基于智能视频监控的老人跌倒识别算法研究
2013-10-16 12:15:24陈立潮潘理虎谢斌红张英俊
太原科技大学学报 2013年4期
万 航,陈立潮,潘理虎,谢斌红,张英俊
(太原科技大学计算机学院,太原 030024)
当今社会已进入老龄化社会,加上现在老年人人口数量众多并且独居老人也很多,老年人跌倒发生率高、后果严重,已经成为一个严重的医疗问题和社会问题。通过科学有效的手段来预测及检测老年人跌倒,从而减小老年人跌倒带来的伤害问题已成为国内外新的研究热点,具有较高的研究价值及应用意义。第一时间能够发现老年人跌倒并且救护能够减小跌倒事故对老年人伤害。利用跌倒行为的一些特征,与日常的一些普通行为进行区分。然而国内外目前对老年人跌倒行为过程的研究尚无针对性的模型,对于不同跌倒过程与相似运动状态识别的误判问题比较突出,尤其是对跌倒冲击状态前的预测问题研究尚起步不久,还有许多关键问题尚未解决。
目前对于跌倒检测有两个方向,一个是利用传感器的检测方法,另一个是基于视频图像的检测方法。当前利用传感器的检测算法有任子良,李勇提出基于二次判断的无线多传感器跌倒监测系统[1],李冬等提出了基于三维加速度传感器的跌倒检测系统[2],石欣等提出了基于压力传感器的跌倒检测系统研究[3]。当前视频图像的检测算法有杨帆等提出的基于头部运动轨迹以及3D视觉的检测系统以及WANN-YUN SHEIH等提出的边缘替换识别算法[4]。由于传感器技术的不断改进传感器正变得越来越小、重量轻、携带方便。因此,这些检测跌倒行为的传感器不受限制。然而使用这些传感器最大的问题是噪音的干预。正常的活动如坐着,站着或者躺下会产生非常类似于跌倒事故的模稜两可的信号。此外,如果一位长者失去意识,我们不能分辨是否有跌倒事故或只是躺下。由于在跌倒过程中人体的重心变化很明显,所以提出基于重心变化识别方法,该方法将从视频中的图像进行以下几步处理,包括目标提取、图像处理、跌倒模式识别。
1 目标提取
使用三帧帧间差分法从一段视频图像中提取一个人轮廓,三帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,而采用三帧帧间差分法能够更好的提取出目标轮廓。为了后续的图像处理,将得到的差分图像进行二值化处理。因此我们设定了一个阈值,并将在此像素值以上的是白色的, 所有其他像素为黑如图1。

图1 三帧差法Fig.1 Three difference methods

图2 膨胀腐蚀处理Fig.2 Erosion and dilation

图3 边缘检测Fig.3 Edge detection
2 图像处理
2.1 去噪
边缘检测之前需要一个更高阶降噪处理,在边界附近滤出一些“盐和胡椒粉噪声”。一种有效处理这样的噪声的方法就是使用中值滤波,中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,中值滤波的基本原理是把数字图像或数字序列中一点的值改用该点的一个邻域中各点值的中值代替,让周围的像素值接近的真实值,从而消除孤立的噪声点。方法是去某种结构的二维滑动模板,将板内像素按照像素值的大小进行排序,生成单调上升(或下降)的为二维数据序列。二维中值滤波输出为 g(x,y)=med{f(x-k,y-l),(k,l∈W)},其中,f(x,y),g(x,y)分别为原始图像和处理后图像。使用中值滤波能保持清晰边缘用以防止提取轮廓形状不明显,例如脚或手在提取后模糊不清。
2.2 膨胀腐蚀
图像有许多小洞在物体的周围,我们需要一个填补功能来填这些小洞。一个典型的关闭功能包括两个形态学操作,被称为膨胀腐蚀,可扩大和收缩物体大小,为了平滑对象的外部。物体的膨胀会导致规模的扩大,因为它会在一个3×3视窗大小内每个像素值与最大值像素进行交换。另一方面,侵蚀执行同样的方式,除了它将会引起物体减少,因为每个像素值是在一个3×3视窗大小内每个像素值与最大值像素进行交换。从理论上讲,一个洞或者一个坑道可以经过一系列的膨胀侵蚀操作后会被处理完整。
令f(x,y)代表输入图像,B(x,y)代表结构元素,Df和DB分别是函数f和B的定义域。灰度腐蚀的定义为:

灰度膨胀的定义为:

灰度开运算是用结构元素B对灰度图像先进行腐蚀操作然后进行膨胀操作,即:

灰度闭运算是用结构元素B对灰度图像先进行膨胀操作然后进行腐蚀操作,即:

对图1做一次腐蚀,紧随其后的是做一次膨胀,图像就获得一个外部轮廓对象如图2.
