
磁致伸缩位移传感器回波信号滤波器设计*
2013-10-22 07:24冯希辰周新志
传感器与微系统 2013年6期
冯希辰,周新志,余 超
(四川大学电子信息学院,四川成都 610065)
0 引言
随着现代通信技术、电子学以及计算机技术的高速发展,磁致伸缩材料的应用变得日益广泛,非接触式的测量消除了机械磨损的问题,保证了最佳的重复性和持久性[1],基于磁致伸缩材料研制的磁致伸缩位移传感器也得到了广泛的应用。磁致伸缩位移传感器与传统传感器相比,它具有测量精度高、使用寿命长、耐腐蚀、耐尘、耐压、耐高温、耐高振荡等一系列特点,已在行程测量和位移测量中得到了愈来愈多的应用。信号检测和滤波是磁致伸缩位移传感器实现高精度测量的关键因素[2]。滤波器作为现代电子电路设计中不可或缺的一部分,合理的滤波器设计不仅可以滤除信号中混入的杂波和噪声,提高信号的信噪比,而且也使信号的放大效果得到改善,使接收到的回波信号更加易于分辨和检测,可以大大提高传感器的灵敏度、精确度以及测量距离。
1 磁致伸缩位移传感器原理
磁致伸缩位移传感器是利用磁致伸缩特性材料的Wiedemann效应、Viuary效应及超声效应,将位置信息转换成最易测量的并且精度高的时间量,从而实现物体位置的高精度计量[3]。其总体结构图由图1所示。

图1 磁致伸缩位移传感器的总体结构Fig 1 Overall structure of magnetostrictive displacement sensor
磁致伸缩位移传感器主要由3部分组成:探测杆、电路单元和位置磁铁。电路单元负责产生激励电流脉冲,电流脉冲沿着磁致伸缩线向下传输,并产生一个环形的磁场。在探测杆外配有位置磁铁,当位置磁铁的磁场与激励脉冲的磁场交叠时会产生应变脉冲,脉冲以一定的速度在波导丝上传播,经信号处理电路后可得到起始脉冲和停止脉冲,两者之间的时间差即为激励脉冲在波导丝上的传播时间[4]。信号在特定材料的波导丝中是以固定速度向两端传输的,从而计算出位置磁铁的实际位置。
2 干扰与误差来源
在测量时,波导管内的电流脉冲和应变脉冲不可避免地对测量的输出信号产生一定的干扰,强度可以达到满量程的0.2%[5]。再加上信号传输过程中由于设备硬件条件、周围环境温度等因素所产生的噪声[6,7],以及由于剩磁现象的存在对信号所产生的影响,使得系统的信噪比降低,从而影响传感器的精度,缩短测量距离,甚至还会影响到系统的稳定性,所以,滤波器的合理设计显得尤为重要。在滤波器的设计上要具体根据电路中传输信号的特点,考虑滤波器与信号接收电路之间的匹配性和有效性,从而实现信号最有效的滤波和放大。
观察材料的磁滞现象是提高材料的磁特性的方法之一。经过对纯Ni波导丝材料磁滞现象的实验测量,其结果如图2所示。

图2 纯Ni波导丝的磁滞回线Fig 2 Hysteresis loop of pure Ni waveguide wire
当铁磁质达到磁饱和状态后,如果减小磁场H,介质的磁化强度M(或磁感应强度B)并不沿着起始磁化曲线减小,M(或B)的变化滞后于H的变化。在磁场中,铁磁体的磁感应强度与磁场强度的关系可用曲线来表示,当磁化磁场作周期的变化时,铁磁体中的磁感应强度与磁场强度的关系是一条闭合线,这条闭合线叫做磁滞回线[8],如图2所示。正是由于这种特性,传感器在测量时不可避免地会产生误差。
3 信号传输特点
由磁致伸缩位移传感器构成的信号系统主要包括脉冲激发、信号检测、信号滤波及放大、位移计算与输出、数据通信等部分。
电路单元所产生周期电流脉冲的幅度为24 V,脉宽为28 μs,频率为 1.22 kHz,其波形如图 3 所示。
不同的磁致伸缩材料的磁致伸缩性能、磁导率等参数都有差异[9]。本次传感器实验中所使用的是纯Ni的波导丝材料。

图3 发射脉冲Fig 3 Transmitting pulse
电路接收到的感应线圈的回波信号十分微弱,其幅度只有3 mV左右,并且不利于观察,所以,先采用运算放大器对其进行放大处理。图4为电路单元接收到经过OPA2354运算放大电路放大后的回波信号,此时信噪比为3.7 dB。

