
MEMS惯性传感器在控制系统中的应用研究
2013-09-25 14:12李明
电子设计工程 2013年3期
李明
(陕西工业职业技术学院 陕西 西安 712000)
传感器技术的发展使工业系统设计得到了前所未有的进步。就惯性传感器而言,其应用前景广阔,能够改善系统性能或功能的领域包括:低端消费电子类产品、中端工业级及汽车级产品、高端军用级和宇航级产品。这种传感器提供的运动信息非常有用,不仅能改善性能,而且能提高可靠性、安全性并降低成本。
MEMS是微机电系统(Micro-Electro-Mechanical Systems)的英文缩写。它是随着半导体集成电路微细加工技术和超精密机械加工技术的发展而发展起来的,目前MEMS加工技术在传感器制作领域有很多应用,MEMS惯性传感器是一个不错的产品。从最初MEMS线性加速度传感器彻底革新了汽车安全气囊系统开始,从笔记本电脑硬盘保护到航天控制器中更为直观的运动捕捉,各种独特的功能和应用得以实现。
MEMS惯性传感器包括加速度计(或加速度传感计)、角速度传感器(陀螺)、单/双/三轴组合IMU(惯性测量单元)和AHRS(包括磁传感器的航姿参考系统)[1]。
对工程师而言,为了从传感器获取一致的数据,将其转换成有用的信息,然后在系统的时序和功耗预算内做出反应,工程师必须拥有多种技术领域的知识和经验,并且遵循良好的设计规范。尤其是许多工业应用处在恶劣的物理环境下,必须考虑温度、震动、空间限制和其他因素的影响。
工业控制应用是一个很好的例子,MEMS传感器对某种形式的指向或转向设备有着较好的倾斜或角度检测常常是此类应用的核心任务,在最简单的范例中,机械气泡传感器便可满足需要。然而,在明确传感器需求之前,需要分析最终系统的完整运动动力学特性、环境、寿命周期和可靠性预期。
如果系统的运动相对而言为静态,简单的角度传感器可能就足够了,但实际的技术决策取决于响应时间、冲击和震动、尺寸、整个使用寿命期间的性能漂移。此外,许多系统涉及到多种类型的运动(如旋转和加速度等),而且往往在多个轴上工作,这就需要考虑将多种类型的传感器结合在一起。
1 线性速率和角速率
根据谐振器陀螺仪的原理,MEMS结构也可提供角速率检测。两个多晶硅检测结构各含一个“扰动框架”,通过静电将扰动框架驱动到谐振状态,以产生必要的运动,从而在旋转期间产生科氏力。在各框架的两个外部极限处(与扰动运动正交)是可动指,放在固定指之间,形成一个容性捡拾结构来检测科氏运动。当MEMS陀螺仪旋转时,可动指的位置变化通过电容变化进行检测,由此得到的信号送入一系列增益和解调级,产生电速率信号输出。某些情况下,该信号还会经转换,送入一个专有数字校准电路。
传感器内核周围的集成度和校准由最终性能要求决定,但在许多情况下,可能需要进行运动校准,以便实现最高的性能水平和稳定性。
商业级的MEMS惯性传感器主要是用于消费电子类,主要要求是单价低、尺寸小、温度范围窄、因而精度要求低的功能性产品。加速度传感器重量轻、功耗小、一般测量范围1~10~50 g,分辨率 2~10 mg,陀螺一般量程在±300°/s,零偏在500°/h~1 000°/h,因此有些公司的产品不给出零偏指标或给出 0.1°/s~0.5°/s。
工业级的MEMS惯性传感器大多以模块形式出现,对于应用于工业级芯片级产品,还必须进行处理,包括软件和硬件电路,以及对不同工业环境的适应性,大多数要求价格适中,精度一定优于消费类应用加速度传感器的量程选择比较宽 1~500 g,分辨率 1~3 mg,陀螺量程大多 250°/s 以内,零偏在 50°/h~200°/h,汽车级可作为一个工业应用的特殊产品,对其可靠性要求高,同时由于需求数量大,和一般工业要求不一样的是单价要低。
军工级或宇航级的MEMS惯性传感器精度要求高、工作温度范围宽 (-45°~125°),某些兵器产品要求抗冲击能力强(10 000~20 000 g)尺寸要比光纤和机械类产品要小。加速度传感器量程范围宽1~5 000 g,分辨率要0.1~1 mg,甚至更高。陀螺量程要求范围宽 20°/s~1 000°/s, 频响高,50~1 000 Hz,零偏稳定性为 1°/h~50°/h[3]。
