
一种基于背景减法和帧差的运动目标检测算法
2013-09-25 14:12陈文会樊养余
电子设计工程 2013年3期
陈文会,张 晶,樊养余,马 爽
(西北工业大学 电子信息学院,陕西 西安 710072)
运动目标检测是通过找到图像序列中的运动像素点和静止像素点,从而找到前景中的变化区域,进而将运动的目标物体从背景图像中提取出来。面前,常用的运动目标检测方法主要有3种:光流法、帧间差分法、背景减法。
基于光流法[1-2]的运动目标检测采用了运动目标随时间变化的光流特性,它能有效地实现运动目标检测和跟踪,在摄像机运动存在的前提下也能检测出独立的运动目标,该方法可以达到很好的精度,但计算量较大,实时性和实用性较差。帧间差分法[3-4]是利用视频序列中连续两帧或几帧图像的差异来检测和提取目标,该方法的优点是算法简单,易于实现,程序计算复杂度低,由于连续帧图像之间间隔较短,受光照、镜头抖动等环境因素的影响小,能够适应各种动态环境;缺点是它不能检测出静止或运动速度过慢的物体,对于高速运动的物体又会使得分割区域远远大于真实目标,容易在运动实体内部产生空洞现象。背景减法[5-7]是通过图像序列和参考模型相减来实现运动目标的检测。如果当前图像的像素点和背景图像的像素点灰度值差别很大,就认为此像素点有车辆通过;相反,就认为此像素点为背景点,该方法优点是对于复杂背景下运动物体检测效果较好,实现简单、计算量小,并且能够精确的检测运动目标的位置及轮廓等信息。但是在实际应用中,背景往往会由于拍摄时间的不同,容易受到光照变化、噪声和外物入侵等因素的影响,需要实时的更新背景,并且对于与背景灰度接近的目标不能够完全地检测出来。针对帧差分法易产生空洞以及背景减法不能检测出与背景灰度接近的目标的问题,文中提出一种基于背景减法和帧差的运动目标检测的新算法,该方法既克服两种方法各自的不足,又能获得更全面的运动物体信息,还可对背景进行实时的更新。
1 算法介绍
1.1 背景预测
Kalman滤波器实际上是对随时间改变参数估计的一种最小二乘逼近,它考虑一个随时间变化的状态矢量,并通过一个观察模型测得一组与参数相对应的不同时刻的参数值。
用Kalman滤波来预测缓变的背景图像也可以看作是一种基于运动检测的多帧降噪方法。当图象序列通过滤波器时,图象序列的缓变部分可以与图象中的快速变化部分区别出来。把运动目标看作是对背景图像的均值为零的随机扰动,应用Kalman滤波[6,7-8]的退化公式,即时域递归低通滤波来预测背景。若认为图像点在空间是独立的,时域递归低通滤波的表达式如下:

其中i,j代表一个象素点的坐标,k为帧号。K(k+1)是第k+1帧的时变增益因子,取值介于0~1之间。可以看作是一个按照运动检测信号(帧差信号)来调整的参数。
Y(i,j,k)表示第 k 帧 i,j位置的输入图象值。(i,j,k)表示第k帧i,j位置的背景预测值。α是渐消记忆因子,α值的选择与背景的变化快慢有关,当背景变化较快时,α值应选得小一些;反之,当背景变化较慢时,α值应选得大一些。一般取值在0.95~1.00之间。
通过式(1)可以完成背景的递归估计,实现背景图像的实时重建和更新。利用Kalman滤波器可获得与实际背景图像近似的初始背景,同时达到了滤除颗粒噪声、消除摄像机抖动的目的,为下一步提取感兴趣的运动目标创造了有利条件,而且获得的初始背景的质量不依赖起始时间。
1.2 差分图像二值化
得到背景图像后,将当前帧图像与背景图像进行背景减法运算,所得差值图像中的像素灰度值如大于设定阈值,则为运动目标。其数学表达为:
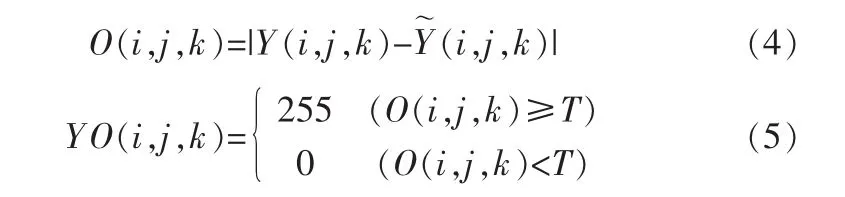
式中:O(i,j,k)是提取出的目标图像每一像素的灰度值;YO(i,j,k)是差值图像 O(i,j,k)二值化以后的每一像素的灰度值;T是阈值,它的大小决定识别目标的灵敏度。
1.3 二值图像或运算
一般用背景减法就能获得运动目标的区域,但是如果运动目标的灰度与背景图像灰度相近,背景减法就不能完整地检测出运动目标的信息。对连续两帧图像进行背景差分[9]、二值化,最后求或运算,就可以解决这一问题。