2.3 边缘检测
从外部轮廓图像进行边缘检测。Canny算子的目标是找到一个最优的边缘检测,最优边缘检测的含义包括尽可能多地标识出图像中的实际边缘,漏检真实边缘的概率和误检非边缘的概率都尽可能小;检测到的边缘点的位置距离实际边缘点的位置最近,或者是由于噪声影响引起检测出的边缘偏离物体的真实边缘的程度最小;算子检测的边缘点与实际边缘点应该是一一对应。因此Canny使用了变分法和四个指数函数项表示,经过Canny边缘检测算法处理后如图3.
2.4 重心计算
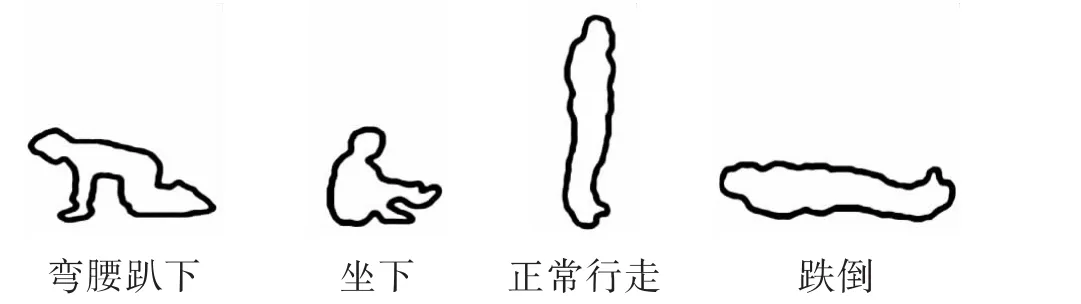
图4 各种姿态轮廓图Fig.4 The outline of various acts
在提取出视频中的人物的外部轮廓后,利用外部轮廓的每个像素点的坐标值就可以计算该外部的重心。
求重心:
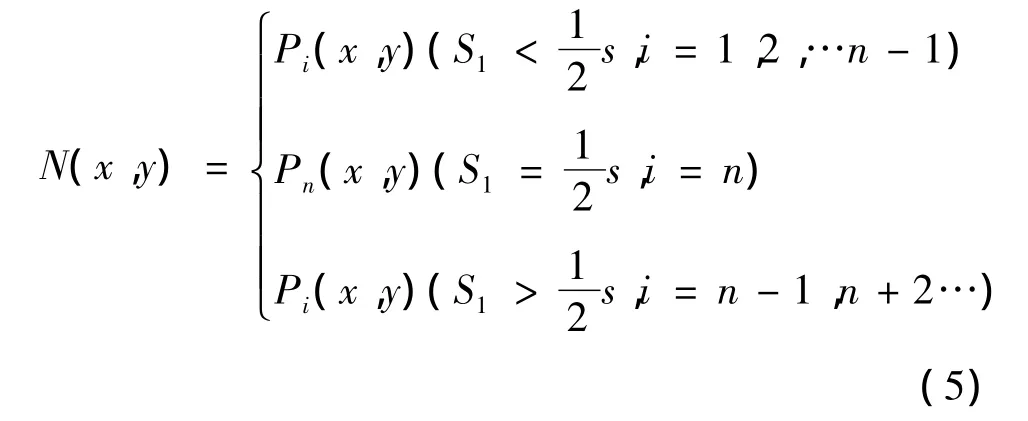
(1)设定轮廓线为 L,设在 L上的点为Pi(x,y),由于轮廓内部的的灰度值一样,可以看作等密度的,在L上取一点P0(x,y),然后沿着L取另外一点Pi(x,y),两点连线与轮廓所围成的面积为S1(根据所包围的像素点的个数),S为整个轮廓的面积(整个轮廓所包围的的像素个数)根据上述式子求得n,这样就可以得到线段P0Pn,可以求得线段所在直线L1表达式。
(2)再取一点(异与X0和Xn),同样方法再求线段P'0P'n所在直线L2表达式
重心的变化会有几种情况:
(1)弯腰趴下或坐下如图4中1和2情况。
(2)正常的通过图4中3情况。
(3)跌倒如图4中4情况。
提取连续几帧图像的轮廓后得到重心值,根据重心变化位移,以及时间公式(6)就可以得到加速度的值。

a为加速度,在t1时间内的重心变化值为s1,在t2时间内的重心变化值为s2.