图4 回波信号Fig 4 Echo signal
4 滤波器的设计
4.1 低通滤波器的设计
根据磁致伸缩位移传感器激发出电流脉冲信号的频率来设计滤波单元电路,经过对回波信号频率测量分析,回波信号的中心频率为19 kHz。
NE5532是高性能低噪声双运算放大器集成电路,与很多标准运放相似,但它具有更好的噪声性能。使用NE5532设计制作的二阶巴特沃斯低通滤波器对回波信号的滤波效果如图5所示。

图5 二阶巴特沃斯低通滤波效果Fig 5 Effect of two order Butterworth low-pass filtering
可以看到,回波信号噪声在一定程度上得到了有效的抑制,信号更加清晰,并且易于辨认。但是,仍然有少许杂波存在,并且有些地方存在磁滞现象和剩磁现象,使波形并不平整,仍然存在优化和改善的余地。
波导丝是由磁性材料制成的,磁性材料在磁场中会被磁化,继而出现剩磁现象,即施于材料的磁场可引起材料极化强度改变或电场可引起材料磁化强度变化的现象。而磁致伸缩位移传感器的活动位置磁铁内部是一块永磁铁,只要是位置磁铁经过的地方,波导丝就可能被磁化,磁化处就存在一磁场,但是这个磁场和位置磁铁产生的磁场相比是很弱的。
实验中,将环绕波导丝的位置磁铁在波导丝上来回移动,并观察波形出现的变化。由图6所示,上面的回波信号为初始状态并且没有位置磁铁时的回波波形;下面则是位置磁铁滑过或者停留后的回波波形,可以看出:位置磁铁在波导丝上移动或者停留后的位置存在一些幅度原先为0幅值的地方在位置磁铁取下后幅值并没有降回0值,成为一些较小幅值的干扰信号。

图6 剩磁现象Fig 6 Remanent magnetism phenomenon
4.2 带通滤波器的设计
MAX275是美国MAXIM公司生产的通用型有源滤波器。它内含2个独立的二阶有源滤波电路,可分别同时进行低通和带通滤波,也可通过级联实现四阶有源滤波,中心频率/截止频率可达300 kHz[10]。运用MAX275可实现 Butterworth,Besssel和Chebyshev三种特性的滤波电路。总谐波失真(THD)优于典型的-86 dB,电源可以由+5 V单电源或±5 V双电源提供。
根据实验实际检测,电路单元所接收到的返回信号频率为19 kHz。
为获得阻带内的最大衰减,提高Q值,采用四阶滤波器设计,可通过将MAX275内部的2个二阶滤波器级联实现,即B部分地输入接A部分的输出。电路图如图7所示。

图7 应用MAX275设计的四阶带通滤波器Fig 7 Four order band pass filter designed by MAX275
各电阻参数计算[11]:
HBOP为复极点对中心频率X0处的增益,并有f0=X0/2P;Q为复极点对的品质因数,通常将它定义为带通滤波器增益最大时的频率fPK(不一定与f0相等)与在传输特性曲线上比最大增益低3 dB(或0.707倍)对应的上下2个频率fH与fL的比,即

显然,带通滤波器的中心频率f0值和放大倍数由外接电阻器R1,R2,R3,R4决定。当中心频率f0,Q值及增益确定后,即可获得R1,R2,R3,R4值。其中,RX,RY为滤波器内部的电阻,它们的值由引脚FC的接法决定,fC接V+,RX/RY=4,fC接 V - 时,RX/RY=0.04,fC接 GND 时,RX/RY=0.2,在保证品质因数Q值的精度的前提下,电路中采用的是fC接V+;HBOP适用于带通滤波时,频率为f0时引脚BOP处增益。
电阻的计算可以按照以下式子确定

