
深水半潜式钻井平台锚泊定位系统调试工艺研究
2013-09-27 08:31:42李东亮
船舶与海洋工程 2013年2期
李 东 亮
(中海油研究总院,北京 100027)
0 引 言
深水半潜式钻井平台通常配备的定位系统有锚泊定位和动力定位两种,或者两种组合的定位系统。在两种定位系统都适用的作业水深工况下,锚泊定位系统担当着非常重要的角色。无论是初期投资还是使用和维护费用,相比动力定位系统均具有明显的优势,尤其是在钻(建)井周期较长、天气和海况恶劣(比如台风、寒潮频发季节)的条件下进行作业,采用锚泊定位系统或锚泊定位系统加 DP(动力定位)辅助定位模式,其作业成本将会大幅度降低。随着作业进入深水和超深水,对锚泊定位系统安装精度要求大大提高,系统更加复杂。
1 锚泊定位系统组成及功能
深水半潜式钻井平台“海洋石油981”配备了目前世上最先进的锚泊定位系统,在作业水深500m时,使用12根长1750m直径为84mm的R4锚链组成的12点辐射状锚泊定位系统,分为4组,分别布置在平台主甲板的左前、左后、右前、右后四个角落区域;作业水深在 500~1500m时,则采用锚链跟合成纤维的组合形式。所有的锚链都存储在立柱的锚链舱中,每个舱3根,每根的破断负荷是8418kN。图1为左前角落的锚机布置。
该锚泊定位系统具有电机模式下的高低速收抛锚、动态模式下的高速抛锚、锚泊定位模式、应急释放锚链、应急停止等主要功能。
每组锚机布置包含3台链轮装置,锚机一次只能操作一台锚链轮,锚机的操作是由位于锚机附近的操作室来控制的。左边锚链轮、中间锚链轮、右边锚链轮通过中间驱动轴连接至齿轮箱,其连接是通过液压操作离合器来实现的。其连接指令又是通过操作人员从控制室控制面板发出相应的操作指令后传输到PLC控制柜,再由PLC控制柜的控制逻辑发送给 HPU(液压动力装置),HPU响应后离合器处的液压油缸完成此动作。在平台每个角落的每组锚机甲板下方,设置有一台PLC控制柜、HPU和一组UPS。PLC控制柜用来控制锚泊系统所有的辅助功能,诸如启动HPU、控制面板等等;HPU为刹车带、传动刹车、齿轮箱换挡以及齿轮箱和锚链轮上离合器的操作提供液压动力;UPS则用来在失电工况下执行应急释放功能,其控制可以通过操作人员按下在锚机控制室智能操作椅或者平台中控室的锚机应急释放控制面板上的应急释放按钮后,指令通过UPS(不间断电源)供电线路先后从PLC控制柜-HPU-锚链轮刹车带液压控制缸动作后完成。
抛锚、收锚工作时齿轮箱是通过变频控制交流电动机来驱动的。其控制是通过操作人员从锚机控制室控制面板发出收抛锚指令后,经PLC控制柜传输给平台钻井配电板间VSD(变速驱动),VSD根据与锚机控制系统匹配好的控制程序启动,并提供电机运转需要的电、扭矩和转速,主电机转动后再通过相应的液压离合来驱动齿轮箱工作。
因此,在锚泊定位系统按照厂家要求完成安装后,需要对整套系统进行调试工作来确保系统的安装正确以及各个功能的实现。调试工作可根据如下顺序完成:电缆接线信号检查、液压和喷淋冷却管线信号检查、锚泊系统控制程序与钻井配电板间 VSD匹配、锚泊系统与平台中控系统通讯匹配、锚泊定位系统报警测试、功能测试以及锚机拉力试验。
由于受码头系泊水深小于 50m的限制,锚泊定位系统调试分为在码头完成不带锚链工况下的报警测试、功能测试以及带锚链工况下的拉力试验;海上完成收抛锚、锚抓力试验、锚泊定位测试。
2 调试前准备工作
系统进行调试工作之前,需要完成如下准备工作:
2.1 锚机准备
1) 锚机厂家检查设备安装控制的精度;
2) 确认油压及油位在适当的位置。
2.2 管路准备
1) 在做任何压力测试之前,应确保外部管子已经冲洗到指定的清洁度要求,在所有的接口被正确的清洁后与锚机的管子连接;
2) 液压管线系统应该被正确和完整地安装;
3) 液压管必须在清洗到NAS 7级后工作,并备有相应的证明文件。
2.3 喷淋系统准备
1) 确认管子以及喷嘴按照厂家说明,被正确地安装;
2) 检查喷淋系统用来控制海水服务系统阀的到ICS(Integrated Control System)的控制和接口,海水增压泵启动/停止控制并且特定锚机区域的阀是可操作的;

