
基于模糊神经网络PID算法的电阻炉温控系统
2013-10-20 08:36:20董爱华李梦瑶
微型电脑应用 2013年12期
董爱华,李梦瑶
0 引言
电阻炉不仅在工业生产中非常广泛的应用于冶金、机械、建材等行业[1][2],而且在科研、教学中也有应用,它的温度控制的优劣直接影响产品的品质[3]。
现阶段,对电阻炉采用的主要控制方法是PID控制[4],还有一些采用模糊控制和神经网络控制。PID控制的控制参数一旦确定,便无法改变,对电阻炉这种时变的控制对象控制效果不是很好。当采用模糊算法时,模糊系统学习能力较差,模糊规则的建立和隶属度函数的生成和调整较困难,模糊控制消除静态误差的能力较差,难以达到较高的控制精度[5]。当采用神经网络控制时,不能利用现有的知识,无法引入人工经验,不能依据已有的控制经验来解决控制问题。
本文把三个控制算法融合起来,形成模糊神经网络PID算法,兼有三种控制算法的优点,经仿真表明,该算法对电阻炉温度的控制动静态性能较好。
1 电阻炉模型
电阻炉温控系统的简图如图1所示:

图1 电阻炉温控系统简图
通过改变一个周期内晶闸管的通断时间,改变电阻炉的电压,从而改变电阻炉的功率,使实际温度跟随设定温度的变化而改变。
2 电阻炉模型
理论分析和实验结果证明,电阻炉在阶跃输入影响下,具有非振荡特性和自平衡能力,可用比例环节、一阶惯性环节和一个延迟坏节来近似。其传递函数可以近似地表示成:

其中K—静态增益,τ—纯滞后时间,T—惯性时间常数。
3 模糊神经网络PID控制器的设计
当|e(k)|> ε,(ε的大小决定着控制精度,ε越小,控制精度越高,程序越复杂;反之,ε越大,控制精度越低,程序越简单)说明误差较大,控制器按最大或最小输出,具体到电阻炉温度控制,即温度误差较大, 控制器以最大或最小输出,电阻炉全功率或功率为零,也就是控制电阻炉电压为最大或零。当|e(k)|<ε,系统采用模糊神经网络PID控制。在实际应用中,根据不同控制精度的要求,多次调试,选择合适的ε。
本文提出的模糊神经网络PID控制器的结构,如图2所示:

图2 模糊神经网络PID控制器的结构图
模糊神经网络PID主要有两个部分组成(1)传统的PID控制器。这是控制器的核心,PID控制器对被控对象直接进行闭环控制,模糊神经网络主要作用是实时调节PID控制器的参数,从而达到最好的控制效果。它的最大特点是控制参数Kp、Ki、Kd是实时改变的。(2)模糊神经网络FNN,根据系统的实时运行状态,即根据误差和误差变化率来调节PID控制器的参数,使控制指标达到最优[6]。
本文中的PID控制并不是简单的比例、微分和积分的“线性组合”关系[7],若想取得较好的控制效果,必须使比例、积分和微分3种控制作用达到最佳的组合。模糊神经网络的主要任务就是利用模糊神经网络理论建立误差e(k)、误差变化率ec(k)和PID控制器的3个参数Kp、Ki、Kd的关系。
如公式(2)

e(t)—t时刻的采样误差;y(t)—被控对象t时刻的实际输出:r(t)—t时刻的设定输出:t—采样时间。
3.1 PID控制原理
控制器采用的最多的是PID控制,PID控制是一种线性控制方法,原理框图如图3所示。其位置式控制规律,如图3所示:
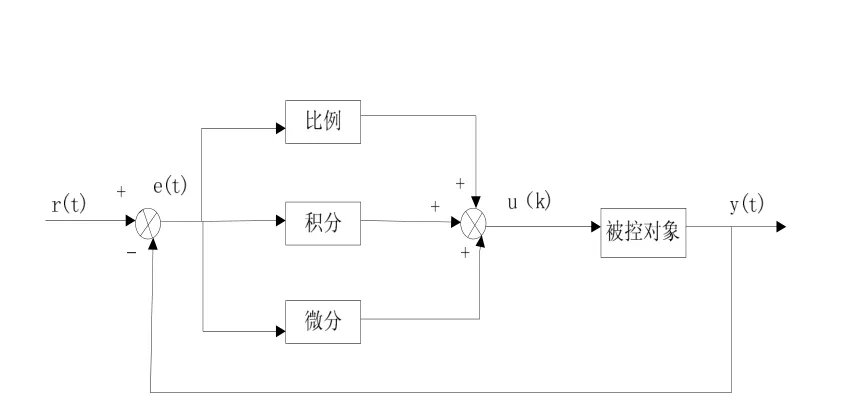
图3 PID控制系统原理框图
如公式(3)

