
基于磁阻传感器的旋转弹转速测量系统设计
2013-10-22 07:24苏树清李锦明李锡广
传感器与微系统 2013年6期
苏树清,李锦明,李锡广
(中北大学电子测试技术国防科技重点实验室,山西太原 030051)
0 引言
旋转弹是一种重要的陆军火力压制手段,其旋转体制能有效减小由于气动外形的不对称、质量偏心等引起的落点误差[1,2]。旋转弹依靠旋转来保持飞行过程中的稳定,也依靠旋转来保持它射向的高精度。因此,旋转弹飞行过程中转速的获取对其性能分析就显得尤为重要。地球和近地空间存在的磁场,称为地磁场。地磁场是一个具有方向性的弱磁场。地球磁场比较稳定,弹体在飞行过程中始终处于地磁场中,可利用地磁传感器采集弹丸在地磁场的信号。由于弹丸在飞行的过程中,不宜进行实时分析,所以,将采回的数据先进行保存,等弹丸击中立靶后,取出电路板,将保存的数据调出分析、处理,就可以计算出旋转弹飞行过程中的转速。基于此,本文提出一种主要由HMC1043三轴磁阻传感器、PIC24FV32KA301单片机和串行闪存AT25FS040构成的旋转弹转速测量系统。
1 系统硬件设计
系统主要由三轴磁阻传感器、信号调理电路、A/D转换、FLASH存储器、微控制器和上位机组成。系统总体设计框图如图1所示。
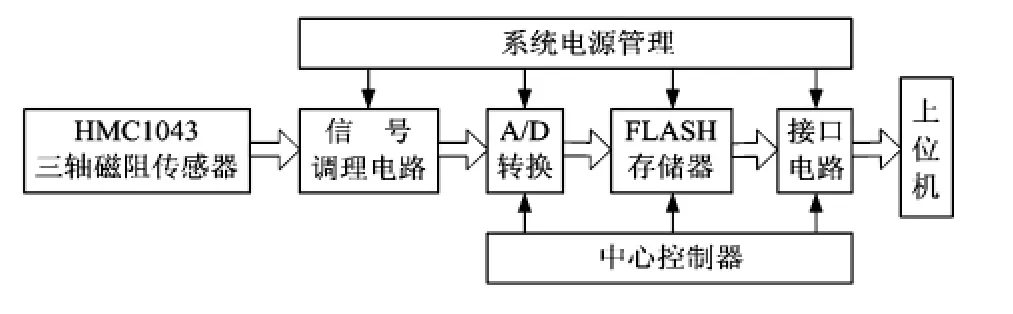
图1 系统总体设计框图Fig 1 Block diagram of overall design of system
三轴磁阻传感器把传感轴方向的入射磁场强度转换为差动电压输出,这些电压信号经信号调理电路处理后传输到单片机的模拟输入端,通过单片机内置的A/D转换器进行模数转换,转换后的数字量传输到FLASH存储器中进行存储,方便系统随时从FLASH中调取数据进行分析、处理。
1.1 HMC1043磁阻传感器及其置位/复位电路
霍尼韦尔HMC1043型传感器是一种小型三轴表面安装的传感器序列系统,适用于低磁场磁性传感,采用霍尼韦尔各向异性磁阻(AMR)技术。这种传感器是极灵敏的低磁场、固态磁传感器,可用来测量地球磁场的方向和从数十μGs到6 Gs的强度等级。
HMC1043传感器内部有3个惠斯通电桥,如图2所示。当置于变化的外加磁场中时,由镍铁合金制成的电桥电阻阻值将会发生变化,从而在电桥的测量端输出一个差分的电压值。通过测量这个差分电压就能得出磁场在该电桥电阻方向上的相对值的变化[3]。
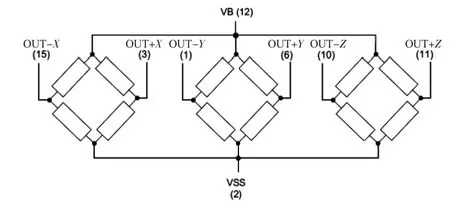
图2 HMC1043传感器内部惠斯通电桥示意图Fig 2 Schematic diagram of internal Wheatstone bridge of HMC1043 sensor
当磁阻传感器暴露于超过10×10-4T的干扰磁场中时,传感器内部磁畴的极化方向被打乱,传感器的输出特性随之改变,灵敏度降低。为了消除这种影响并使输出信号达到最佳,利用置位和复位脉冲电流,使内部磁畴的极化方向统一,以抵消干扰磁场。
本系统设计的置位/复位电路如图3所示。由单片机提供一个SET/RESET(置位/复位)控制脉冲,通过开关管IRF7509作用,经一电容连接到磁阻传感器的SR+端。
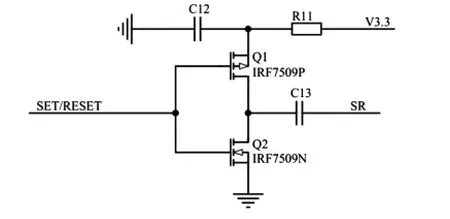
图3 置位/复位电路Fig 3 Set/reset circuit