对相邻两帧的二值图像做或运算,即

1.4 图像后处理
噪声会使一些属于前景运动目标的点被错误地检测为背景点,也会使背景点被错误地检测为前景运动目标点。同时由于背景上物体的轻微扰动也会使这些背景点被错误地识别为运动目标点。为了消除这些影响,需要对获得前景和背景的初步检测结果做一些处理,采用形态学滤波对检测结果进行处理,得到精确的前景目标。
经以上分析,得到算法的流程图如图1所示。
证明 记δQk(x,t)=Qk+1(x,t)-Qk(x,t),δuk(x,t)=uk+1(x,t)-uk(x,t),将式(3)改写为:
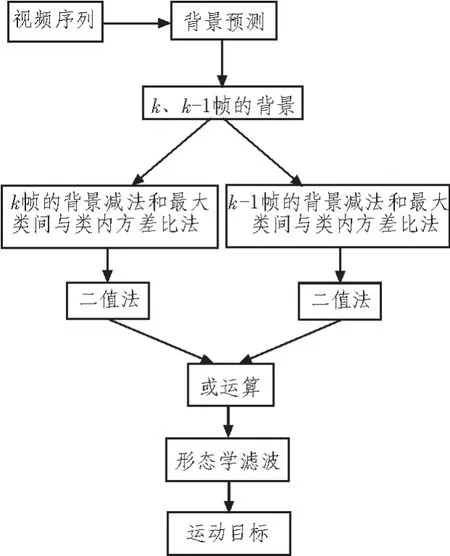
图1 算法流程图Fig.1 Flow chart of algorithm
2 阈值的选择
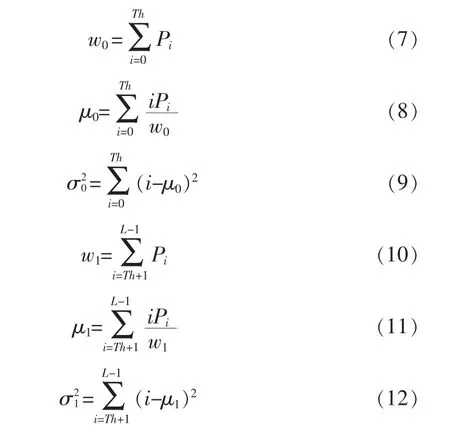
由于方差是衡量图像中像素分布均匀性的一个量度,方差值越大,说明目标和背景间的区别越大。类内的方差越小越好,表明类内具有一定的相似性。最大类间、类内方差比法[10]的基本思想就是寻找一个最佳分割阈值,以使目标和背景间的区别较大,同时类内的区别较小。其算法步骤如下:
1)求出图像中所有像素的概率(Pi=ni/N,i=0:L-1)
2)给定一个初始阈值Th=Th0,将图像分为C0和C1两类,C0={0,1,…Th}、C1={Th+1,Th+2,…L-1}。
3)计算两类的的发生概率 w0和 w1、方差 σ20和 σ21、灰度均值μ0和μ1,以及图像的总均值μ的具体公式如下:


3 实验结果及分析
为了验证算法的有效性,实验视频资料来自自己拍摄的一段视频,对帧速为30帧/s的序列图像(480*640,8 bit)进行仿真。将第一帧图像设为初始背景,取渐消记忆因子α=0.98,采用Kalman时域递归低通滤波来对背景进行实时的更新。图2(a)为原始视频中任一帧图像,图 2(b)是利用Kalman滤波提取背景图像,当前帧图像、背景预测图像转换成灰度后,二者做差分得到运动目标,并采用最大类间与类内方差比法阈值分割得到的运动目标。图2(c)是用帧差法、最大类间与类内方差比法阈值分割后得到的运动车辆。从图中可以看到,分割后的车辆很不完整,边界信息丢失较多。图2(d)是本文算法分割得到的运动目标。从图2(d)可以看出,对连续两帧图像用Kalman滤波得到的背景做差分,再用最大类间与类内方差比法阈值分割得两二值图像做或运算,可以准确地将车辆分割出来。该方法克服了帧差分法易产生的空洞以及背景减法不能检测出与背景灰度接近的目标的问题,检测到比较完整的目标边界信息,但是不足在于,没有对阴影以及远处小目标进行处理,在后期将针对这一问题开展研究工作。
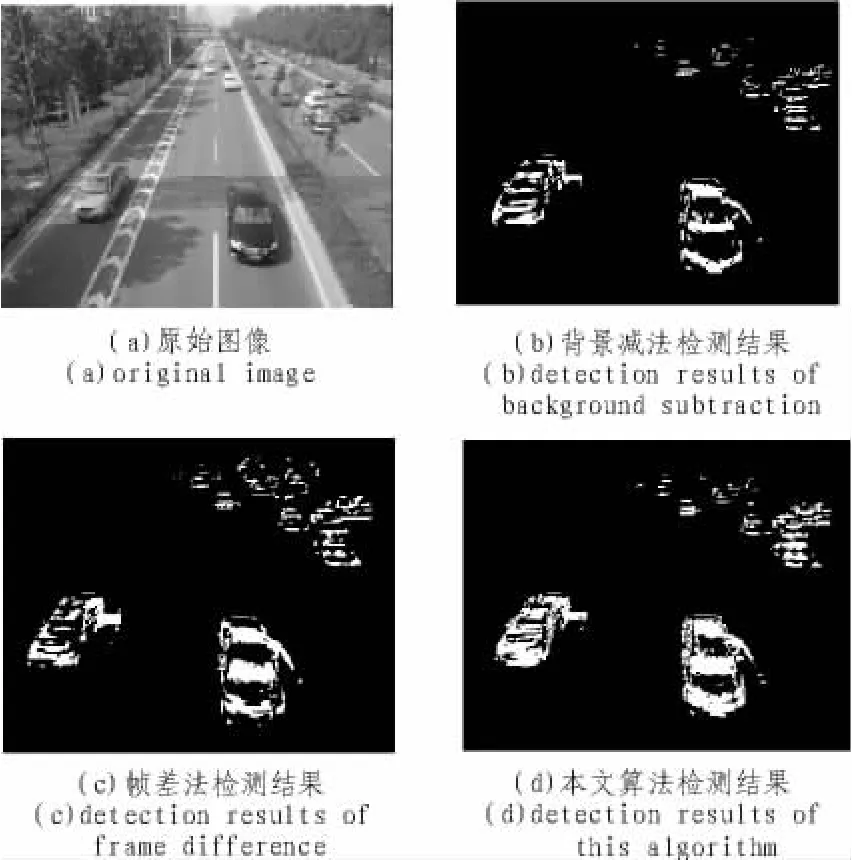
图2 第215帧图像检测结果比较Fig.2 Comparision of detection results of 215thimages
4 结束语
文中提出一种将帧间差分法和背景差分法思想相结合的运动目标检测方法,并采用最大类间与类内方差比法进行阈值分割。通过与帧间差分法、背景差分法等方法的比较实验,表明提出的方法算法简单,易于实现,在复杂的背景中能检测出比较完整的目标信息,提高了抗噪能力。下一步研究工作是在车辆检测的基础上对车辆的车型进行识别以及对交通事件进行实时检测。
[1]YU Wan-xia,DU Tai-xing.Based on color space background difference in traffic video detection[J].Computer simulation,2010,27(1):285-287.
