基于细胞神经网络鲁棒性的彩色图像边缘检测
2013-09-25 02:58:04姜庆玲
图学学报 2013年1期
姜庆玲
(铁岭师范高等专科学校理工学院,辽宁 铁岭 112000)
基于细胞神经网络鲁棒性的彩色图像边缘检测
姜庆玲
(铁岭师范高等专科学校理工学院,辽宁 铁岭 112000)
根据细胞神经网络(CNN)数学模型,提出一种新的彩色图像边缘检测方法。新方法继承了CNN的优点,解决了CNN现有算法不能直接检测彩色图像边缘的问题。该方法充分利用图像中的颜色信息,通过欧几里得距离度量像素之间的差异,使CNN方程可以在RGB彩色空间中进行运算。对CNN模板进行理论分析和鲁棒性研究,提出一个实现彩色图像边缘检测功能要求的CNN鲁棒性定理,为设计相应的CNN模板参数提供了解析判据。实验结果表明,该方法可以对彩色图像进行有效的边缘提取,定量评价验证了 CNN边缘检测定位准确的优点。
边缘检测;细胞神经网络(CNN);鲁棒性;模板设计
现有的彩色图像边缘检测方法中[1-3],有相当部分是灰度图像边缘检测的推广,即首先基于某一彩色分量的图像进行灰度图像边缘检测,然后再将每一独立分量的边缘图联合形成彩色图像的边缘。这些方法忽略了人眼对颜色的视觉感知,没有考虑各颜色分量之间的联系,往往得不到好的边缘检测效果,产生漏检或者伪边缘。而基于彩色空间的边缘检测方法可以充分利用彩色图像中携带的彩色信息。典型的基于彩色空间的边缘检测方法有:基于向量次序统计的方法[4-5]、基于彩色形态学梯度的方法[6]、指南针算子方法[7]等。
边缘检测方法需要根据问题来进行选择,一般有以下几点要求:一是不丢失重要的边缘,不产生虚假的边缘;二是边缘定位准确,实际边缘与检测到的边缘位置之间无偏差或偏差较小;三是可以在彩色空间内对各分量整体处理,充分利用图像中携带的彩色信息;四是考虑应用于实时系统,边缘检测方法应可并行计算和便于硬件实现。
为了满足上述要求,本文将细胞神经网络(CNN)应用于彩色图像边缘检测,提出一种基于CNN的彩色图像边缘检测算法。 CNN方法最突出的优点是能高速并行计算,且处理速度与图像大小无关,便于硬件实现,这使得其在图像实时处理方面具有广泛的应用前景。本文充分利用图像中的颜色信息,同时克服彩色空间角向量距离[8]计算复杂的缺点,通过欧几里得距离[9]度量像素之间的差异,使CNN方程可以在RGB彩色空间中进行运算。对CNN模板进行理论分析和鲁棒性研究,提出一个实现彩色图像边缘检测功能要求的CNN鲁棒性定理,为设计相应的CNN模板参数提供了解析判据。继承了CNN的优点,解决了CNN现有算法不能直接处理彩色图像边缘问题。实验结果表明,该算法可以对不同特性的彩色图像进行有效的边缘提取。
1 细胞神经网络(CNN)的鲁棒性设计
1) CNN数学描述[10-11]
一个标准的M×N的CNN由M×N个细胞排列在M 行N列的长方形矩阵中,第i行第j列的细胞用C(i, j )表示。
标准CNN的状态方程为
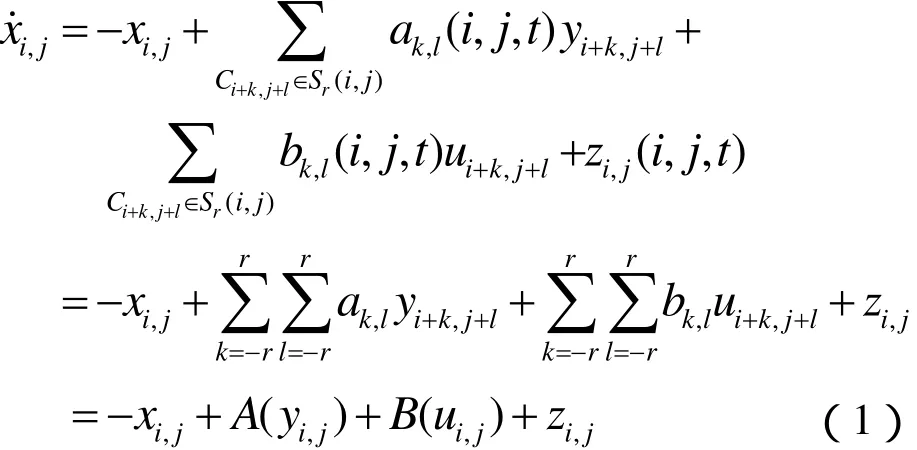
其中jix,,jiy,,jiu,,jiz,为标量,分别称为细胞的状态、输出、输入和阈值。参数r称为影响球半径,参数lka,和lkb,分别称为 A-模板和B-模板。适当选择CNN参数,可以实现不同的图像处理功能。
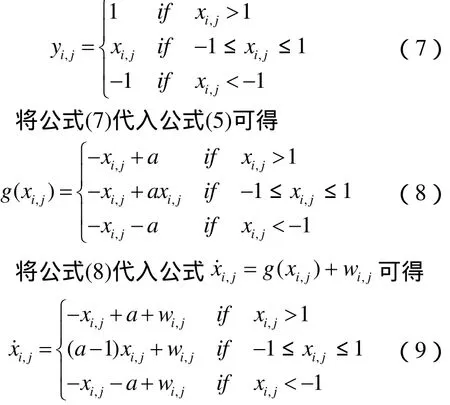
标准CNN的输出方程为

