基于光电成像的目标转动姿态非接触测量方法
2013-10-20 06:59袁红卫闵志方
舰船科学技术 2013年1期
袁红卫,闵志方
(华中光电技术研究所,武汉光电国家实验室,湖北武汉430073)
0 引言
随着光电测量成像传感器性能的提升 (包括传感器的成像分辨率、成像质量和成像帧频等)以及数字图像软件处理算法和硬件处理性能的增强,光电测量已经广泛应用于国防和民用各领域,特别是通过光电成像方式来对目标自身的姿态进行非接触式测量[1-2]。如在航天航空领域中,可通过多基站光电经纬仪对空中目标的三维运动姿态进行非接触式测量;在电力行业,可通过可见光/红外传感器对高压输电线路的异常状态 (如覆冰)进行非接触式测量;在铁路行业,可通过脉冲激光测距仪在可见光电视跟踪的状态下对受电弓供电线路的架设位置进行非接触式测量等[3-4]。光电成像测量之所以越来越受到各行各业的青睐,是因为它们都具有非接触式测量的安全性和便捷性,以及测量精度高、可靠性好等优点[5-6]。
本文主要介绍了一种利用光电成像对非平移目标的二维转动姿态的非接触式测量方法。该测量过程利用高速可见光相机和高速图像处理方法,能够实时输出高帧频姿态测量数据。
1 待测物体描述
以某项目为例,被测物体为圆锥形刚体,待测物体能够在x,y两个轴上进行转动,如图1所示。
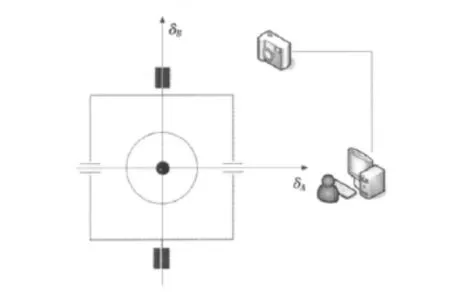
图1 转动非接触式测量系统示意图Fig.1 Diagram of the non-contact measurement system for target rotation
但由于2个转轴被固定住,不能进行任何方向上的平移运动,需要对转角δA和δB进行非接触式测量。转角δA和δB的测量范围均为0~±22°;转角测量误差和系统零位转角误差均需低于0.05°;系统采样频率高于500 Hz,且测量信号时间延迟<2 ms。
另外,要求非接触式测量设备能对被测物体转动进行实时测量和解算;能对转动数据实时显示、输出和记录;能对整个测量过程的高速视频进行记录,并对记录视频进行回放观察和验证。
2 基于光电成像的非接触式测量
设备系统构成如图2所示。该测量装置采用高速摄像机作为被测物体转动测量的传感器。当高速摄像机获取感兴趣区域 (靶标)的图像信息后,高速图像采集单元将图像采集下来,并通过高速视频记录单元记录在高速硬盘,以便于回放观察和后期处理。
另一方面,高速相机通过高速视频数据传输接口与高速图像处理单元连接,该处理单元能够对图像进行实时的滤波处理和高速目标跟踪提取功能,通过实时图像数据处理同步得到2个自由度方向上物体沿2个相机光轴垂直平面的转动数据,利用该数据即可以计算出物体绕转轴的真实转动数据并通过通用PCI总线发往计算机主机。计算机主机上运行的显示和控制软件能够对高速视频进行低帧频显示,将接收到的转动数据进行实时显示和记录,并通过光纤网络接口向外发送,该软件还能够对高速相机的参数、高速视频采集单元和高速视频记录单元的参数进行控制。

图2 设备系统构成Fig.2 Block diagram of the equipment systems constitution
该测量装置主要由成像传感器和电子机柜2部分组成。成像传感器部分包含高速相机、光学自准直设备以及相应的相机姿态调整平台;电子机柜部分包括机柜、计算机主机、显示屏和高速图像记录系统。
成像传感器部分的高速相机通过高速数据传输线与电子机柜部分的计算机主机内的图像处理板以及高速图像记录系统相连;图像处理板则通过PCI数据总线与计算机主机相连。外部仿真机与电子机柜部分通过光纤连接。
测量过程:首先将待测物体的转轴安装水平,即保持2个转轴确定的平面与水平面保持平行,高速摄像机也水平安装于物体正下方,并通过相机位置的平移调节,保证相机的光轴指向转轴交点,如图3所示。

