
解无约束优化的非单调自适应信赖域算法
2013-11-02 00:33曾刘拴
重庆工商大学学报(自然科学版) 2013年11期
曾刘拴
(重庆大学 数学与统计学院,重庆401331)
0 引言
本文考虑无约束最优化问题:

其中,f(x):Rn→R二阶连续可微且有下界。信赖域方法是一种迭代方法,在每次迭代中,试探步dk可通过求解下面的子问题得到:

其中 d=xk+1-xk,gk=∇f(xk),对称阵 Bk∈Rn×n是∇2f(xk)或其近似,Δk>0 是信赖域半径,‖.‖是向量范数或由它导出的矩阵范数。由式(2)求得的试探步d是否被接受,取决于两个下降量的比值,即,其k中Aredk=f(xk)-f(xk+dk)表示实际下降量,Predk=φk(0)-φk(dk)表示预测下降量。
无约束信赖域方法的收敛结果是由Powell[1]首次得到的,后经许多学者的研究,信赖域方法得到了很好地发展,已经成为优化算法两大分支之一。2000年,Conn等人出版了关于信赖域方法的专著[2]。近年来,非单调线搜索技术得到广泛应用,此方法是Grippo等[3]首次提出的,因其具有较好的数值效果而得到了广泛应用。关于非单调技术的研究主要有文献[4-6]等。2008年,Mo和Gu[7]提出了一种较为简单的非单调技术,即:

并将此技术运用到信赖域方法中,获得了较好的数值效果。
自适应方法是由Sartenear[8]首次提出的,此方法可以避免信赖域半径更新的盲目性。自适应方法进一步研究的主要有文献[9-10]等。2009年,Sang和Sun[11]充分利用当前迭代点的信息提出了一种自适应方法,即令:

滤子技术是由Fletcher和Leyffer[12]提出的,其最初的目的是为了克服使用价值函数时选取罚因子的困难。2005年,Gould等[13]将滤子技术应用到一般的无约束优化问题中,提出了一个滤子信赖域方法,证明了其收敛性,并得到较理想的数值效果。
本文基于简单二次模型式(2),结合 Mo等[7]的非单调技术、Sang和 Sun[11]的自适应技术及 Gould等[13]的滤子技术提出一个非单调自适应信赖域算法。当试探步不被接受时,采用滤子技术,增加试探步被接受的可能性;如果试探步也不被滤子集接受,取dk=-,沿dk方向进行非单调Armijo线搜索,得到步长αk,从而得新的迭代点 xk+1=xk+αkdk。
1 基于二次模型的非单调滤子自适应信赖域算法
1.1 算法1(FNTR)
步1:给定 x0∈Rn,0 < ω1< ω2<1,μ0=1,δ∈(0,0.5),η∈(0,1),λ∈(0,1),ε >0。0 < c2<1 < c1,0 < c2<1<>0,γg∈=E(单位阵),初始滤子集 F0,k←0。
步 2:计算‖gk‖,若‖gk‖≤ε,则 x*=xk,停止计算,否则,转步 3。
步3:计算f(xk),Bk解信赖域子问题得试探步dk,令=xk+dk。

步5:若rk≥ω1,令xk+1=;否则,计算=g(),若被Fk接受,令xk+1=,并将加入到Fk,同时去除Fk中所有被支配的点,得到Fk+1;否则,令dk=-,求ik,使得ik是满足

的最小的非负整数,令 αk=λik,xk+1=xk+αkdk。
步6:按式(5)、式(6)更新信赖域半径,转第2步。
说明:∀i=1,2,…,n,算法1第3步中的实正定对角矩阵:

1.2 算法的收敛性
在此给出以下假设:(M)f(x)在有界闭集H={x|f(x)≤f(x0)}上二阶连续可微。为讨论问题的方便,记 T={k|rk≥ω1},S={k|加到滤子集中},A={k|rk<ω1}/S。
引理1[14]如果{B}是由算法1产生的,则对任意的k,Bk及都是正定对角阵,L≤‖B‖≤L,且存在 m1,m2>0 使得 m1≤‖‖≤m2。
引理2[11]若dk是子问题(2)的解,则有:

即有Dk+1≤Dk,所以当k∈T时结论成立。
第二种情况:k∈S
由滤子的定义知 fk+1≤fk。若 k -1∈T,则有 fk≤Dk≤Dk-1,从而有 Dk+1= ηDk+(1 - η)fk+1≤ηDk-1+(1 -η)fk=Dk,即 Dk+1≤Dk,又因 Dk+1- fk+1=η(Dk- fk+1)≥η(fk- fk+1)≥0,即 fk+1≤Dk+1,所以有 fk+1≤Dk+1≤Dk。若 k -1∈S,令 M={i|1 < i≤k,k -i∈T}。如果 M=Φ,则有 fk+1≤fk≤…≤f1≤f0=D0。
下面用数学归纳法证明Dk+1≤Dk。
因 D0=f0,所以 k=1 时有 D1=ηD0+(1 -η)f1≤ηf0+(1 - η)f0=f0=D0。假设 k=n时,有 Dn+1≤Dn,下证 k=n+1 时有 Dn+2≤Dn+1。而 Dn+2=ηDn+1+(1 - η)fn+2≤ηDn+(1 - η)fn+1=Dn+1。所以 Dk+1≤Dk成立;再证 fk+1≤Dk+1,因 Dk+1-Dk=(η-1)Dk+(1-η)fk+1=(1-η)(fk+1-Dk)。
而由上面的证明可知 Dk+1≤Dk,又1 - η >0,所以有 fk+1-Dk≤0,即 fk+1≤Dk,从而有 Dk+1=ηDk+(1 -η)fk+1≥ηfk+1+(1 - η)fk+1=fk+1。如果 M≠Φ,设 m=min{i|i∈M},则有 fk+1≤fk≤…≤fk-m+1,因 k- m∈T,由第一种情况可知 fk-m+1≤Dk-m+1≤Dk-m,而 Dk-m+2= ηDk-m+1+(1 - η)fk-m+2≤ηDk-m+(1 - η)fk-m+1=Dk-m+1。由归纳法可得 Dk+1≤Dk,从而同上可得 fk+1≤Dk+1。
综上可得当 k∈S 时,有 fk+1≤Dk+1≤Dk。
第三种情况:k∈A

则有 Dk+1< Dk,所以有 fk+1≤Dk+1≤Dk。
综合上面三种情况可知,对任意的k都有fk+1≤Dk+1≤Dk。
引理5[7]如果假设(M)成立,αk满足式(7),则对任意的k∈A都有:


反证,假设对充分大的k有‖gk‖≥ε0>0。

证明:反证,假设当k充分大时,有‖gk‖≥ε>0。
由引理4知{Dk}单调下降,又{Dk}有界,故其收敛,再由引理3和引理5得:

2 数值试验
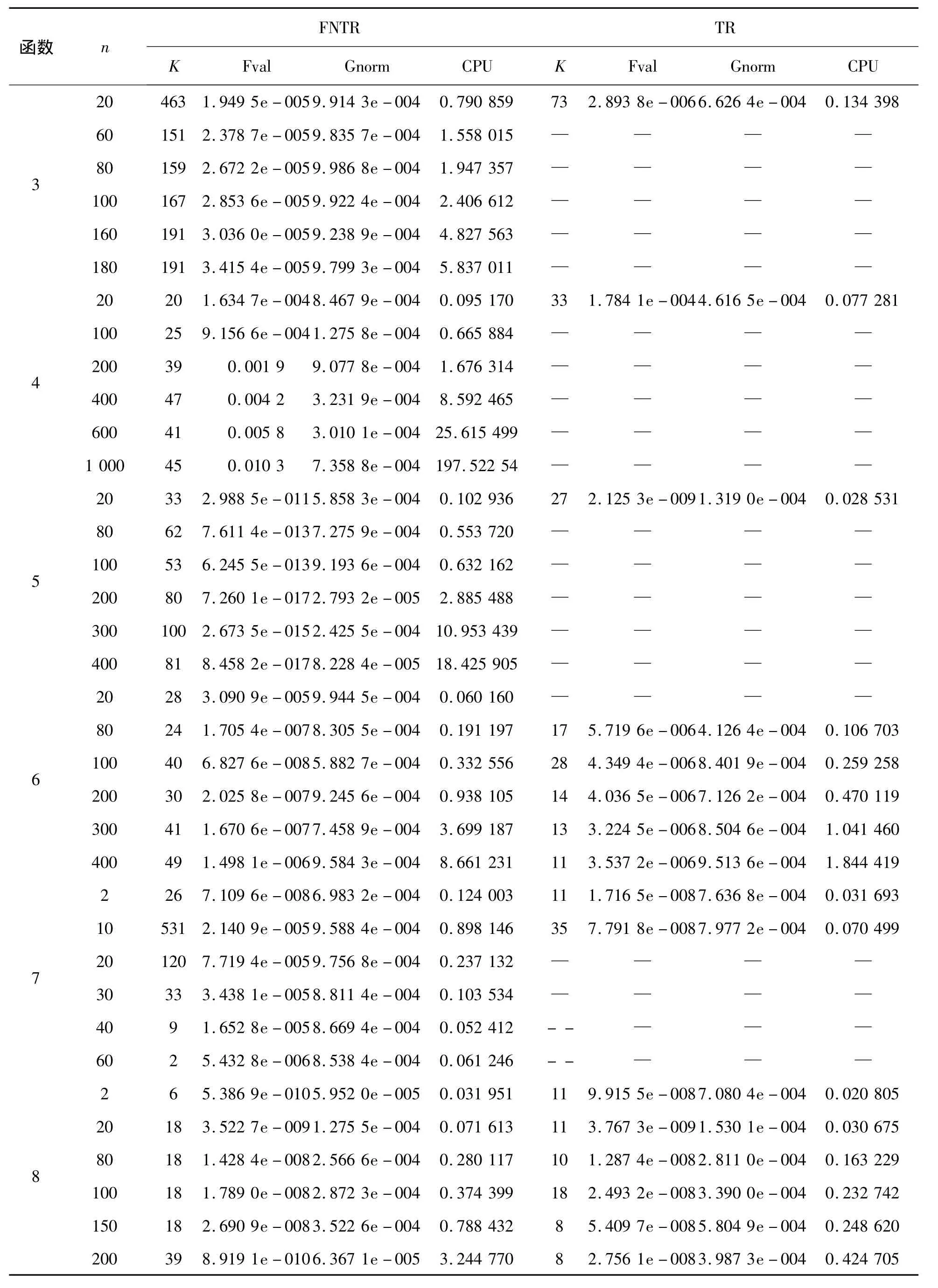
本节给出算法1(FNTR)的数值试验结果,并与基本信赖域算法(TR)(文献[15]中算法3.6.1)做比较。算法用Matlab 7.01编写程序。Fval表示最优点处的函数值,Gnorm表示迭代终止时函数梯度的范数,K表示迭代次数,CPU代表运行时间(单位为s)。设定精度‖gk‖≤10-3。检验函数取自文献[16],初始点的选取与文献[16]相同。如果计算不出结果或者时间超过200 s或者迭代次数超过1 000次,则用“—”表示。
算法1(FNTR)中,选择的参数:μ0=1,ω1=0.20,ω2=0.80,c1=1.5,c2=0.5,λ =0.5,δ=0.4,η =0.15,γg=min{0.003。检验函数如表1,数值结果如表3。其中各个函数中和的选取见表2。

