
一种新型四象限多电平变流器
2013-10-23 01:45高志刚廖晓钟庄亚平周德佳
电力自动化设备 2013年6期
高志刚,冬 雷,廖晓钟,庄亚平,周德佳
(1.北京理工大学 自动化学院,北京 100081;2.海军装备研究院,北京 100073)
0 引言
多电平变流器在许多大容量场合都得到了广泛的应用,在轧钢、提升机等场合,使用高压大容量多电平变流器可以实现对电机的高性能控制[1-5]。机车牵引、船舶推进等场合对变流器的体积、重量和功率密度等有较高的要求。由于机车在运行过程中频繁起停,电机制动时的能量往往通过卸荷电阻转变为热量加以消耗,造成严重的能量浪费,因此为了提高电能利用效率,一般还要求变流器具有能量双向流动能力,实现电机的四象限运行[6-7]。
采用二极管箝位型多电平变流器进行“背靠背”连接,是一种应用较多的四象限多电平变流器拓扑结构[8-10]。文献[8]将2组二极管箝位型三电平变换器背靠背连接,用于3 MW直驱型风力发电系统。然而二极管箝位型多电平变流器存在电容电压均衡问题,在三电平以上不能稳定运行[11],因此不容易扩展到6 kV以上的场合。采用级联结构的多电平变换器具有模块化程度高的优点,且通过增加级联个数可以进一步提高变换器的输出电压等级,因此在6 kV以上场合获得了广泛的应用[12-13]。为了实现四象限运行,文献[14]将传统级联H桥型变换器中的三相不控整流桥用PWM整流器代替,文献[15]利用2个H桥背靠背连接构成一个单元,级联后同样可以实现四象限运行。文献[16]则采用半桥PWM整流器,进一步降低了系统成本。然而文献[12-16]介绍的变换器中都存在工频变压器,该变压器的成本高,且体积、重量庞大,因此降低了整个变流器的功率密度,并带来了相应的载重和空间浪费。
随着磁性材料技术发展和开关器件制造技术的进步,目前采用中高频变压器组成新型多电平变流器已经得到了越来越多的重视,并产生了很多实用化成果[17-19]。本文基于中频(5 kHz)变压器,提出了一种四象限多电平变流器拓扑结构,省去了传统的工频变压器,减小了系统的体积和重量,提高了变流器的功率密度。本文提出的变流器可以直接与高压电网相接,并实现变流器网侧高功率因数。通过控制变流器的工作状态,可实现能量双向流动。由于采用了级联结构,因此变流器的扩展性好,通过增加级联个数可进一步提高工作电压。此外变流器还具有模块化程度高、维护简单的优点,因此具有较好的应用前景。
1 拓扑结构
本文提出的四象限变流器拓扑结构如图1所示,其中输入侧为高压工频交流电,经滤波电感后经过级联H桥型变流器得到多个直流电源,N表示H桥的个数。各级H桥的交流侧输出电压用uH-1、…、uH-N表示;各直流母线电压分别用Udc-1、…、Udc-N表示;各直流电源经过原边中频H桥后,变换为中频方波,分别用uM-1、…、uM-N表示;各中频方波电压经中频变压器后,再由副边中频H桥变换为直流电压,用Udc-0表示;流入中频变压器各绕组的电流分别用iT-0、…、iT-N表示;副边中频H桥的交流侧输出电压为uM-0,经三相逆变器后驱动电机。
图1的变流器中,各直流电容电压保持相同,各开关器件的电压等级相同,有利于器件选型。当需要提高输入(输出)侧的工作电压等级时,可以增加中频变压器的独立绕组个数,并采用原边(副边)各直流母线串联等形式加以实现,因此具有较好的扩展性。通过控制变流器输入侧各H桥单元的工作模式,可以实现输入电流近似正弦以及变流器的单位功率因数运行,降低谐波含量,消除变流器运行时的无功功率。
2 功率传输模型

图1 基于中频变压器的四象限变流器拓扑Fig.1 Four-quad converter topology based on middle-frequency transformer
电网电压用相量Ug表示,电感电压用相量UL表示,输入变流器的电流基波近似正弦,用相量Ig表示,变流器的输入侧各H桥的输出总电压的基波用相量UH表示,则各相量的空间近似关系如图2所示。其中,β表示电网电流滞后电网电压的角度;γ表示电感电压超前电网电流的角度,在忽略线路及滤波电感的电阻时,γ近似为90°。

图2 变流器输入侧相量图Fig.2 Input-side phasor diagram of converter
在图2规定的相位关系下,电网发出的平均功率为:

当通过控制UH,使电网电压、电流同相位时,即实现了变流器的单位功率因数运行,此时忽略电感电阻损耗,则送入变流器的功率即为电网发出的功率,如式(2)所示。

假设各开关器件理想,忽略线路电阻损耗,式(2)中注入变流器的能量一部分存储于电容之中,其余部分则流入后续各中频H桥中。因此通过改变流入变流器的电流ig,即可以实现对电容电压Udc-1、…、Udc-N的控制,控制框图如图3所示。

图3 整流器控制框图Fig.3 Block diagram of rectifier control
图3中,U*dc-total表示N个直流母线电压之和的给定值,经过PI控制器后与电网电压ug相乘,得到电感电流的给定值i*g,此时i*g为与ug相位相同的正弦信号。由于电流环的给定信号为工频交流信号,因此电流环控制器选择比例谐振(PR)调节器[4],谐振频率点设置在工频,调节器的输出为各H桥输出的总电压uH-total,每个H桥的输出电压为uH-total/N。
实际运行中由于系统非理想,各H桥的输出电压uH-1、…、uH-N不可能完全相同,因此流入各H桥的能量不同,导致各电容电压Udc-1、…、Udc-N的变化趋势不同,若不加以控制,将出现母线电容过压或欠压,导致变流器无法正常运行,危害设备安全。本文提出的方案是通过对各中频H桥的输出电压uM-1、…、uM-N以及副边中频H桥的输出电压uM-0进行控制,达到维持各电容电压平衡的目的。
各中频H桥的输出电压uH-1、…、uH-N以及uM-0均为5 kHz方波信号,经过输入电感LT后与中频变压器绕组相连。近似认为中频变压器理想,穿过各绕组的磁通相同,则此时可由图4所示的等效电路分析能量传输规律。

图4 中频变压器与中频H桥等效电路Fig.4 Equivalent circuit of middle-frequency transformer and H-bridge
图4中,各直流母线电容电压在运行时稳定于Udc,并定义特征函数,则以 uM-i为研究对象,其发出的平均功率 Pi为[17]:

其中,θij表示第i个电压与第j个电压的相位差,即θij=θi-θj,θi(i=0,1,…,N)表示电压 uM-i的相位,各电压相位均属于区间[-π,π],特别地,规定uM-0的相位为0,即θ0=0。由式(3)可以看出,在保持其余电压相位不变的情况下,通过控制θi即可改变Pi。
采用正弦函数对f(θ)进行近似逼近,并令方差最小,于是有:

求解后,得:

特征函数及逼近函数波形如图5所示。

图5 特征函数及逼近函数波形Fig.5 Waveforms of f(θ) and equivalent function
将式(5)代入式(3)并化简,近似可得各电压源输出的功率为:

在实际运行过程中,设计LT较小以节省体积和重量并减少材料使用量,各中频H桥的工作相位θi(i=0,1,…,N)均在 0 附近,因此式(6)可进一步化简为:

由于 θ0=0,代入式(7),得:

由式(7)、(8)可得:

实际系统的控制目标是平衡各直流母线电容,电容电压控制环的输出量为功率值,由此可得系统的功率控制框图如图6所示,其中j=1,2,…,N。图6中,U*dc表示各直流电容电压的给定值,Udc-0的电压环得到 P0,Udc-1、…、Udc-N的电压环输出分别为 P1、…、PN,减去 P0后再经过比例环节,得到 θ1、…、θN。

图6 电容电压控制框图Fig.6 Block diagram of capacitor voltage control
图6中所示的电容电压控制方法的运行过程如下:当第j级电容电压的实际值Udc-j小于参考电压U*dc时,控制器动作导致Pj减小,因此其工作相位减小,由此导致电容电压升高;当第j级电容电压的实际值Udc-j小于参考电压U*dc时,控制器动作导致Pj增大,因此其工作相位增大,导致电容电压降低。由该过程可知,稳定运行时,电容电压Udc-j将稳定于U*dc。图6中P0在控制过程中起前馈补偿作用,当负载功率突然增加(减小)时,Udc-0减小(增加),P0减小(增加),从而导致各中频H桥的工作相位增加(减小),达到维持电容电压Udc-0的目的。由图6的控制框图可以实现各电容电压趋于相同的给定值U*dc,即实现各电容电压的平衡控制。此时U*dc如式(10)所示:

3 调制算法及四象限运行策略
变流器的输入侧采用级联H桥型结构,各H桥的参考电压相同,由文献[4]可知,图1中第1级H桥的输出电压可以表示为:

其中,xL、xR分别为H桥左、右桥臂在一个开关周期内的脉冲净面积[4],ωc为载波频率。当 xL、xR之和为2π时,可以消去所有的开关频率奇数倍谐波。对于N级级联H桥型变流器,各级H桥的载波相位依次相差π/N时,还可以消去开关频率2Nm(m为自然数)倍之外的偶数倍谐波,因此等效开关频率将等效提高为原来的2N倍。
由此可得级联H桥型整流器的调制流程如下:
a.确定H桥的参考电压uref;
b.根据式(11),uref=[Udc-1(xL-xR)]/(2π),得xL-xR=2πuref/Udc-1;
c.为消去开关频率奇数倍谐波,有xL+xR=2π;
e.根据左、右桥臂的脉冲净面积得到脉冲波形。
其余各级H桥的左、右桥臂的计算流程相同,而计数器的初始值不同,从而实现数字载波的相移效果。
为实现电机的四象限运行,需要变流器具备能量双向流动的能力。负载侧三相逆变器采用PWM,可以输出三相参考指令电压,满足电机正反转和加减速控制。在电机加速过程中,能量由网侧流向电机侧;在电机减速过程中,能量由电机侧流向网侧。
当能量由网侧流向电机侧时,根据图3给出的控制框图,控制网侧直流母线电压之和保持为恒定值且输入侧保持单位功率因数,此时网侧电压与电流保持同相,能量由电网输送到各H桥的直流电容和负载中。系统通过采集各直流电容的电压,调整输入中频变压器各绕组的相位。此时中频变压器网侧各绕组的相位超前负载侧绕组的相位,相位差由需要从网侧传递到负载侧的能量大小决定,如图6所示。当能量由电机侧流向网侧时,此时为控制网侧直流母线电压之和保持为恒定值且输入侧保持单位功率因数,网侧电压与电流保持反相。系统根据各直流电容的电压,调整输入中频变压器各绕组的相位。此时中频变压器负载侧绕组的相位超前网侧各绕组的相位,相位差由从负载侧传递到网侧的能量大小决定。
4 实验验证
采用F28335浮点型DSP作为控制器,DSP通过数据线将数据写入CPLD,CPLD负责完成PWM信号的生成、编码以及传输。主电路采用IRF640作为开关器件,驱动芯片选择HCPL-315J。变流器输入侧采用2级H桥级联,滤波电感为1 mH。变流器负载使用三相阻感负载,电阻为50 Ω,电感为1 mH。
变流器中各器件的开关频率均为5 kHz;各级直流电容电压参考值为80 V;输入侧交流电采用调压器获取,相电压幅值为120 V;各直流母线电容采用2 个 2200 μF 的电容并联,容值为 4400 μF。
图7为输入侧变流器工作于不控整流时的电网电压ug和电流ig,此时Udc-1和Udc-2上分别跨接50 Ω的电阻负载。图7的电流为典型二极管整流器的电流波形,受输入侧电感Lg的影响,其相位滞后电网电压ug,且含有大量的谐波电流。
图8为采用PWM整流后的电网电压ug和电流ig波形。可以看出ug与ig同相位,表明采用PR调节器可以实现对50 Hz正弦信号的无静差跟踪,消除了无功功率,提高了线路的传输能力;由于采用多电平PWM,电网电流正弦度较高,减少了对电网的谐波污染。
图9为变流器输入侧的交流电压uH-1、uH-2以及二者电压之和uH-1+uH-2。可见,uH-1、uH-2均为三电平PWM波,二者幅值近似相同,表明此时两直流母线电容电压Udc-1、Udc-2近似相等,验证了变流器中电容电压均压特性良好;uH-1+uH-2为五电平PWM波,这是由于采用了第3节中给出的调制算法,将系统的开关频率提高为了原来的4倍,改善了输出电压的波形质量。

图7 电网电压与电流(二极管整流)Fig.7 Grid voltage and current(diode rectifier)

图8 电网电压与电流(PWM整流)Fig.8 Grid voltage and current(PWM rectifier)

图9 变流器输入侧交流电压Fig.9 Input-side AC voltage of converter
图10为uH-1+uH-2的谐波分析,其中最低次开关频率整数倍的谐波出现在20 kHz位置,这与式(11)的理论结果吻合,表明本文对PWM算法的建模正确,第3节中的调制算法流程有效、可行。

图10 输入侧交流电压的谐波分析Fig.10 FFT of input-side AC voltage
图11为变流器运行过程中,中频变压器绕组1的输入电压uM-1与电流iT-1。由uM-1的幅值可以看出,此时Udc-1稳定在90 V,与设定值相同。由uM-1与iT-1的相位关系可知,当输入电压为正时,输入电流为正;当输入电压为负时,输入电流为负。因此输入绕组1的功率为正。