图1 左前角落的锚机布置
3) 确认当应急释放动作时(模拟),水喷淋的吸入阀也动作。
2.4 电气准备
确认锚机各用电设备电气隔离并可用。
2.5 PLC控制柜进出信号测试
1) 根据厂家的I/O列表测试所有的信号;
2) 存储所有的信号至PLC控制柜;
3) 存储所有的信号与计算值至显示终端;
4) 根据遥控检测信号文件存储所有的遥控检测信号至PLC控制柜;
5) 确认在ESD(应急关断)情况下所有未经验证的线路断开。
3 锚泊定位系统调试工艺
3.1 报警测试
系统报警作为锚泊定位系统正常运行工作的保障,因此调试过程中需要对锚泊定位系统的各个部件运转正常与否以及线路传输正确与否进行报警测试。主要包括HPU报警、传输报警、锚机报警、VSD报警、应急停止报警、应急释放报警、ESD报警以及系统报警测试。
3.2 功能测试(不带锚链工况下)
进行功能测试之前,需要先分别从锚机控制室和齿轮箱按下应急停止按钮完成初步应急刹车测试,以便在测试过程中出现任何问题时能够应急停止,项目有:1) 液压动力装置关闭;2) 变速驱动VSD停止;3) 关闭加热器;4) 散热器关闭;5) 刹车带动作。
功能测试包括:收抛锚测试、抛出、拉进速度和长度测试、动态抛出模式测试、锚泊模式测试、应急释放测试(可用液压动力装置完成或仅用液压动力装置的蓄能器提供动力完成)、应急刹车功能测试(包括操作室中的应急刹车按钮和齿轮箱上的应急刹车按钮的作用)。
3.3 拉力试验
通常,锚机刚开始收锚时,锚爪还埋在土中,加上躺在海底和悬荡在海水里面的锚链重量,要求锚机提供很大的拉力才能起锚。本平台锚机拉力能够达到 2694kN,在电机堵转时更是达到了 3367kN,为了确认锚机的拉力,根据船级社要求在锚机整体安装完成后至少对一台锚机进行拉力试验,检验锚机主电机在堵转时的拉力。本平台锚泊定位系统通过在锚链轮装置底脚处安装了转轴式测力传感器,因而具有实时监测锚泊状态下锚链张力的性能。在设备出厂前测力传感器已经测试并标定完成,做拉力试验也能够检测标定好的传感器,再次验证锚机测力传感器标定的正确性。
图2拉力测试方法,需要安装一个测力计测量拉力载荷,并校核锚机上测力传感器读数。该测力计安装在三角板和锚链之间。
3.4 海上收抛锚功能测试及抓力测试
根据锚地锚泊计算分析结果,并且根据锚地现场环境条件抛出1、7、6、12号锚,见图4。锚被抛到指定位置后,啮合刹车带,检查刹车功能。
1) 抛锚结束后,调整锚链张力将平台初步定位;
2) 浸锚6到12小时,以便锚更好的啮入海底,提高锚抓力。浸锚前张力不宜过大,以免走锚,一般取预定工作张力70%;
3) 浸锚过程中,定位系统应监测船位的变化;
4) 锚链张力和平台位置初步调整后,按照操作手册压载平台至试验水深;
5) 如船位变化不大,开始做锚抓力试验;
6) 将每一对角锚同时拉紧,直到达到锚机工作负荷2600kN,检验锚是否抓牢;
7) 证实试验负荷达到标准要求后,将锚链张力放松。如达不到要求,则应重抛锚;
8) 根据作业水深调整锚链预张力,同时校准船位;
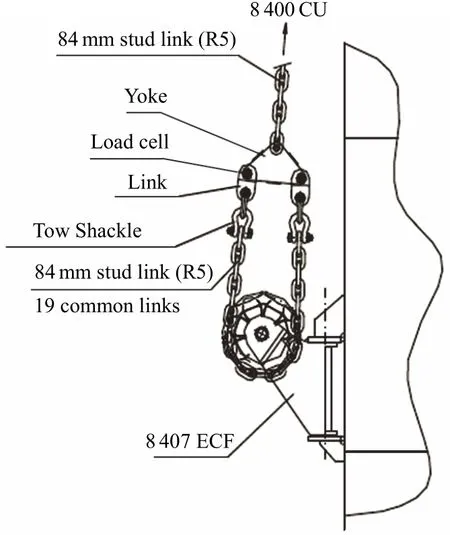
图2 拉力试验方案

