
HEV再生制动控制策略的研究与优化
2013-10-14 06:55阎树田徐明辉孙会伟王剑
机械制造与自动化 2013年2期
阎树田,徐明辉,孙会伟,王剑
(兰州理工大学a.数字制造技术与应用省部共建教育部重点实验室,b.机电工程学院,甘肃兰州 730050)
0 引言
制动能量回收系统作为混合动力汽车(hybrid electric vehicle简称HEV)的一个子系统,能够将汽车制动过程中的部分动能和位能变换为电能,并存储在能量储存装置中,在汽车启动和加速时加以利用。通过再生制动回收制动能量,对HEV提高能量利用率及增加续驶里程具有非常重要的意义,然而在很多情况下,单独的再生制动不能满足汽车的制动要求,因此,还必须保留传统的机械摩擦制动,所以HEV制动系统通常是由再生制动和传统机械制动组成的复合制动。为了实现汽车的稳定制动,前、后轮上的制动力须进行合理的分配,这样就需要解决两个问题:1)如何分配再生制动力与机械摩擦制动力,从而尽可能多地回收汽车的制动能量;2)如何在前、后轮上分配制动力,从而实现汽车的稳定制动[1]。
从某种意义上讲,增加再生制动与提高制动稳定性是相互矛盾的,文中在满足制动稳定性的基础上,以最大限度回收制动能量为目标,提出了一种优化的动态协同控制策略,在能够满足制动要求的前提下优先利用再生制动回收制动能量,动态协调分配前后轮的制动力用于跟随驾驶员的减速意图,并分析电动机本身转矩特性和电池充电条件的约束问题,建立其数学模型,同时针对某一HEV车型在汽车仿真软件advisor上进行仿真分析。通过协调再生制动力与机械摩擦制动力的分配,在保持汽车制动稳定性的基础上,最大限度地提高制动能量的回收率。
1 再生制动系统的数学模型
1.1 汽车制动动力学分析
HEV制动力矩一部分来自于电动机产生的电磁转矩,经传动装置转化为车轮的制动力,称为再生制动力;另一部分是传统液压制动器制动时产生的力矩;同时车辆行驶时,由于受空气阻力、滚动阻力以及爬坡时受到的坡度阻力,这些共同组成了HEV整车制动力。其方程如下:

其中:Ff—滚动阻力;
Fw—空气阻力;
Fi—坡度阻力;
Fbf—前轮制动器制动力;
Fbr—后轮制动器制动力;
Freg—电动机再生制动力。
根据汽车动力学理论可知作用于车轮上的制动力合力 Fz为[3]:

其中:Fz—整车制动力;
M—汽车质量;
δ—汽车质量换算系数;
v—车速。
在城市路况下,Fw和 Fi可以忽略[4],制动系统中主要是对非自然力产生的阻力进行研究,为此制动系统产生的制动力。其表达式如下:

再生制动车辆在不计滚动阻力矩时,制动过程可表示为:

因此,对再生制动控制策略的研究,是在保证前后轮总的制动力满足制动要求的前提下,合理的处理前、后轮制动力矩,以及再生制动和摩擦制动力矩的关系,从而实现高效、安全的制动能量回馈。
分析车辆的制动性能时,通常采用利用附着系数。利用附着系数是制动强度的函数,随制动强度的变化而变化,且利用附着系数越接近制动强度,地面的附着条件发挥得越充分,汽车轴间制动力分配越合理,车辆将获得更好的制动效能和稳定性。联合国欧洲经济委员会制定的ECE制动法规对双轴汽车前后轮制动器上的制动力提出了明确的规定,要求车辆在各种装载条件下,前轴利用附着系数曲线应在后轴利用附着系统曲线的上方。对于z=0.1~0.61之间的各种车辆,规定制动强度:
式中:φ—路面附着系数;
z—制动强度。
1.2 电动机转矩特性
电动机系统理想的机械输出特性为:低于基速恒转矩,高于基速恒功率[5]。其机械输出特性为:

式中:Treg—电动机再生制动转矩;
Pn—电动机额定功率;
ωn—电动机额定转速;
ω—电动机转速。
1.3 电池充电功率和电流
电池的内阻模型

式中:Pb—电池充电功率,受电池最大充电功率限制;
Eb—电池的电动势,是电池SOC的函数;
I—充电电流;
Rb—电池内阻。
由式(8)得电池充电电流为:

HEV再生制动时,为了保护电池,则把电池充电功率和电流作为确定再生制动力的约束条件,确保电动机的实际制动功率和电流不超过电池的限制充电功率和电流,避免损坏电池。
1.4 电动机再生制动力
电动机再生制动功率关系:

考虑低速下再生制动没有意义,修正电动机的制动转矩为:

式中:w(n)为电动机转速的影响因子
ω1,ω2据电动机选定的特定转速,根据电动机的输出转矩,可得到驱动轮产生的最大再生制动力:

其中:ig—变速器传动比;
io—主减速器传动比;
r—车轮半径;
ηT—传动系效率。
2 再生制动控制策略
在传统制动力分配控制策略的基础上,提出制动力动态协同控制策略,在保证制动安全性的前提下,尽可能多的回收制动能量。改进策略采用理想前后轮制动力分配关系,对制动力进行一次分配,然后根据车速确定当前的最大再生制动力,对再生制动和液压制动进行二次分配。再生制动协同控制策略如图1。
2.1 协同控制算法
具体的制动力分配算法如下:
1)根据制动踏板开度α计算需求制动力矩Tb,α对应一定的制动强度z。
2)根据蓄电池SOC值估计蓄电池的最大可充电功率Pchg_b。
3)根据电动机转速ω计算电动机可提供的最大再生制动功率Preg_max和最大再生制动转矩Treg_max。
4)由前两项得到汽车再生制动功率为:

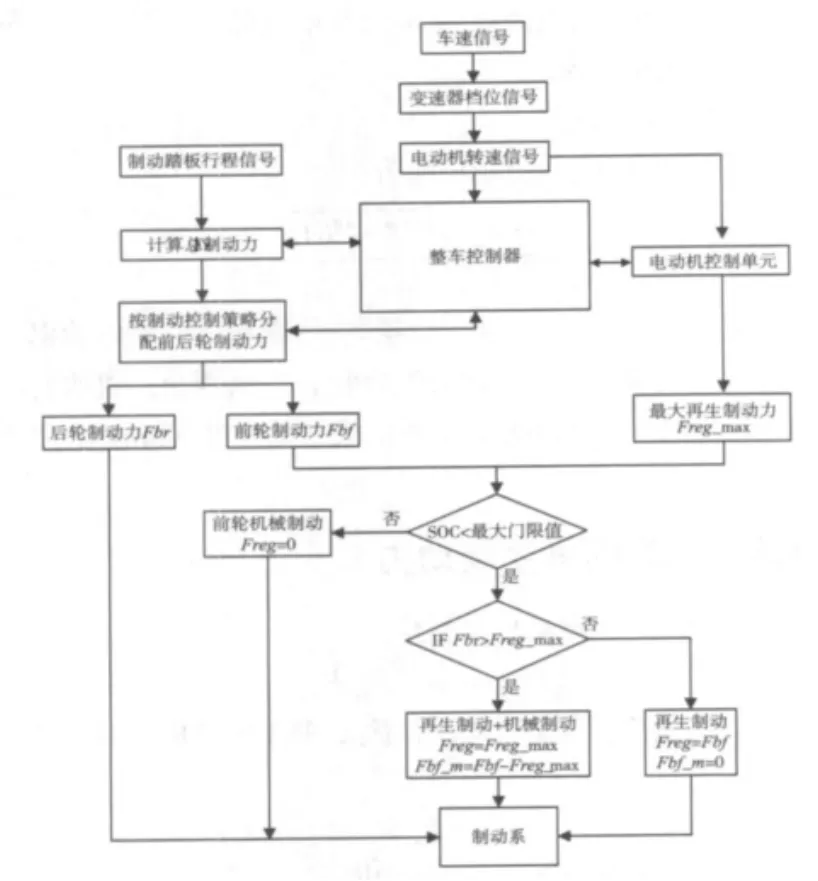
图1 再生制动协同控制策略
由电动机的工作特性求得电动机可提供再生制动转矩Treg,根据式(11)、(12)求得修正后的电动机再生制动转矩,并发送指令给电动机控制单元。5)0<z≤0.12,制动力全部由再生制动力提供,此时Freg=Mgz。(其中:M—整车质量;g—重力加速度。)
6)0.12<z≤0.26,制动力由再生制动力、前轴制动力和后轴制动力提供,此时Freg=0.711 6 Mgz+394.6
7)0.26<z≤0.52,制动力由再生制动力、前轴制动力和后轴制动力共同提供,此时 Freg=-2.86Mgz+2.23Mg
8)0.52 <z≤0.7,制动力由再生制动力、前轴制动力和后轴制动力共同提供,此时Freg=-4.75Mgz+3.26Mg+3 836
9)0.7<z<1,这是一种紧急制动,主要以制动安全为目标,制动力完全由前后轴的摩擦制动提供,此时Freg=0。
2.2 约束优化
综合考虑制动能量回收受诸多因素的制约和限制,文中将HEV的制动力分配策略设计为一个约束优化问题。目标函数是制动能量和制动性能的加权和,各种制约条件构成不等式约束,以电动机制动转矩、系统传动比和前轮机械制动转矩为主要控制变量。
对上述的约束优化问题以t时刻的表达式f(x,t)为目标函数。
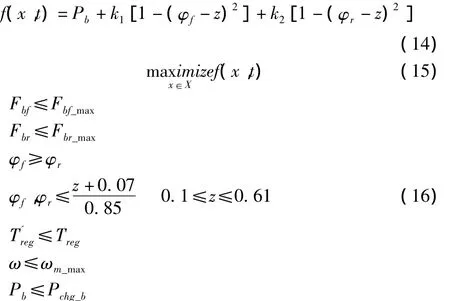