根据计算和实验中实际调试,设计的带通滤波器各电阻值为R1=6.5 kΩ;R2=105 kΩ;R3=34 kΩ;R4=90 kΩ。
滤波结果如图8所示。
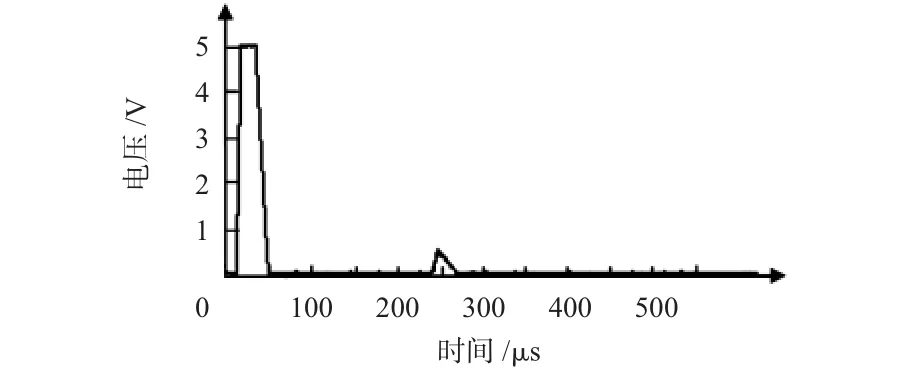
图8 MAX275滤波放大效果Fig 8 MAX275 filtering amplification effect
此时,信号的信噪比达到13.9 dB。可以看出:回波信号经过MAX275滤波放大后,使波形更加整洁,并且易于后期DSP采样处理,有效地抑制了周围环境因素和信号传输过程中产生的噪声信号,在一定程度上减少了剩磁现象对波形的干扰,相比于巴特沃斯二阶低通滤波器提高了系统的信噪比,从而也便于后期信号的采集和数字化处理。
5 结束语
通过对磁致伸缩位移传感器信号的检测和分析,根据信号的频率、噪声来源等特点合理地设计滤波器。实验中,使用了具有代表性的NE5532运算放大器设计制作了二阶低通巴特沃斯滤波器,有效地抑制了噪声信号,提高了信噪比,但是仍然存在较为明显的剩磁现象,并且滤波效果还有进一步提高的余地;选择MAX275通过级联实现四阶带通滤波器作为电路的滤波单元,实验结果表明:MAX275有效地抑制了回波信号中的噪声和干扰,在一定程度上有效减弱了剩磁现象对回波信号产生的干扰,通过与普通低通滤波器的滤波效果相比较,体现出了MAX275在磁致伸缩位移传感器回波信号滤波上的优势,实现了MAX275在纯Ni波导丝材料的磁致伸缩位移传感器电路信号滤波上的高效、低噪、减弱剩磁现象干扰等优点。
[1] 王智强,彭勇刚,韦 巍.磁致伸缩位移传感器在精密注塑机上的应用[J].传感器与微系统,2010,29(9):138 -144.
[2] 柴婷婷,柴晓杰.基于DSP的磁致伸缩液位传感器[J].仪表技术与传感器,2008(7):3-5.
[3] Li Yibo,Sun Liying,Jin Shijiu,et al.Development of magnetostriction sensor for on-line liquid level and density measurement[C]∥Proceedings of the 6th World Congress on Intelligent Control and Automation,2006:5162 -5166.
[4] Eerenstein W,Mathur N D,Scott J F.Multiferroic and magnetoelectric materials[J].Nature,2006,442:759 -765.
[5] 李维嘉,熊 军.磁致伸缩传感器测量信号滤波方法探讨[J].传感器世界,2001(9):29-30.
[6] Baronti F,Fantechi G,Roncella R.A new and accurate system for measuring cruising yacht freeboards with magnetostrictive sensors[J].IEEE Transactions on Instrumentation and Measurement,2011,60(5):1811 -1819.
[7] Moreno J,Munoz D.A non-invasive thermal drift compensation technique applied to a spin-valve magnetoresistive current sensor[J].Sensors,2011,11:2447 -2458.
[8] 余 超,周新志,熊胤琪.Fe83 Ga17磁致伸缩位移传感器激励信号的ANSYS分析及DSP实现[J].仪表技术与传感器,2012(8):4-6.
[9] Chen Lei,Li Ping,Wen Yumei,et al.The magnetostrictive material effects on magnetic field sensitivity for magnetoelectric sensor[J].Journal of Applied Physics,2012,111:1 -3.
[10]罗 珊,孙 峥,蒋新胜.模拟有源滤波器MAX275的原理及应用[J].国外电子元器件,2005(1):73-74.
[11]王彦文,刘 清.基于MAX275的有源带通滤波器的设计与应用[J].武汉理工大学学报,2005,29(1):72 -75.
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2016年11期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
振动、测试与诊断(2014年5期)2014-03-01
为了孩子(孕0~3岁)(2009年4期)2009-03-30
祝您健康(1987年3期)1987-12-30