3 实验结果
本文跌倒识别算法将人体在不同情况下的重心位置作为检测特征,通过读取大量图片将人在弯腰,坐下,行走以及躺下时的重心作为统计样本,通过统计重心坐标样本,人在正常行走的时候重心最高,这种属于正常情况也最好判断,人在弯腰以及坐下时重心与跌倒时重心有重叠的部分,容易产生识别错误,人在跌倒时重心特别低,能够准确判断。根据采样统计结果如表1:
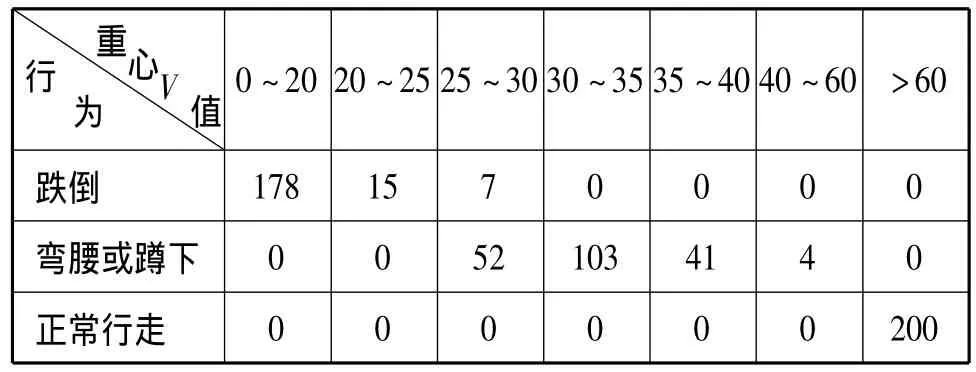
表1 采样统计结果Tab.1 The statistical results of sampling
通过以上的统计分析,将识别的重心值M设定为 M=18,25,28,30 来识别判断不判断。
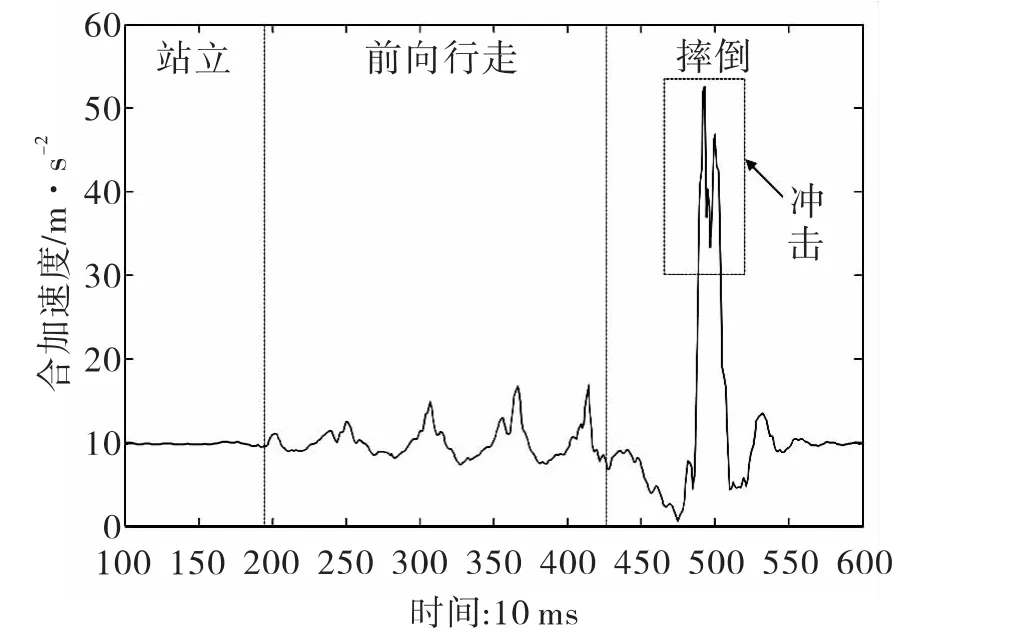
图5 行走过程中加速度变化Fig.5 The acceleration change of walking
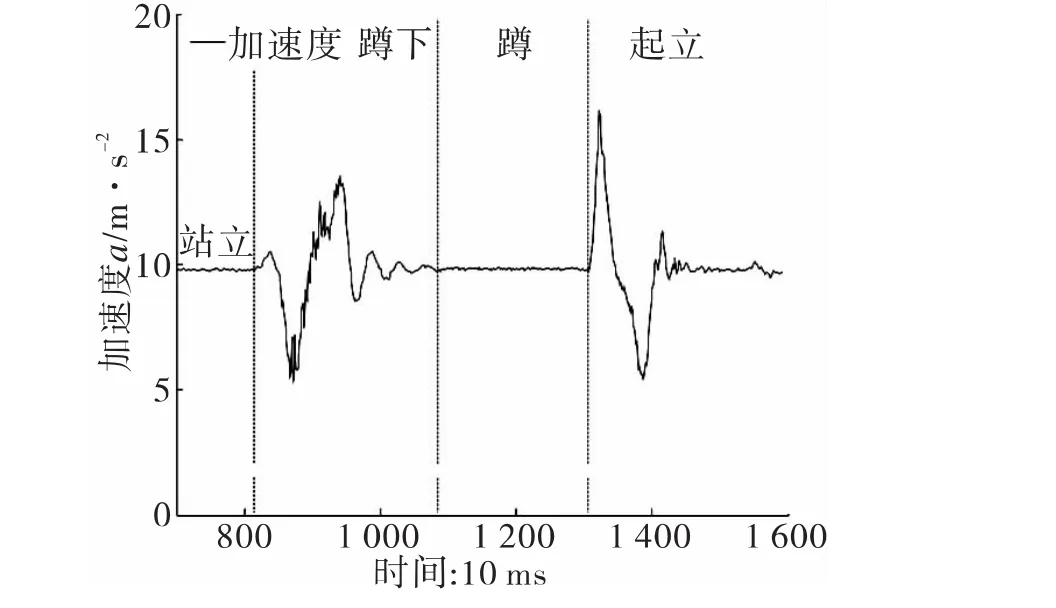
图6 蹲下过程中加速度变化Fig.6 The acceleration change of squatting
为了实现对识别效果的评估定义了以下的式子:
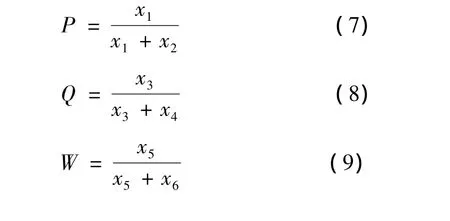
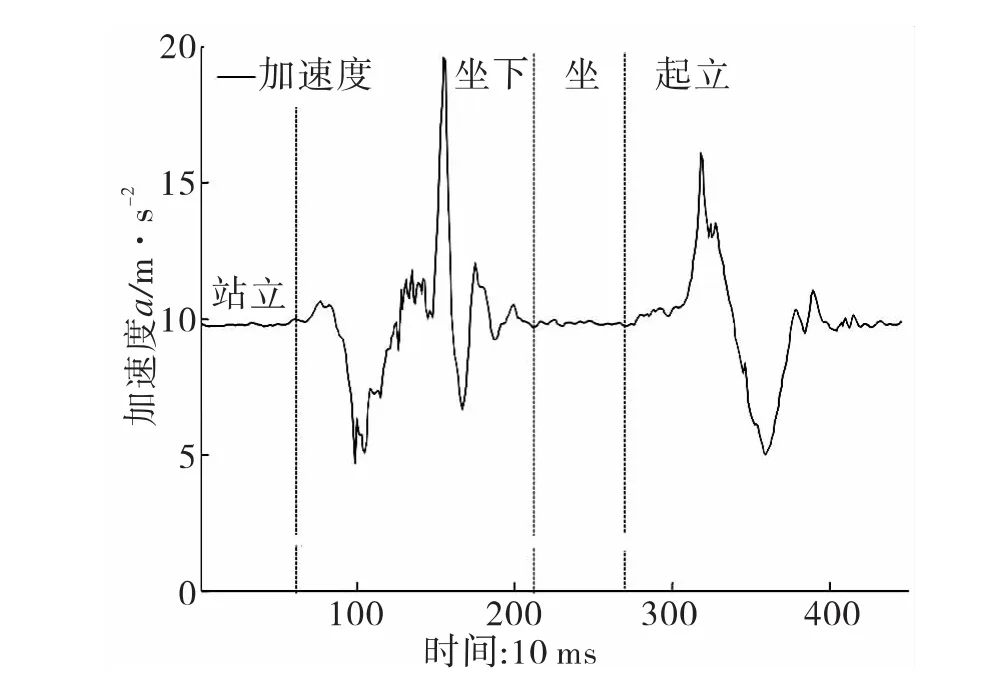
图7 坐下过程中加速度变化Fig.7 The acceleration change of sitting
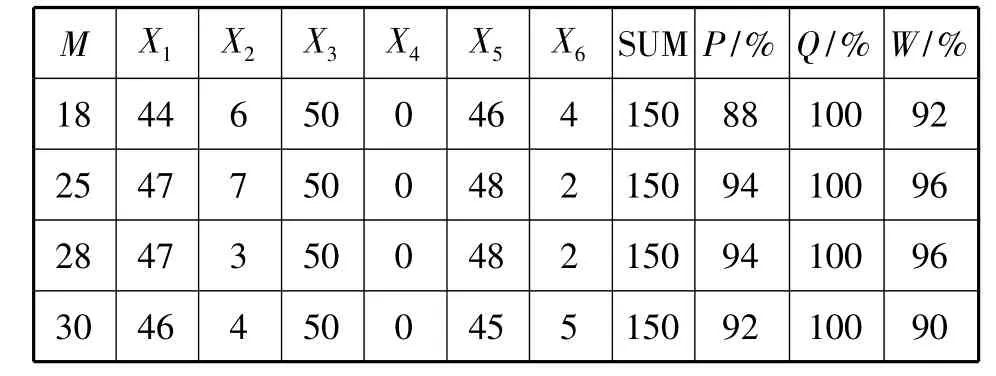
表2 跌到检测实验结果Tab.2 The detect experimental results of fall
x1代表弯腰或者蹲下是检测为正常的次数,x2代表弯腰或者蹲下是检测为跌倒的次数,x3代表正常行走检测为正常的次数,x4代表正常情行走检测为跌倒的情况,x5代表是跌倒时检测的次数,x6代表跌倒发生是未被检测出来的次数,M为设定的跌倒时重心值。
