variable message signs
从读完点C 到MVMS 所在点F 之间的距离,可用图4进一步说明。

图4 认知MVMS的消失距离Fig.4 Disappeared distance of cognizing mobile variable message signs
从B 点到C 点的距离称为MVMS的认读距离R′,从B 点到F 点的距离称为MVMS的视认距离S,从读完点C 到MVMS设置点F的距离记为R,从消失点D 到MVMS设置点F的距离为消失距离M。在行动距离L 内,驾驶员要完成变换车道和减速等驾驶行为,需满足式(1)和式(2)2个条件。

式中:(n-1)L*为变换车道所需的距离,m;n为车道数;L*为变换1个车道所需的距离,m;v1为认读标志时的速度,km/h,可采用85%运行速度或限制速度;v2为采取行动后的速度,km/h为道路阻力系数,=f+i,其中,f为滚动阻力系数,i为道路纵坡度;φ为路面附着系数;J为反应距离,m;H为MVMS 标志上缘距地面的高度,m,其值等于MVMS高度b与MVMS下缘距地面的高度(MVMS下缘距地面高度的最小高度为2.0m[12])之和;H0为驾驶员的视线高(按小型车标准,取1.2m);α为消失点与路侧MVMS顶边的仰角,取为减速(停车或改变方向)所必需的距离,m。
3 移动式可变信息标志前置距离计算模型
3.1 变换车道所需距离
变换车道行驶的最长距离发生在超越相邻车道的车辆后变换到该车道上来,该车道变换行车过程与从C、D2点的超车过程相似性。所以,可利用车辆超车过程的试验结果来计算变换1次车道所需的距离L*[1],即

式中:t2为变换1 次车道的时间,s,取6.2~6.9 s。
3.2 滚动阻力系数与路面附着系数的取值
滚动阻力系数f 与路面类型、轮胎结构和车辆行驶速度等有关,在一定类型的轮胎和车速范围内,滚动阻力系数f 可视为仅与路面状况有关的常数。通常采用的计算值,见表1[13]。

表1 各类路面滚动阻力系数f 值Tab.1 Rolling resistance coefficient of pavement
路面附着系数,主要取决于路面的粗糙程度和潮湿程度,轮胎的花纹和气压以及车速和荷载等。国内一般采用的计算值,见表2[13]。

表2 各类路面上附着系数的平均值Tab.2 Mean value of pavement adhesion coefficient
3.3 反应距离
反应距离J 指当驾驶员已看清MVMS 内容,经过判断决定采取制动措施的一瞬间到制动器真正开始起作用的那一瞬间车辆所行驶的距离。感觉和制动反应的总时间t1=2.5s,其中感觉时间取1.5s、制动反应时间取1.0s[14]。则在感觉和制动反应总时间内车辆的行驶距离为

式中:t1为感觉和制动反应的总时间,s,取2.5s。
3.4 前置距离
将式(3)和式(4)代入式(1),可得

由式(5)可得MVMS设置的前置距离

由式(6)可知,要使前置距离D 取得值最大,则要求读完点到MVMS的距离R 尽可能取最小值
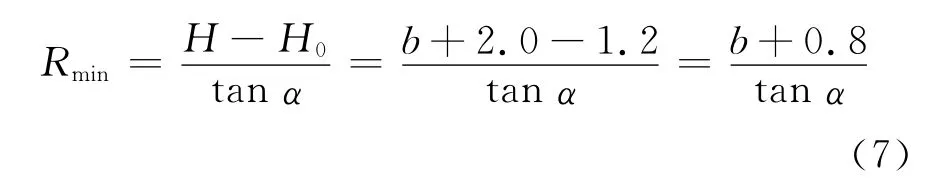
将式(7)代入式(6),可得MVMS的前置距离Dmin
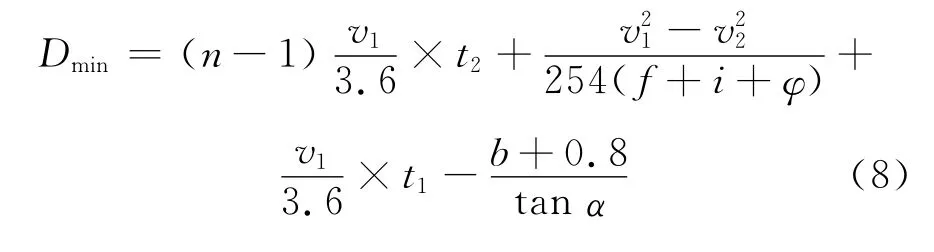
即为MVMS前置距离的理论计算公式。
工程实际中,采用实际安全前置距离作为最小安全前置距离的方法,作为交通工程师确定MVMS设置时的参考依据[4]。则按式