其中u(k)—第k次采样时刻控制器输出的控制量;Kp—比例系数;Ti—积分时间常数;Td—微分时间常数;T采样周期;Ki=Kp/Ti为积分系数,Kd=KpTd为微分系数,e(k)和e(k-1)分别是第k和k-1次采样时刻输入误差值。
3.2 模糊神经网络的结构和设计
模糊神经网络(FNN)将神经网络的学习能力引入到模糊系统中,将模糊系统的模糊化处理、模糊推理通过神经网络来表示[8],一般分为四层:1 输入层;2 模糊化层;3 模糊推理层;4 输出层。它的结构图,如图4所示:
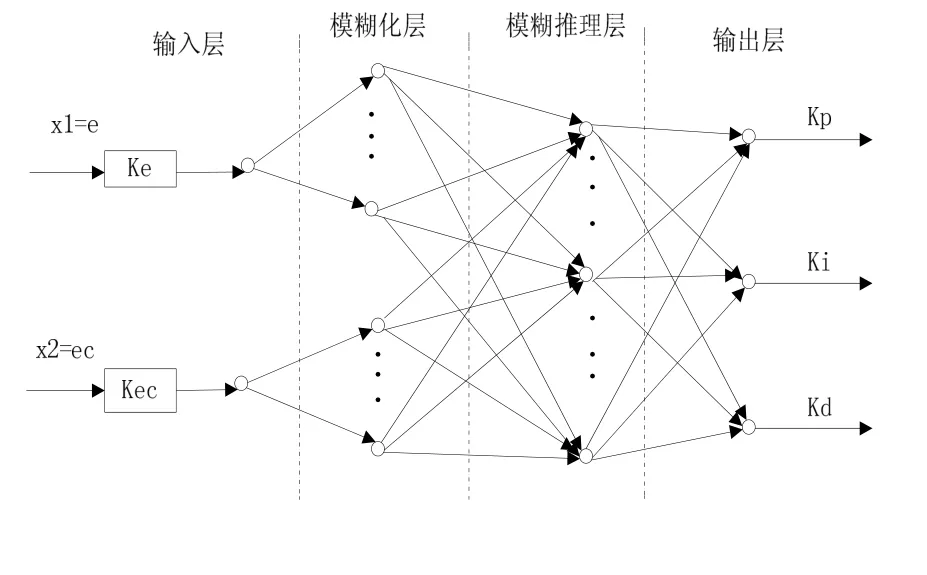
图4 模糊神经网络结构图
输入层与模糊化层、模糊化层与模糊推理层之间的连接权值均为l,只有模糊推理层与输出层之间的权值需要调整。
本文中的模糊神经网络是2-6-9-3结构,两个输入神经元,3个输出神经元分别对应PID控制器的3个参数Kp、Ki、Kd。
模糊神经网络各层的输入输出关系如下:
第1层(输入层):作用将输入量导入网络,如公式(4)
第2层(模糊化层):将输入变量模糊化,计算输出各输入变量属于各语言变量的隶属度函数。本层有6个节点,分别对应误差和误差变化率的语言变量:B(大),M(中),S(小)。语言变量的个数的选择和系统的复杂程度和控制精度的要求有关。控制精度要求高,系统复杂,选择的语言变量个数就要多,如公式(5)
模糊化层采用高斯型函数作为隶属函数,cij和bij分别是隶属函数的中心值和宽度。
第3层(模糊推理层):
由输入变量个数N=2,每个变量的模糊子集数为M=7,根据y=MN,可得此层的节点数m=9[9]。