图3 锚机拉力试验现场
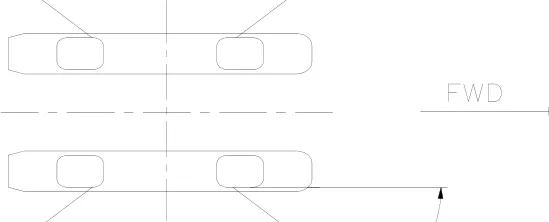

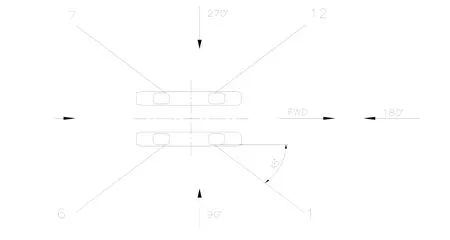
图4 锚地布锚形式
9) 试验结束后将锚拉出,见图5、6,且锚被拉出后收锚速度应该大于9m/min。同时,检查锚链和卸扣通过导向轮,甲板开口,锚链提升装置以及锚链管时的情况。锚链不应该跳动且不能在锚链提升装置上歪曲;
10) 检查锚链冲洗装置的工作情况,见图7;
11) 检查锚爪和锚架的接合情况。

图5 收锚1

图6 收锚2

图7 锚链冲洗
4 结 语
锚泊定位系统在半潜式钻井平台的定位系统中面临新的技术挑战,配置的锚泊定位系统也更加复杂。掌握整个锚泊定位系统的调试工艺,不断积累系统调试经验,缩短系统调试时间,对节省平台的建造费用,缩短建造工期,并为海上平台的精确定位能起到不可忽视的作用。
[1] 盛庆武. 3000t铺管起重船铺管作业锚泊定位系统设计研究. 船舶与海洋工程[J]. 2012, (1): 84-93.
[2] 赵宏林, 张雪粉,等. 浅水铺管船锚机总体结构设计及分析[J]. 机械工程师,2010, (6).
[3] 王晓波, 钟朝廷,等. 铺管船锚机主要结构件的安全性分析[J]. 机械与电子,2010, (9).
猜你喜欢
科技创新与应用(2024年19期)2024-06-30 16:56:09
汽车实用技术(2022年9期)2022-05-20 05:49:52
海洋工程装备与技术(2021年2期)2021-02-24 00:55:00
电脑知识与技术(2015年19期)2016-01-14 12:13:40
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:55
科技视界(2015年27期)2015-10-08 12:34:04
江苏科技大学学报(自然科学版)(2015年3期)2015-03-07 08:27:44
机电产品开发与创新(2014年5期)2014-03-11 16:42:36
船舶力学(2014年5期)2014-01-19 05:50:04
中国矿业(2013年4期)2013-09-07 09:23:36