2 调理和处理
在工业市场上,诸如震动分析、平台校正、一般运动控制之类的应用都需要高集成度和高可靠度的解决方案,而且在许多情况下检测元件是直接嵌入到现有设备中。
来自MEMS惯性传感器的信息经过处理和积分后,可以提供许多不同类型的位置、方向和运动的输出(见图1)。每种类型的运动都涉及到一系列应用相关的复杂因素,对此必须加以了解。
一旦确定传感器类型和技术后,就得了解和补偿传感器对环境(温度、震动、冲击、安装位置、时间和其他变量)的反应。环境补偿涉及到额外的电路、测试、校准和动态调整,而每种类型的传感器,甚至每个传感器都是独一无二的,因此这又会带来补偿不足或过度的额外风险,除非工程师非常了解传感器特性。最后这一点驱使许多设计工程师采用完全集成的传感器解决方案,以便消除运用和实施过程中的障碍。
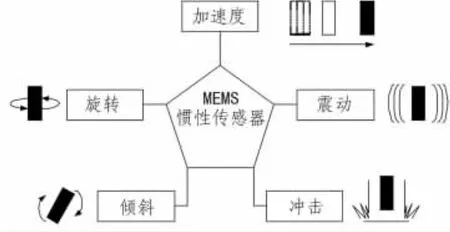
图1 MEMS惯性传感器能够检测的运动类型Fig.1 Movement type MEMS inertial sensors can detect
此外,还必须提供足够的控制、校准和编程功能,使器件真正独立自足。一些应用范例:
消费电子产品,如手机、数码相机、PDA、MP3等必须具备一定的抗冲击或抗跌落能力。这些产品的制造商要求其整机必须能通过1.2 m或1.3 m的自由跌落测试,从1.2 m自由跌落至大理石地面将对整机产生大约50 000 g的冲击力。如果除去外壳和印刷电路板的缓冲作用,施加到加速度计上的冲击加速度也将超过5 000 g[6]。为了抵御这种冲击,制造商要求产品设计师在产品中设计缓冲系统,并采用加速度传感器在第一时间获取跌落信息,同时在第一时间将怕震电子器件的电源关闭,并予以保护,如高速旋转的硬盘、光碟、录像带等均可使它们能够快速地进入暂停状态。
汽车领域里对轮胎压力实时监视系统(TPMS)主要用于在汽车行驶时实时的对轮胎气压进行自动监测,对轮胎漏气和低气压进行报警,以保障行车安全,是驾车者、乘车人的生命安全保障预警系统。为了强化胎压检测功能,现在的TPMS传感器模块内部除了压力传感器、温度传感器还增加了1-2个加速度传感器和电压检测,不仅能实时检测汽车开动中的轮胎压力和胎内温度的变化,而且还能实现汽车移动即时开机、自动唤醒、节省电能等功能[2]。
军工级的产品一般应用于条件恶劣的环境下,例如卫星上的MEMS惯性传感器,惯性姿态测量的基本原理是将速率陀螺测得的角速率信号积分以得到角度(姿态角),利用重力场和地磁场的水平姿态信息和航向信息 (用电子罗盘测量)作为姿态参考信息,并采用Kalman滤波器来实现与陀螺信号的数据融合,从而实时修正陀螺信号的漂移[3]。
工业检测市场异常纷繁多样,必须通过集成嵌入式可调特性,如数字滤波、采样速率控制、状态监控、电源管理选项和专用辅助I/O功能等,来支持各种不同的性能、集成度和接口要求。在其他更复杂的情况下,还需采用多个传感器和多种类型的传感器。即使看起来很简单的惯性运动,例如仅限于一个或两个轴的运动,也可能需同时采用加速度计和陀螺仪检测来补偿重力、震动及其他不符常规的行为和影响。
传感器还可能具有交叉灵敏度,很多时候需要对此进行补偿,即使无须补偿,至少也需要加以了解。此外,惯性传感器的性能指标存在许多不同的标准,这使得上述问题的解决更加困难。当指定角速率传感器要求时,多数工业系统设计工程师主要关心的是陀螺仪稳定性(随时间发生的偏置估算),消费级陀螺仪通常不会规定这一特性。如果传感器的线性加速度性能较差,那么即使0.003°/s的良好陀螺仪偏置稳定性也可能毫无意义。例如,假设线性加速度特性为0.1°/s/G,在旋转±90°(1 G)的简单情况下,这将给 0.003°/s的偏置稳定性增加0.1°的误差。加速度计通常与陀螺仪一起使用,以便检测重力影响,并且提供必要的信息来驱动补偿过程[4]。
面向具体应用的解决方案将适当的传感器与必要的信号处理结合在一起,如果具备高性价比并且提供现成可用的标准系统接口,这些解决方案将能消除许多工业客户过去所面临的实施和生产障碍。为了优化传感器性能并尽可能缩短开发时间,需要深入了解传感器灵敏度和应用环境。校准计划可以针对影响最大的因素进行定制,从而减少测试时间和补偿算法开销。
