
模糊自整定PID控制在石英炉温度控制系统中的仿真
2013-10-22 06:13张红娟
唐山学院学报 2013年6期
张红娟
(唐山学院 装备制造系,河北 唐山063000)
石英炉是融化水晶粉制造石英玻璃的主要设备。由于石英玻璃生产工艺复杂,原料熔制需1 800~2 000℃高温,因此应有一个性能较高的温度控制系统来对石英炉温度进行控制,以保证温度的稳定性。设计温度控制系统首先要建立石英炉的温度模型,以此为基础选择PID调节器,实现炉温闭环自动控制的目的。
1 石英炉温度模型及常规PID参数的确定
石英炉温温度系统是带有延迟环节的二阶传递函数[1]:

对上述模型的PID参数进行调整,当开环受控对象阶跃响应没有超调,其响应曲线有如图1的S形状时,可采用齐格勒-尼柯尔斯法设定PID参数,在单位阶跃响应曲线斜率最大的拐点处作切线,得参数L和T,则比例-积分-微分控制器3个参数分别为:


本模型的开环阶跃响应曲线如图2所示。根据此曲线,应用齐格勒-尼柯尔斯法确定L≈3,T≈50,由此计算得Kp=20,Ki=3.3,Kd=30。此时的常规PID可较好跟踪给定信号,但输出波形有细纹波动,说明所控温度还不够平稳。而我们希望被控对象的输出能较好地跟踪给定值,因此将模糊控制与PID结合,采用模糊自整定PID控制方法进行温度控制,来减小细纹波动。
2 模糊自整定PID控制

模糊自整定PID控制原则是:找出PID 3个参数与e和ec之间的模糊关系(e为输出与给定值之差,ec为e的变化率)。在模糊自整定PID控制系统运行中,通过不断检测e和ec,并以PID参数的修正量(ΔKp,ΔKi,ΔKd)为输出,以满足不同时刻偏差和偏差变化对PID参数整定的要求,从而使被控对象具有良好的动态和静态特性。最终得到PID控制器的三个参数,Kp=Kp′+ΔKp,Ki=Ki′+ΔKi,Kd=Kd′+ΔKd(其中Kp′,Ki′,Kd′为初始设计值)。从系统的稳定性、响应速度、超调量和稳定精度等方面来考虑,Kp,Ki,Kd的作用如下:(1)若Kp值小,将延长调节时间。(2)Ki越大,系统的静态误差消除越快,但过大会引起较大超调;若过小则系统静态误差难以消除,影响系统的调节精度。(3)Kd可改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报;但此值过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。模糊自整定PID控制算法原理如图3所示。

在常规PID参数条件下,采用模糊自整定PID算法对模型进行控制,Kp,Ki,Kd模糊规则分别如表1,表2,表3所示。

表1 Kp模糊规则

表2 Ki模糊规则

表3 Kd模糊规则表
3 Matlab仿真
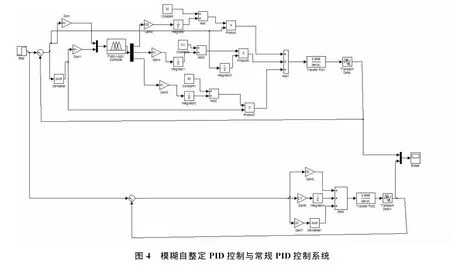
在Matlab命令窗口中输入fuzzy命令,打开模糊推理工具箱的图形界面,输入端为e,ec,输出端为Kp,Ki,Kd,其中模糊控制器变量论域取[-6,6]。同时按照需要,将输入语言变量e和ec分为7个模糊子集,分别用语言值正大(PB)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NB)来表示,各语言变量取值的隶属度函数为trimf(三角形隶属函数),对于模糊控制规则按照表1,表2,表3选取[2]。在Simulink环境下,建立模糊自整定PID控制模型,如图4上半部分所示,这是在常规PID参数已确立的情况下进行的模糊修正PID,fuzzy logic controller为模糊控制器,里面按上述3个表设置了模糊规则。图4下半部分为常规PID控制系统,为比较控制效果,所以把两个模型放在一个图中。
运行程序,仿真结果如图5所示。从图5可以看出模糊自整定PID跟踪控制的曲线平稳,超调量小,细纹小;而常规PID控制超调量大,细纹大。模糊自整定PID控制对于石英炉温度的控制效果好于常规PID控制,可更好地跟踪给定信号。
4 结语
常规PID控制可较好地跟踪石英炉的温度调节给定信号,但输出波形有细纹波动。而模糊自整定PID控制与常规PID相比,减少了输出波形的细纹波动,对石英炉的温度控制具有较好的动态和稳态性能,而且超调量较小,调节速度快,稳态误差小,控制效果好。

[1]方崇智.过程辨识[M].北京:清华大学出版社,1988:199-200.
[2]张德丰.MATLAB/Simulink建模与仿真实例精讲[M].北京:机械工业出版社,2011:340-342.
猜你喜欢
科学导报(2020年50期)2020-09-09
中学生天地(A版)(2019年8期)2019-08-27
电子制作(2018年14期)2018-08-21
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
初中生之友·中旬刊(2017年4期)2017-05-10
艺术评论(2016年4期)2016-06-12
中国继续医学教育(2015年1期)2016-01-06
铁道科学与工程学报(2015年5期)2015-12-24
探测与控制学报(2012年1期)2012-08-27