1.2 电源模块设计
由于PIC24FV32KA301单片机需要+3.3 V的供电电压,因此,通过LDO稳压芯片将电压由+5 V降至+3.3 V,其电路原理图如图4所示。LDO稳压芯片选用TI公司的TPS73733,其输出电压为+3.3 V,输出电压精度可以达到±0.5%,电源抑制比(PSSR)更是高达58 dB,满足使用要求。
1.3 信号调理电路设计
1.3.1 放大电路设计

图4 3.3 V电源电路原理图Fig 4 Principle diagram of 3.3 V power circuit
由于HMC1043磁阻传感器输出的电压信号比较微弱,须先进行放大。由于传感器选取放大器需要考虑的因素有:开环增益、带宽、精度、功耗、温漂范围、噪声容限等。比较几种仪表放大器的参数,选用了TI公司的高精度的仪表放大器INA128。它具有以下特点:1)使用简单:只需要一个电阻就可以方便地调节放大倍数,放大范围大;2)差动放大:可以消除背景噪声,适合精度要求较高的场合[4]。
放大器原理图如图5所示,将传感器的输出OUT+,OUT-分别与运放的VIN-,VIN+相连。放大倍数G由引脚1和8之间的电阻RG决定
放大后的输出为

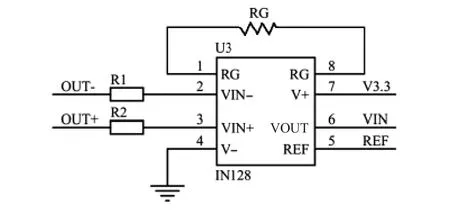
图5 放大电路原理图Fig 5 Principle diagram of amplifier circuit
IN128的参考电压基准直接影响着后续电路的精度,因此文中设计了其参考电压电路。如图6所示,选用微功耗、高精度的LDO基准电压源ADR127为IN128提供+2.5 V参考电压。

图6 参考电压电路Fig 6 Reference voltage circuit
1.3.2 滤波电路设计

图7 低通滤波电路原理图Fig 7 Principle diagram of low-pass filtering circuit
1.4 数据存储电路设计
传感器采回的数据须先进行保存,方便做后续数据处理。本设计中选用ATMEL公司的AT25FS040作为存储器。AT25FS040是4Mbits的串行闪存,具有先进的写保护机制,支持速度高达50MHz的SPI总线的存取操作。数据保存长达20 a,每个扇区可擦写/编程100000次。
PIC24FV32KA301与AT25FS040的硬件接口如图8所示。其中,PIC单片机的SPI专用引脚SCK,SDI,SDO分别与闪存对应的引脚相连,存储器的片选CS可与MCU的任意I/O脚相连,作为存储器的片选信号。AT25FS040的HOLD直接接高电平,即不允许在CS有效的情况下暂停SPI通信。
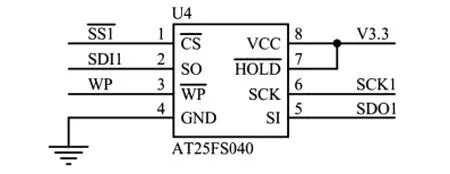
图8 AT25FS040硬件接口图Fig 8 Schematic diagram of hardware AT25FS040 interface
2 系统软件设计
系统的软件设计主要是完成的功能是在一定时间内以固定的采样周期进行数据的采集。具体流程如图9所示。
在开始采集数据之前须先进行开始计数操作,然后才能以系统设定的采样周期进行数据的采集,直到接收到停止采集信号为止,记录下此时计数寄存器中计数数值,即可知道采集时间。
3 测试结果与分析
3.1 置位/复位电路测试
由单片机发出一置位/复位脉冲,在传感器电阻带上测出置位/复位信号如图10所示,可以看出:脉冲能达到600 mA以上,满足要求。