在 z≤0.52 和0.52<z≤0.7 时,权重系数 k1和 k2的取值应有所不同,兼顾能量回收和制动性能。
3 仿真分析
应用运行在matlab平台下的汽车仿真软件advisor来仿真验证新控制策略和制动分配方案的有效性,采用saturn SL1车辆(HEV)详细参数如表1,在典型行驶循环下进行仿真分析。
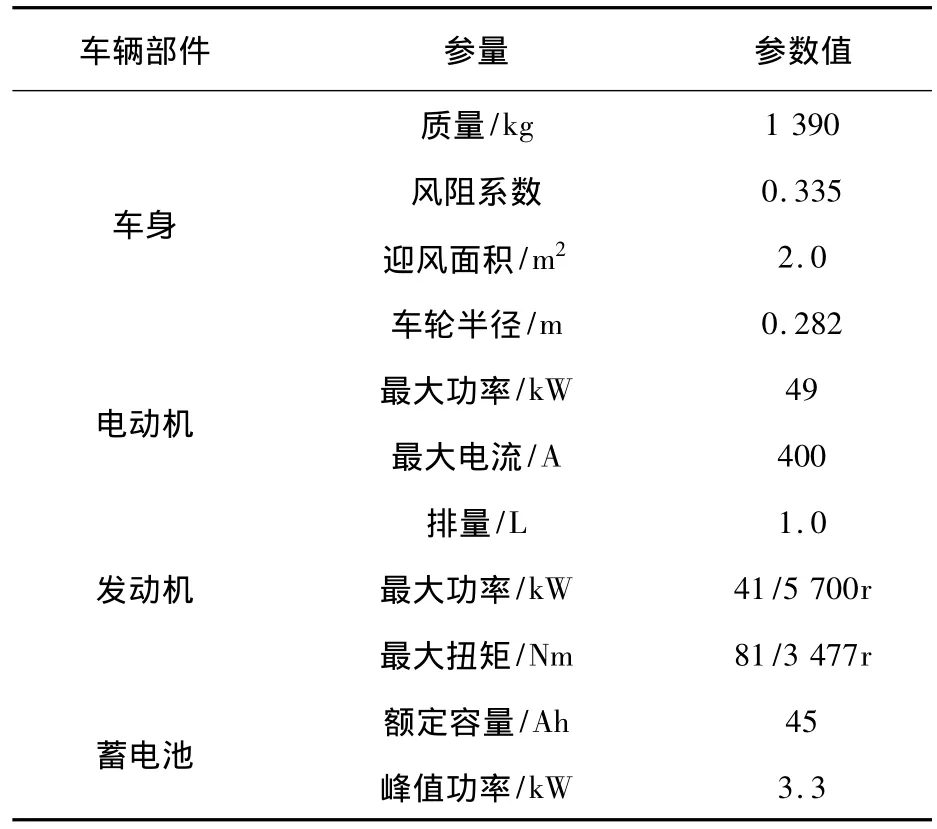
表1 HEV仿真参数
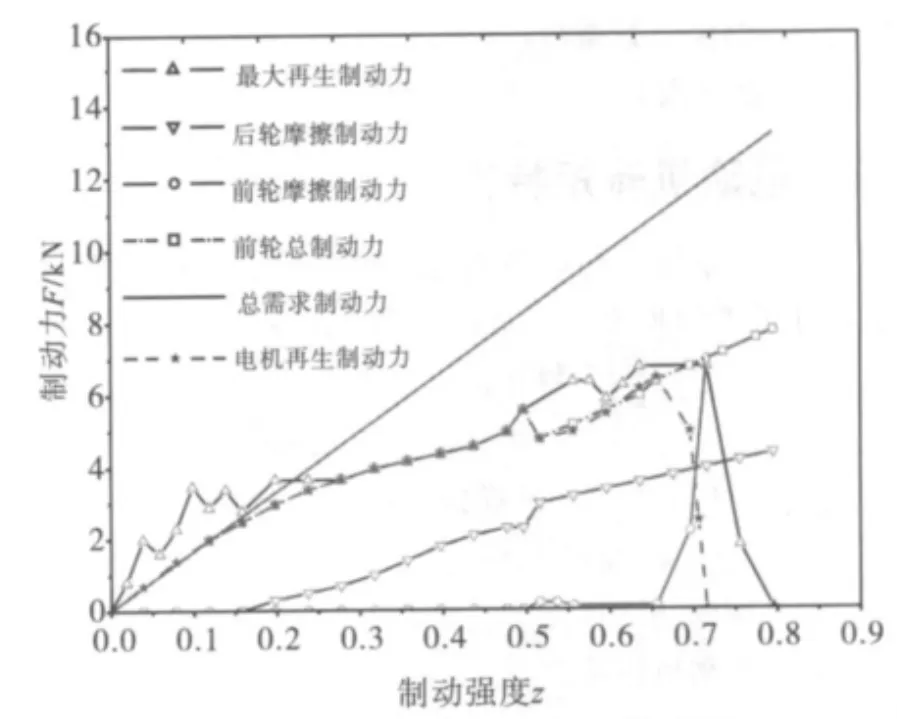
图2 制动力在制动强度下的分配关系
制动强度z从0—0.8之间的制动力分配关系如图2所示,其中制动强度0<z≤0.12时,在这种小制动强度下摩擦制动趋近0,此时电动机的再生制动力较大,需求制动完全由前轮毂电动机再生制动完成;在0.12<z≤0.26时,电动机仍可提供较大的再生制动力,但由于受到ECE法规的限制,后轮必须提供一定的机械摩擦制动力,动态协同分配前轮再生制动力和后轮机械摩擦制动力;在0.26<z≤0.52时,电动机制动力矩接近最大再生制动力矩,在充分进行能量回收并保证制动稳定性的前提下,不足的制动力由机械摩擦制动力补偿;当0.52<z≤0.7时,动态分配前后轮制动力,以制动稳定性为主要目标;当0.7<z<1时,再生制动力降为0,需求制动力完全由机械摩擦制动承担,这是一种紧急制动情况,尽可能在短距离内平稳停车为目标。