图3 测量系统原理示意图Fig.3 Schematic diagram of the measurement system
设二维摆轴的交点为空间坐标系原点(0,0,0),高速摄像机的成像光心坐标点为(r,s,t),成像平面距离光心为 d,旋转前靶标的坐标为(u0,v0,w0),旋转后的坐标为(u1,v1,w1),旋转前靶标成像坐标为(x0,y0)(相对于光心位置),旋转后的成像坐标为(x1,y1)(相对于光心位置)。可以得到方程组如下:
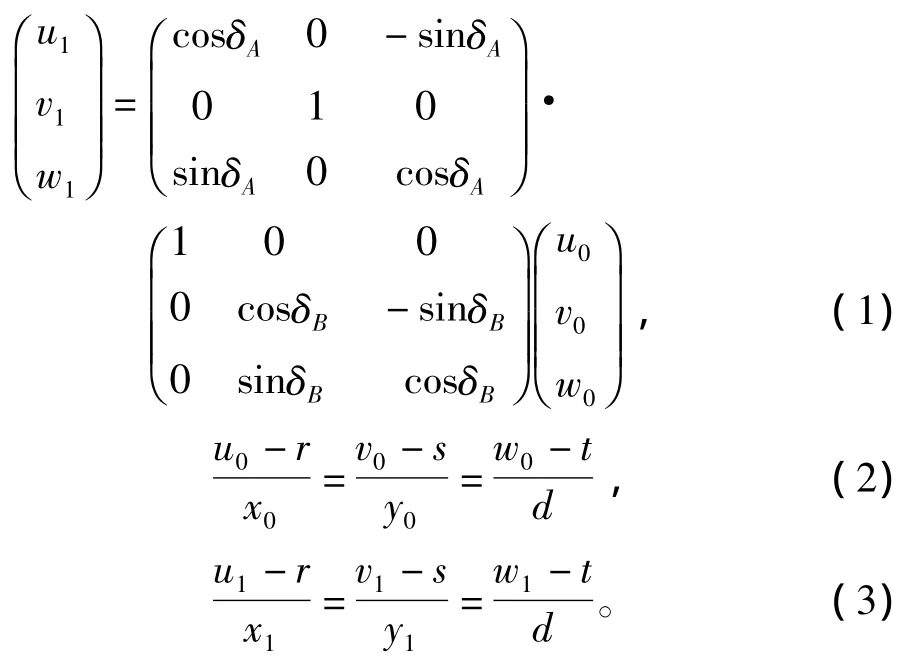
式(1)~式(3)共有2个旋转角,光心坐标、成像平面、光心距离及旋转前后靶标坐标共有12个未知数,但却只有7个方程,因此是不定方程组,无法唯一解出旋转角。
若靶标有k个,上述方程组有k个,那么旋转方程个数则有3k个,靶标空间比例方程则有4k个;而未知数有2个位置旋转角,1组光心坐标,成像平面与光心距离以及6k个旋转前后靶标坐标。为了保证方程个数与未知量相同,则有3k+4k=2+3+1+6k;所以至少需要k=6组靶标点的成像结果才能解出方程组。由于方程组并不是线性方程,显然这样的计算量太大,对于高速计算来说无法保证实时性。
因此,为了能够只用1组成像靶标就解出旋转角,需要通过调整相机位置使得r=s=t=0,且事先确定成像平面与光心距离d。此时则有方程组

此时共有2个旋转角和6个靶标坐标参数共8个未知量,但是却只有3+4共7个方程,仍然无法解出未知数。由于旋转前后靶标到原点的距离是可以事先确定的,因此可以增加方程

为了得到成像平面与光心距离d,可以通过以下的成像方法计算得到:
设成像的物距为p,镜头焦距为f,由于成像靶面到成像物体之间的距离可以测出,设为g,则有
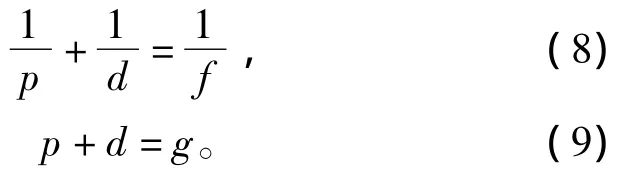
由上述方程组即可解得d。由于2个转轴在z轴方向上并非重合,即2个转轴之间存在一定的距离,可以通过前期测量得到,设为ε,可得到如下方程组