由于带有传感器的跌倒检测系统具有噪声干扰,基于压力传感器的跌到识别系统其识别率在85% 左右,所以视频图像的检测结果有大幅度提高。
通过以上的数据可以看到,当人正常行走时检验识别率为100%,这就说明在正常行走通过视频监控该算法能够完全识别是不会出现误判,而其它情况会出现误判。但当M变化时候就会出现识别的变化,这是由于蹲下和弯腰时重心与跌倒时有重叠部分,所以在识别时候会出现误差,当M设置过小时将会出现跌倒时未被检测出来,会当成其他的行为,当设置过大时会将部分正常行为识别为跌倒,就会出现误判。对于这一分类细化还有进一步提高的空间。
4 结论
本文基于三帧法和重心相结合,提出一种对老年人跌倒判断的新方法,利用三帧差法提取视频中的目标图像轮廓,然后重心,利用重心的位置,加速度变化来判断老年人的行为,通过对临界状态数据进行判断该算法总的误判率降至更低。同时,也进一步提高了跌倒识别的抗干扰能力。实验结果表明该算法对老年人跌倒的识别率较高,对其他生活时间的误判率也相对较低。因此该算法有较高的鲁棒性和准确性适合在老年人跌倒识别中加以应用。
[1]任子良,李勇.基于二次判断的无线多传感器跌倒监测系统[J].计算机工程与设计,2012,33(5):1785-1789.
[2]李冬,梁山.基于加速度传感器的老年人跌倒检测装置设计[J].传感器与微系统,2008,27(9):85-88.
[3]石欣,熊庆宇,雷璐宁.基于压力传感器的跌倒检测系统研究[J].仪器仪表学报,2010,31(2):66-70.
[4]SHIEH WANN-YUN,HUANG JU-CHIN.Falling-incident detection and throughput enhancement in a multi-camera video-surveillance system [J].ACM Transactions on Intelligent Systems and Technology,2011,2(3):27-33.
[5]BERTOZZIM,BROGGI A,DEL ROSE M,et al.A pedestrian and Detector using histograms of oriented Gradients and a support vector machine classifier[C]//Proc of the IEEE Intelligent Transportation Systems Conference,2007:143-148.
[6]KIM S E,HAN J K,KIM J G.An efficient scheme for motion estimation using multi reference frame sin H.264/AVC[J].IEEE Trans on Multimedia,2006,8(3):457-466.
[7]孙新香.基于三轴加速度传感器的跌倒检测技术研究与应用[D].上海:上海交通大学,2009.
[8]宗文杰,余青松,张敏,等.基于GIS的视频监控系统研究[J].计算机工程与设计,2011,32(2):745-748.
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
制造技术与机床(2019年11期)2019-12-04 05:50:54
自动化学报(2017年5期)2017-05-14 06:20:56
通信产业报(2016年44期)2017-03-13 08:41:45
光学精密工程(2016年1期)2016-11-07 09:01:59
计算机工程(2015年4期)2015-07-05 08:27:39
舒适广告(2008年9期)2008-09-22 10:02:48
雕塑(1999年2期)1999-06-28 05:01:42