计算实际安全前置距离。一般取安全距离D安全=10m。
4 算例分析
4.1 施工区概况
某高速公路路段针对路面坑槽破损进行养护维修。养护维修作业控制区占用行车道,封闭车道长度约1km,封闭车道宽度3.75m,超车道开放,采用锥形交通路标进行隔离,在警告区内设有道路施工标志和限速标志,限制车速为60km/h。该高速公路施工区布设情况,见图5。
4.2 确定计算因子
为制定合理的MVMS设置方案,选取该施工区上游路段某一断面,进行车辆运行速度调查,观测车速的统计结果见表3。

图5 高速公路施工区布设示意图Fig.5 Diagram of expressway work zone layout

表3 施工区上游路段车速度调查统计描述Tab.3 Vehicle speed survey of upstream area in work zone km/h
按小型车标准,v1、v2分别取110,60km/h计算MVMS的前置距离。
根据承载车的不同,MVMS高度b的推荐尺寸分为1.4m 及2m2种情况[15],进而可确定其前置距离的计算因子取值,见表4。

表4 移动式可变信息标志前置距离的计算因子及其取值Tab.4 Calculation factors and their values of mobile variable message signs setting
4.3 计算前置距离
将表4 中计算因子取值代入式(8),即得MVMS的理论前置距离约为320m;则其实际安全前置距离约为330m。
5 结束语
MVMS类似于路侧小型VMS,是交通信息发布系统的重要组成部分,主要用于高速公路养护施工作业,提前将道路施工情况告知驾驶员,防止施工区通过车辆发生交通事故。合理设置MVMS,是高速公路施工区行车风险控制的有效措施之一。从交通信息需求调查着手,阐明驾驶员对高速公路养护施工信息较为关注。基于驾驶员认知特性,建立高速公路养护施工条件下驾驶员MVMS认知模型和前置距离计算模型,对改善施工区行车环境、降低施工区行车风险非常必要,研究成果为高速公路施工区交通组织与安全管理提供了理论依据。
[1]王 娟.高速公路可变信息标志发布内容与设置位置研究[D].西安:长安大学,2009.
[2]王建军,邓亚娟.路网环境下高速公路交通事故影响传播分析与控制[M].北京:科学出版社,2010.
[3]郑荣莉.高速公路二次交通事故预警及信息发布研究[D].西安:长安大学,2010.
[4]刘 军,张 义.基于行车安全的高速公路雾区可变情报板设置研究[J].交通标准化,2011(1):40-43.
[5]Wardman M,Bonsall P W,Shires J D.Driver response to variable message signs:a stated preference investigation[J].Transportation Research Part C,1997,5(6):389-405.
[6]Chatterjee K,Hounsell N B,Firmin P E,et al.Driver response to variable message sign information in London[J].Transportation Research Part C,2002(10):149-169.
[7]Erke A,Sagberg F,Hagman R.Effects of route guidance variable message signs(VMS)on driver behavior[J].Transportation Research Part F,2007,10(6):447-457.
[8]张 兵.基于GIS的交通信息发布系统研究[D].长春:吉林大学,2007.
[9]戴彤宇,裴玉龙,陈 瑜.基于驾驶员信息处理能力的高速公路作业区限速值计算方法[J].公路交通科技,2007,24(9):127-131.
[10]Dianni Parkera.Driving errors,driving violations and accident involvement[J].Ergonomics,1995,38(5):1036-1048.
[11]张文会.高速公路交通事故现场区划安全测度研究[D].长春:吉林大学,2010.
[12]王建军,徐秀芹,吴海刚.基于动态交通组织的高速公路可变信息标志设计探讨[J].公路,2008(11):124-128.
[13]杨少伟.道路勘测设计[M].北京:人民交通出版社,2004.
[14]任福田.交通工程心理学[M].北京:北京工业大学出版社,1993.
[15]艾少龙,李 莉.高速公路可变信息发布系统建设方案[J].中国交通信息化,2012(1):112-114.
猜你喜欢
体育教学(2022年4期)2022-05-05
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国生殖健康(2020年5期)2021-01-18
中国交通信息化(2020年11期)2021-01-14
教书育人(2020年11期)2020-11-26
当代陕西(2020年13期)2020-08-24
启蒙(3-7岁)(2019年5期)2019-06-27
漫画月刊·哈版(2019年4期)2019-04-18
中国生殖健康(2018年5期)2018-11-06