表1 检验函数对应编号
表2 和的值

表2 和的值
?
3 结束语
从表3的数据可以看出,对绝大多数测试函数,算法1(FNTR)具有迭代次数较少、运行时间较短的优势,且对于测试函数中的rosex,singx,pen1,vardim,bv这些函数,在高维情况下基本信赖域算法失效,而算法1(FNTR)则可以很好地求解,因此算法1(FNTR)是比较有效的,而对于trig,ie这两个函数算法1(FNTR)的优势不太明显,有待进一步研究。

表3 算法1(FNTR)和基本信赖域算法的数值结果
续表
[1] POWELL M J D.Convergence properties of a class of minimization algorithm[C]//Nonlinear Programming II,New York,Academic Press,1975:1-27
[2]CONN A R,GOULD N I M,TOINT Ph L.Trust- Region Methods[M].SIAM Publications,2000
[3]GRIPPO L,LAMPARIELLO F,LUCIDI S.A nonmonotone line search technique for Newton’s method[J].SIAM Journal on Numerical Analysis,1986,23(4):707-716
[4]DENG N,XIAO,ZHOU F J.Nonmonotone trust region algorithm[J].Journal of Optimization Theory and Applications,1993,76(2):259-285
[5]ZHANG H,HAGER W.A nonmonotone line search technique and its application to unconstrained optimization[J].SIAM Journal on Optimization,2004,14(4):1043-1056
[6]MO J,LIU C,YAN S.A nonmonotone trust region method based on nonincreasing technique of weighted average of the successive function values[J].Journal of Computational and Applied Mathematics,2007,209(1):97-108
[7]GU Z,MO J.Incorporating nonmonotone strategies into the trust region method for unconstrained optimization[J].Computers and Mathematics withApplications,2008,55(9):2158-2172
[8]SARTENAER A.Automatic determination of an initial trust-region in nonlinear programming[J].SIAM Journal on Scientific Computing,1997,18(6):1788-1803
[9]FAN J,YUAN Y.A new trust region algorithm with trustregion radius converging to zero[C]//Proceedings of the 5th International Conference on Optimization:Techniquesand Applications,HongKong,Dec,2001
[10]ZHANG X,ZHANG J,LIAO L.An adaptive trust method and its convergence [J].Computers and Mathematics with Applications,2003,45(10-11):1469-1477
[11]SANG Z,SUN Q.A self-adaptive trust region method with line search based on a simple subproblem model[J].Journal of Computational and Applied Mathematics,2009,232(2):514-522
[12]FLETCHER R,LEYFFER S.Nonlinear programming without a penalty function[J].Mathematical Programming,2002,91(2):239-269
[13]GOULDN I,SAINVITUC,TOINTP.A filter-trust-region method for constrained optimization[J].SIAM Journal on Optimization,2005,16(2):341-357
[14]冯琳,段复建,和文龙.基于简单二次函数模型的滤子非单调信赖域方法[J].山东大学学报:理学版,2012(5):1-8
[15]袁亚湘,孙文瑜.最优化理论与方法[M].北京:科学出版社,1997
[16]MORE J,GARBOW B,HILLSTROM K.Testing uncontrained optimization software[J].ACM Trans Math Softw,1981,7(1):136-140.
猜你喜欢
安阳工学院学报(2020年4期)2020-09-11
中共济南市委党校学报(2019年1期)2019-04-04
语言与文化论坛(2019年4期)2019-03-29
能源(2018年5期)2018-06-15
行政法论丛(2018年1期)2018-05-21
小雪花·小学生快乐作文(2018年9期)2018-02-19
中国校外教育(下旬)(2017年8期)2017-10-30
孙子研究(2016年4期)2016-10-20
中国科技信息(2016年17期)2016-10-11
东北师大学报(自然科学版)(2014年1期)2014-02-27