由于任何待测物体都不是绝对刚性,因此安装的靶标在测量过程中会因为转轴的转动形成一定的运动形变。为了测量零位误差,需要在锥体底面圆形中心安装1个靶标,由于实际情况无法做到,因此需要4个靶标,依据靶标质心连线的交点来确定锥体定点垂线的偏移位置。
若需要解算出任意给定坐标系下的转角 (如绕Z轴向旋转θ=45°的坐标系下的旋转δφ和δψ),可以先对原始坐标系进行旋转,绕Z轴逆时针旋转θ度即得到所需解算的角度δφ和δψ所在的坐标系。因此,新坐标系下的摆动向量坐标为:

3 测量方法工作流程
首先将待测物体降至零位,即让2个转轴都归于零位。对锥体底面贴上高对比度反光圆形靶标,为了增大目标对比度,可以在靶标周围设计为黑色的背景,必要时可用照明装置对靶标进行照射。靶标的中心连线方向尽可能与转轴的轴线平行,分别在锥体底端左右两端。
然后将成像传感器置于待测物体底部约1 m距离。将转轴方向与成像传感器的视轴调为平行。在2个成像传感器的位置和姿态调整完毕后,可开始所需要的姿态测量。姿态测量时,首先打开成像传感器和电子机柜,待高速处理和记录设备正常工作后再控制物体的姿态变化。高速图像处理单元将实时提取靶标位置并由此解算转动角度。设备工作流程如图4所示。
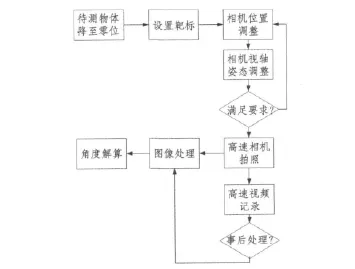
图4 设备工作流程图Fig.4 Devices working flowchart
计算单元对图像数据的高速实时处理。图像各帧数据依照采集的顺序被存放在计算机指定的堆内存中,可以考虑开辟2块堆内存用于存放图像数据,第n帧的图像数据将直接覆盖第n-2帧的图像数据。计算机指令直接计算靶标的质心位置,为了能够减少计算量,假定已知前一帧的靶标质心位置,则当前帧的质心只需要考虑以前一帧为中心的一定范围区域内的质心计算问题,整个计算过程的算法复杂度是线性的。因此可以保证图像处理过程的实时性。
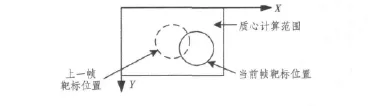
图5 快速质心提取原理Fig.5 Schematic diagram of the fast centroid extraction algorithm
质心求取公式如下
X方向:

Y方向:

其中:M为质心计算矩阵的行宽;N为质心计算矩阵的列宽;u(i,j)为相应像素的灰度值;x(i,j)和y(i,j)分别为相应像素的列号和行号。
4 测量系统硬件处理单元
高速图像处理电路板的主要功能是接收高清视频接口的高帧频CMOS输入的视频信号,进行高速视频A/D变换。精确地提取目标的几何中心;完成数据解算,通过通用PCI接口实时输出角度信息,显示视频信号到监视器和 DVI显示器。Full CameraLink输出接口直接与高速采集和记录系统连接。图像采集与处理视频数据的最高分辨率为1280×1024,由于DSP采用的是TI公司的高端720 MHz定点DSP,保证了由足够的速度完成每帧目标的提取任务。
系统设计上采用模块化设计的思想:FPGA完成图像采集、外部存储器的读写逻辑控制,DSP读写RAM的总线切换和实时图像的去隔行滤波等功能。DSP实现包括模板匹配、模式识别等多种图像算法。由于图像采集卡的复杂性和大量数据的运算及逻辑控制,因此采用高速DSP作为数字信号处理的核心。以TI的TMS320C6414作为数字信号处理器,FPGA采用ALTERA的EP2S60F672,以国半公司的DS90CR288作为Camera Link接口芯片,通过32位数据总线与DSP进行视频数据传输。
5 测量方法仿真实验
该项目中采用的高速摄像机的分辨率为1280×1024;像元大小为14 μm×14 μm,仿真实验转轴距离光心的距离为1.5 m,靶标距离转轴的距离为0.48 m,镜头焦距为22 mm;转轴零位时,靶标的成像位置距离中心在X和Y方向上均偏移了10个像素。在这种情况下,给出转轴旋转时靶标不同成像位置所求出的转轴角度值 (见图6~图7)。
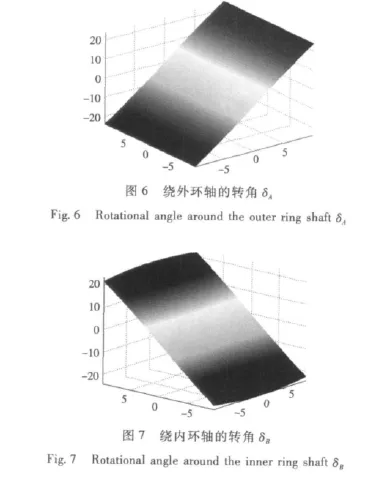

表1 靶标成像质心在不同坐标下解算出的转角值(X和Y方向分别从598~600)Tab.1 Rotation angle values calculated by the target centroid in different coordinate(X,Y directions,respectively,from 598~600)
在图6~图7和表1中,转角δA和δB相邻元素差绝对值的极大值为0.0363°。这就是说,若图像处理单元获取的靶标质心位置的精度能够控制在1个像元大小范围之内,则光电成像转角测量精度就能够控制在0.036°,满足测量误差需低于0.05°的要求。当然,该分析是在假设成像设备安装准确的前提下得到的。
6 结语
本方案采用非接触式测量方式对待测物体转动姿态进行测量。在测量时,测量元件对于物体自身的自由运动没有任何影响和约束,且测量过程简单易操作,测量精度高,可靠性好。该测量方案中的测量原理可以广泛应用于国防和工业转动设备高精度检测领域,不仅能够用来验证物体的矢量转动的控制准确性,同时能够通过所记录的高帧频图像对运动细节进行进一步观察和分析。
[1]房超.机器视觉及其在工业检测中的应用[J].自动化博览,2007,25(4):6-48.FANG Chao.Machine vision and its applications in industrial inspection[J].Automation Expo,2007,25(4):6-48.
[2]席斌,钱峰.机器视觉测量系统在工业在线检测中的应用[J].工业控制计算机,2005,18(11):75-76.XI Bing,QIAN Feng.Machine vision measuring system online testing in the industrial[J].Industrial control computer,2005,18(11):75-76.
[3]邱茂林,马颂德,李毅.计算机视觉中摄像机标定综述[J].自动化学报,2000,26(1):43-55.QIU Mao-lin,MA Song-de,LI Yi,Overview of camera calibration in computer vision[J].Journal of Automation,2000,26(1):43-55.
[4]熊有伦.精密测量的数学方法[M].北京:中国计量出版社,1989.XIONG You-lun.Mathematical methods of precision measurement[M],Beijing:Chinese Metrology Publishing,1989.
[5]CHIANG J H,A combination of rough-based feature selection and RBF neuralnetwork forclassification using gene expression data[J].IEEE Transactions on Nanobioscience,2008,7(1):91-99.
[6]PENG D,YI Z.Convergence analysis of a deterministic discrete time system of feng'S MCA learning algorithm[J].IEEE Transactions on Signal Processing,2006,54(9):3626-3632.
猜你喜欢
今日农业(2022年4期)2022-11-16
微特电机(2022年9期)2022-10-15
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
军民两用技术与产品(2021年10期)2021-03-16
湖南工业大学学报(2020年6期)2020-11-27
世界农药(2019年3期)2019-09-10
汽车实用技术(2017年20期)2017-10-24
电脑爱好者(2016年23期)2017-01-05
航天器工程(2014年5期)2014-03-11