[2]Sasa G,S Loncaric Spatio-temperal in age segmentation using opticalflow and clustering algorithm [C]//FirstInt’1 Workshop on Image and Signal Processing and Analysis Pula Croatia,2000:63-68.
[3]Simon X Y.Fast moving target tracking based on mean shift andframedifferencemethods[J].Journal of Systems Engineering and Electronics,2011,22(4):587-592.
[4]WENG Mu-yun,Guoce H,DA Xin-yu.A new interframe different algorithm for moving target detection[C]//The IEEE International Conference on Image Processing,2010:285-289.
[5]ZHU Juan.Based on hybrid differential method for vehicle[J].Computer Engineering and Design,2011,32(1):332-335.
[6]ZENG Wei,ZHU Gui-bin.Point matching estimation for moving object tracking based on kalman filter[J].The IEEE InternationalConference on Computerand Information Science,2009:1115-1119.
[7]彭接力,刘岩.物体融入背景情况下的目标检测方法[J].电子科技,2012(11):102-104,108.
PENG Jie-li,LIU Yan.Target detection method in case of objects integrating into the background[J].Electronic Science and Technology,2012(11):102-104,108.
[8]CAO Jie,BAI Yan-hong.Detection of moving targets based on Kalman filter and shadow elimination[J].Journal of Lanzhou University of Technology,2009,35(4):84-88.
[9]孙欢,尚绪凤,朱赵龙,等.交通监控系统中帧差法与背景差分法优劣分析[J].电子科技,2012(10):1-3,7.
SUN Huan,SHANG Xu-feng,ZHU Zhao-long,et al.Performance analysis for the frame difference and background difference methods in the traffic surveillance system[J].Electronic Science and Technology,2012(10):1-3,7.
[10]ZHU Hong.The basis of digital image processing[M].Beijing:Science Press,2004:131-132.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
天津医科大学学报(2021年1期)2021-01-26
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
智富时代(2018年12期)2018-01-12
智富时代(2018年12期)2018-01-12
初中生世界·九年级(2017年10期)2017-11-08
自动化学报(2017年5期)2017-05-14