第4层(输出层):

ωij是模糊推理层与输出层之间的权值。三个输出神经元的输出为PID控制器的三个参数Kp、Ki、Kd。

3.3 模糊神经网络的学习算法
系统的目标函数:
tk第k个神经元的期望输出, pk第k个神经元的实际输出。
模糊神经网络的高斯函数的中心cij和宽度cij,及模糊推理层与输出层之间的权值ωij采用BP的梯度下降法。

η为学习速率,α为惯性系数。
4 仿真结果与分析

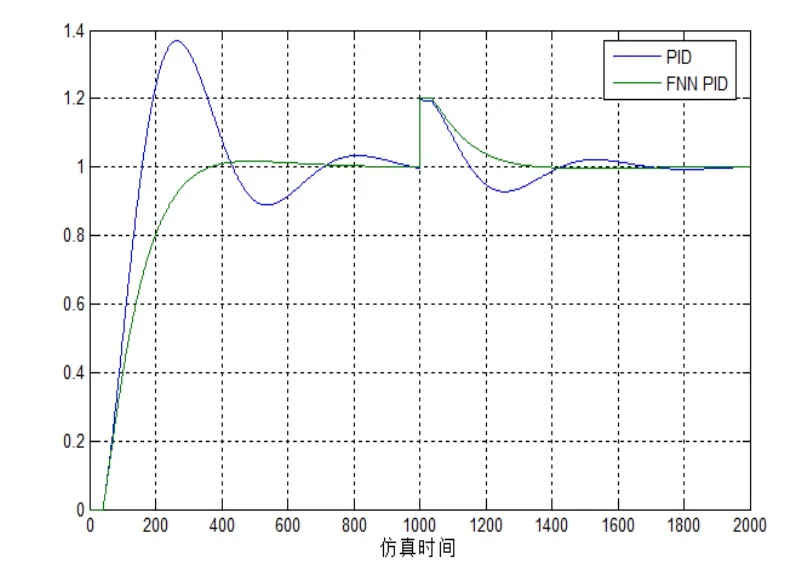
图5 仿真曲线图
从仿真曲线可知,模糊神经网络PID(FNN PID)和PID比较:模糊神经网络PID上升速度快,超调量基本为零,在加入外部扰动时,能快速的调节到稳定。
[1]邢伟.电阻炉智能模糊控制系统的研制[D].杭州: 浙江理工大学,2008.
[2]谢铮辉,马有良,邓琥等.基于PID的电阻炉炉温控制系统[J].化工自动化及仪表,2011,38(8):931-933
[3]孙凯,李元科.电阻炉温度控制系统[J].传感器技术,2003,22(2):50-52.
[4]马雪峰,田跃辉,李玲莉.一种改进PID控制算法在电阻炉温度控制系统中的应用[J].船海工程,2009,38(2):68-70.
[5]李英顺 ,伦淑娴.模糊PID温度测控仪[J].仪表技术与传感器,2003,(1):20-22
[6]张妤.基于知识的模糊神经网络PID控制器的研究[D].哈尔滨:哈尔滨理工大学,2006.
[7]王彦,邓勇,王超.基于改进粒子群算法的模糊神经网络PID控制器设计[J].控制工程,2012,19(5):761-764.
[8]刘敏,马军爽.模糊RBF 神经网络在锅炉水位控制中的应用[J].微计算机信息, 2006 ,22 ,(9-1 ):56-58.
[9]刘莉,张彦敏.基于改进遗传算法的FNN PID控制器在温度控制系统中的应用[J].工业控制计算机,2009,22(3):63-65.
猜你喜欢
工业加热(2023年11期)2024-01-05 02:13:32
工业加热(2023年3期)2023-05-06 07:29:08
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
质量安全与检验检测(2022年1期)2022-03-13 08:07:34
现代装饰(2020年7期)2020-07-27 01:27:50
上海计量测试(2020年2期)2020-05-12 12:02:04
运筹与管理(2019年10期)2019-12-17 06:07:12
宇航计测技术(2018年3期)2018-09-08 02:21:36
物联网技术(2017年7期)2017-07-20 14:09:05
纺织导报(2014年9期)2014-10-31 00:07:58