图11 中频变压器绕组1的电压与电流Fig.11 uM-1and iT-1of middle-frequency transformer
图12为中频变压器绕组2的输入电压和电流波形,uM-2的幅值表明Udc-2维持在90 V附近,与系统的设定电压相同。当电压在正半周期内时,电流由负变正,总功率为正;当电压在负半周期内时,电流由正变负,总功率为正。因此绕组2的输入功率为正。图11和图12的实验结果表明,此时绕组1、2输入功率均为正,这与能量通过绕组1、2传递到负载的工作状况吻合。

图12 中频变压器绕组2的电压与电流Fig.12 uM-2and iT-2of middle-frequency transformer
图13给出了副边绕组的输入电压与电流,uM-0的峰峰值为180 V,表明Udc-0稳定运行于90 V,验证了本文提出的电容电压控制算法的正确性。图13中uM-0与iT-0保持反相,因此输入绕组0的功率为负,这表明能量通过绕组0供给负载,与实际能量流动方向相同。

图13 中频变压器副边绕组的电压与电流Fig.13 uM-0and iT-0of middle-frequency transformer
图14为此时变流器输出的三相电流波形,分别用ia、ib和ic表示,可以看出三相电流均为近似正弦,幅值相同,频率相同,相位互差120°,表明变流器输出的三相正弦电流正常。
为了实现能量双向流动,使变流器的输出端经电感后接三相反电动势运行,三相反电动势由三相电网经隔离变压器和调压器后降压得到。通过调整变流器输出电压的幅值和相位,即可改变功率的流动方向。
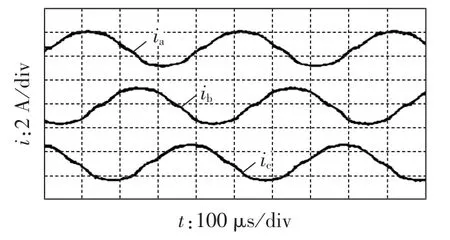
图14 三相负载电流Fig.14 Three-phase load currents
图15给出了能量双向流动时输入侧的电网电压和电流波形。观察图15中的电流波形可知,开始时电压、电流相位相反,表明功率由负载流向电网;从75 ms附近开始,经过50 ms左右的过渡过程,电流与电压相位变为相同,表明能量由电网流向负载,验证了本文提出的变换器具有四象限运行能力。

图15 能量双向流动时输入侧电压、电流波形Fig.15 Waveforms of input-side voltage and current for bi-directional power flow
图16是变换器负载突变情况下的动态实验波形,开始时能量由负载流向电网,因此图16中左侧30 ms内,电压、电流相位近似相反,之后能量由电网流向负载,电流与电压的相位迅速变为相同,输入侧保持了较高的功率因数。整个动态过程中,两直流电容电压近似保持不变,表明本文提出的变换器控制策略正确可行。

图16 直流母线电压动态波形Fig.16 Dynamic waveforms of DC-bus voltage
实验结果表明,本文提出的变流器拓扑结构工作正常,提出的调制算法可以实现变流器输入侧的电流与电压同相位,使系统运行于单位功率因数,降低输入电流的谐波含量;通过对各中频H桥进行控制,可以使各直流母线电容电压维持在设定值,实现能量的双向流动。变流器的输出侧采用三相逆变桥,可以驱动三相电机负载,实现对电机的高性能控制。
5 结论
本文提出了一种适合于机车牵引的四象限变流器拓扑结构,该变流器输入侧采用级联H桥结构,可以通过滤波电感直接与高压电网相连,从而省去了传统的工频降压变压器,降低了系统的体积、重量和成本。采用中频H桥和中频变压器,可以实现能量的双向流动,并显著节省材料。由于可以实现能量双向流动,因此可以四象限运行,将电机制动的能量反馈入电网,起到较好的节能作用。本文提出的变流器拓扑具有功率密度高的特点,因此适合于机车等对空间和重量等要求较高的场合。本文分析了变流器中能量的传递规律以及对电容电压的影响,提出了相应的电容电压控制算法和调制策略。实验结果表明该拓扑结构工作正常,所提出调制策略和控制算法正确可行,且具有计算量小、工作可靠的特点,应用前景较好。
猜你喜欢
现代食品科技(2022年8期)2022-09-02
中学生数理化·高一版(2022年3期)2022-04-05
初中生学习指导·提升版(2020年10期)2020-09-10
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
电测与仪表(2016年8期)2016-04-15
电测与仪表(2016年22期)2016-04-12
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年16期)2015-04-12