3.2 系统性能测试
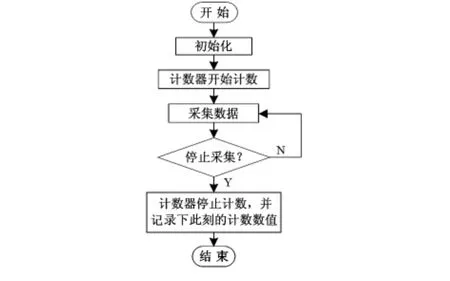
图9 数据采集程序流程图Fig 9 Flow chart of data acquisition program
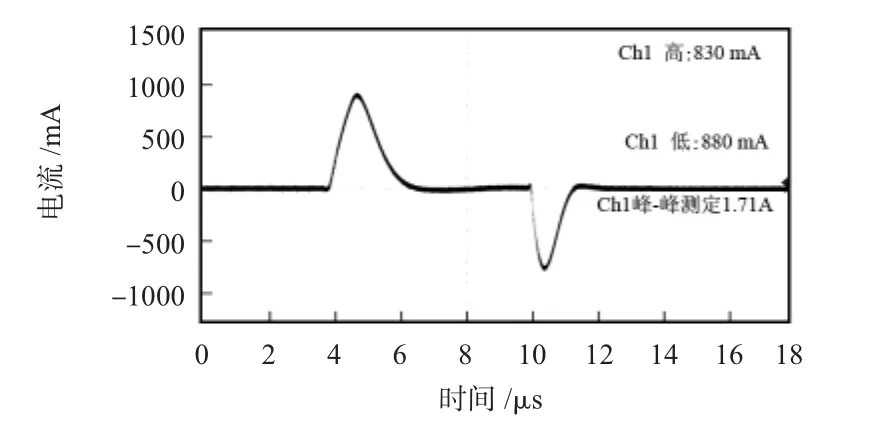
图10 置位/复位信号图Fig 10 Set/reset signal diagram
实验设备采用三维无磁性转台,三维无磁性转台主体结构由木质和铝质材料制作而成,可以有效避免扰乱转台周围地磁场分布,为磁阻传感器采集地磁信号提供了一个较稳定的周边磁场环境[5]。可通过调节转台旋钮来调节变频电机的电源输入频率以设定滚转轴的转速,模拟弹体的高速旋转运动。本实验所采用的三维无磁性转台最高转速为20 r/s。
由HMC1043磁阻传感器的工作原理可知,传感器输出的差分电压的波形是呈周期性变化的正弦波,正弦波的周期就是弹丸旋转一周的时间,计算出一定时间内正弦波峰或波谷值点的个数就可以计算出旋转弹飞行过程中的转速。测试数据见表1。
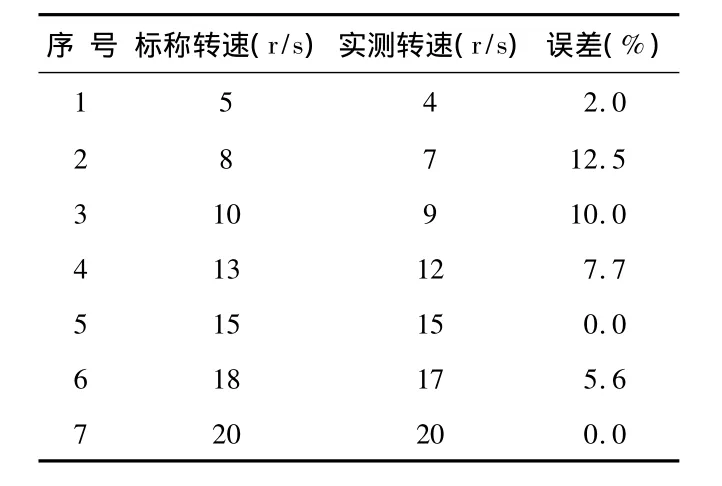
表1 不同转速测试记录Tab 1 Test records of different rotating speed
由表1可知,实测转速与实际转速有偏差,并且在一定范围内,误差大致随着转速的提高而减小。这是因为不能保证采集到的所有数据在每个采样周期内都完整,计数开始和结束时间附近所采集到的数据可能只是一周期数据的一部分,并且采集到的数据可能还未到峰值点,这样系统就会忽略这些数据,从而影响精度。实验表明,本文中提出的旋转弹转速测量系统可以用于测量旋转弹的转速。
4 结束语
该系统以PIC24FV32KA301单片机为控制核心,采用HMC1043三轴磁阻传感器进行地磁信号的采集,利用单片机内置的A/D转换器对数据进行转换,之后送入串行闪存进行保存,系统可随时从串行闪存中调取数据传输到上位机进行显示、分析和处理。测试结果表明:所设计的转速测量系统,能比较准确地获得弹丸转速,达到了预期的效果。
[1] 苏 中,付国栋.滚转弹的姿态解算研究[J].北京信息科技大学学报,2009,24(2):9 -13.
[2] 李兴城,牛宏宇.基于磁阻传感器的旋转弹姿态测量算法研究[J].计算机仿真,2012,29(5):51 -54.
[3] 朱荣华,林新华,孔德义,等.三维磁阻式电子罗盘的研制[J].传感器与微系统,2010,29(12):102 -104.
[4] 刘晓娜.地磁传感器及其在姿态角中的应用[D].太原:中北大学,2008.
[5] 杨 青.高速旋转弹转速/速度参数测试技术研究[D].太原:中北大学,2010.
猜你喜欢
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
防爆电机(2021年4期)2021-07-28
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
中学生数理化·高二版(2016年12期)2017-02-28
电子制作(2016年11期)2016-11-07
Coco薇(2016年1期)2016-01-11
电机与控制应用(2015年2期)2015-03-01