3 加速度、震动分析
在一些应用案例中,相对简单的传感器输出可能就足够了,但在另一些应用中(例如,通过震动分析进行状态监控),则需要增加相当多的处理过程才能实现所需的输出[5]。
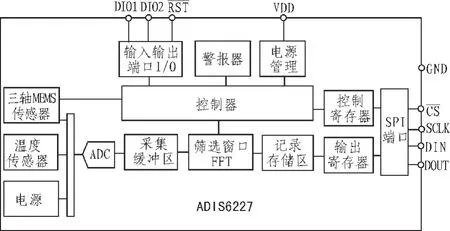
图2 ADIS16227功能框图Fig.2 ADIS16227 functional block diagram
围绕惯性传感器而构建的一个高集成度器件示例是ADIS16227(如图2所示),它是一款完全自治的频域震动监控器。此类器件可能不提供相对简单的g/mV输出,而是提供特定应用分析。在本例中,其嵌入式频域处理、512点实值FFT和片上存储器能够识别各震动源并进行归类,监控其随时间的变化情况,并根据可编程的阈值做出反应。
能够检测和了解运动可能对几乎所有设想到的领域都具有应用价值。大多数情况下,人们希望掌控一个系统发生的运动,并利用该信息提高性能(响应时间、精度、工作速度等),增强安全性或可靠性(系统在危险情况下关机),或者获得其他增值特性。但在某些情况下,不运动才是至关重要的,因此传感器可用来检测不需要的运动[6]。
这些特性或性能升级往往在现有系统上实施,考虑到最终系统的功耗和尺寸已确定,或者必须最小化,MEMS惯性传感器的小尺寸和低功耗特性无疑极具吸引力。某些情况下,这些系统的设计人员不是运动动力学方面的专家,因此,在决定是否进行系统升级时,完全集成和校准的传感器存在与否可能是最关键的因素。
4 结束语
MEMS传感器的各方面特性表明其技术的发展中心已从军工级向商业级和工业级转变,是否能设置好应用时的各项参数才是今后应用时的重点。不同种类的MEMS传感器的的适用条件才是首要考虑的因素。本文小结了一些MEMS传感器的使用范例,在具体应用中还要使用者按照实际情况具体调整。
[1]田文超.微机电系统(MEMS)原理、设计和分析[M].西安:西安电子科技大学出版社出版,2009.
[2]闫利文,俞涛,赵连生,等.基于MEMS技术的胎压监测系统的实现[J].微计算机信息,2006,26:188-190.
YAN Li-wen,YU Tao,ZHAO Lian-sheng,et al.Implementation oftire pressure monitoring system based on MEMS technology[J].Control and Automation,2006(26):188-190.
[3]康学海,王双平.高数据速率“动中通”移动卫星通信终端天线的基本设计与指标说明[C].//中国通信学会.2007中国卫星应用大会会议文集,2007:39-56.
[4]吕海树,杨拥军,徐淑静,等.新型三轴MEMS热对流加速度传感器的研究[J].微纳电子技术,2008(4):219-221.
LV Hai-shu,YANG Yong-jun,XU Shu-jing,et al.Research on a new three-axis MEMS convective accelerometer[J].Micro-and Nano-Electronic Technology,2008(4):219-221.
[5]梁丁.基于MEMS惯性传感器的跌到检测与预警研究[D].大连:大连理工大学,2012.
[6]ZHANG Xia-qing,YANG Shu-xing,ZHAO Lei.The application ofMEMS inertialsensors on spinning gun-launched munitions[C]//Proceedings of 6th International Symposium on Test and Measurement,Volume 3:2101-2104.
猜你喜欢
当代水产(2022年6期)2022-06-29
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