图3为车辆在新控制策略下一个行驶循环中能量回收的对比分析,曲线的下降速度代表制动策略优化前后的能量回收率,下降缓慢表明在此工况下制动过程中能量回收的少。从图3可以看出,在200 s的相同行驶循环工况仿真过程中,采用不同的制动策略回收的能量有很大的差别,优化的制动策略能量回收曲线下降速度快,整个行驶循环中储能装置吸收的制动能量有所增加,表明新的控制策略能量回收利用率有了进一步的提高。
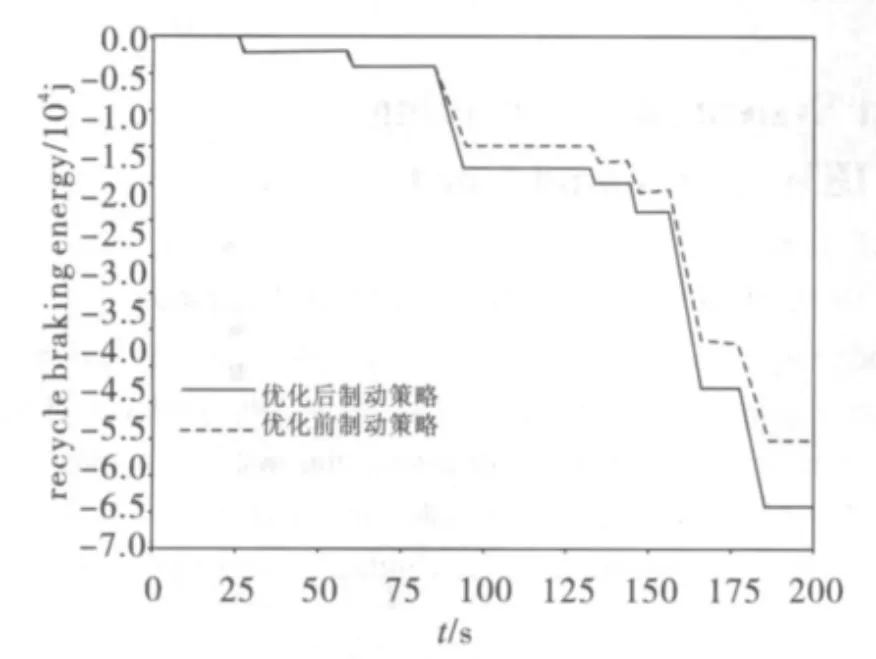
图3 典型行驶循环下制动能量回收的对比
4 结论
再生制动是HEV的关键技术,是降低油耗、提高续驶里程的重要技术手段。在能量回收的相关约束条件下,再生制动控制系统采用动态协同控制策略,合理的分配再生制动力和机械制动力,对制动力与制动强度的关系和制动能量回收进行仿真分析,结果表明,在充分保证制动稳定性的前提下,能量回收有所提高,从而在整个道路循环中减少了发动机的能量输出,降低了油耗,提高了能量回收利用率,实现了节能减排的目的。
[1]爱赛尼(Ehsani,M.)等著;倪光正,等译.现代电动汽车、混合动力电动汽车和燃料电池车——基本原理、理论和设计[M].2 版.北京:机械工业出版社,2010.8.
[2]Banajes Jesus,etal.Three Di mansional Calculation of the Flow in a DIDiesel Engine with Variable Swirl Intake Ports[C].SAE Paper 2001-01-3230.
[3]HOU JUN,GUO XUEXUN.Modeling and Simulation of Hybrid Electric Vehicles Using HEVSIM andADVISOR:IEEE Vehicle Power and Propulsion Conference(VPPC),[C].China,2008.
[4]江勋,黄妙华.基于advisor的电动汽车再生制动控制的建模与仿真[J].北京汽车.2008,(1):26-28.
[5]邓星钟,主编.机电传动控制[M].3版.武汉:华中科技大学出版社,2001.3.
[6]李珂,张承慧,崔纳新.电动汽车用高效回馈制动控制策略[J].电机与控制学报.2008,12(3):325-330.
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
四川冶金(2018年1期)2018-09-25
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
通信电源技术(2016年1期)2016-04-16
探测与控制学报(2015年4期)2015-12-15
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