式(2)称为标准非线性方程,如图1所示。
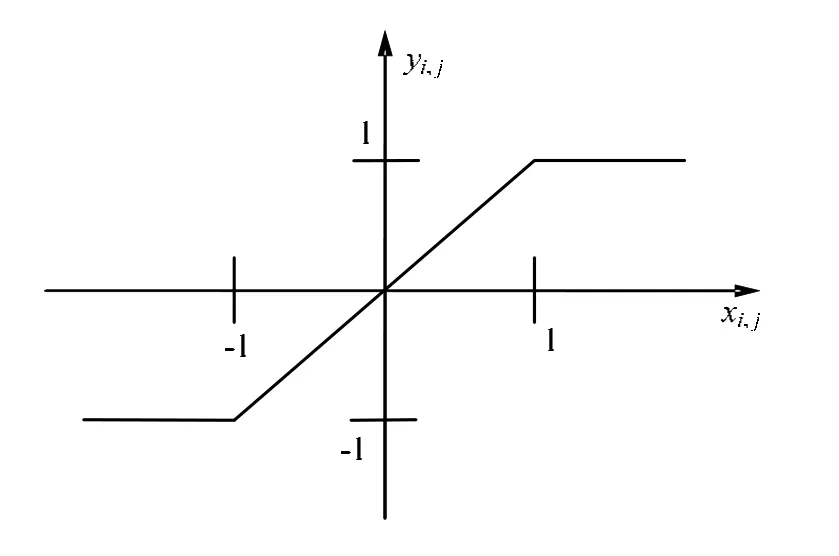
图1 标准非线性输出函数
2) CNN模板设计
定义CNN模板如下
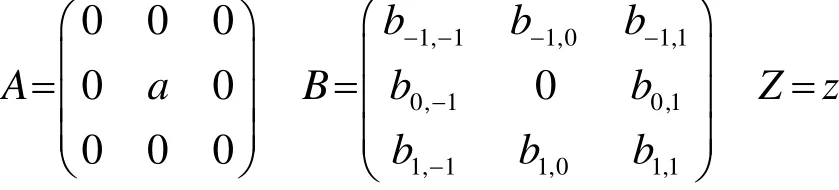
这里 a > 1 , bk,l为非线性函数 bk,l(Δ u),如图2所示,根据CNN的数学描述和彩色空间欧几里得距离,可得
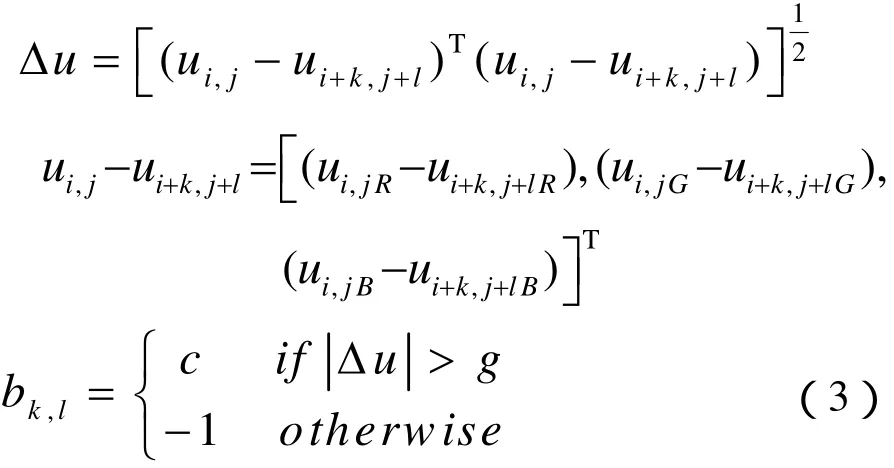

图2 b k,l(Δ u)的非线性函数
3) CNN全局功能

(3) 选择边界条件为循环边界条件;
(5) 用 CNN检测彩色图像边缘就是将输入的彩色图像 U映射成输出的边缘图像 Y,即F:U→Y,通过分析图像中边缘点的特点建立适当的局部规则,进而构造CNN模板参数的取值。
4) CNN局部规则
5) CNN数学分析
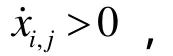
实际应用中,取 1r= ,根据公式(1)得到CNN的状态-输出方程具有如下形式
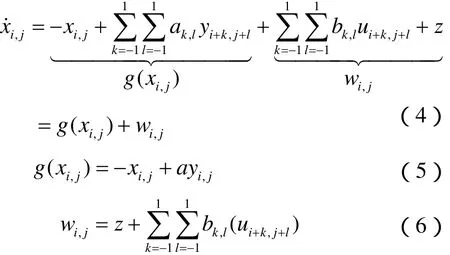
根据公式(2)得
根据公式(9),当过(-1,0)点时, wi,j=a-1,画出动力学曲线,如图3所示虚线 d1;当过(1,0)点时, wi,j=1- a ,画出动力学曲线,如图 3所示。虚线 d2两条动力学曲线属于临界状态的情况,根据 wi,j的不同取值范围,可以得到3类动力学曲线:
(1) 当 wi,j>a-1时,动力学曲线在d1上方的区域,即在区域I中。画出其中的一条动力学曲线,如图4所示的曲线 c1,它与 xi,j轴有一个交点为 Q1。
(2) 当 1 -a ≤ wi,j≤ a -1时,动力学曲线在 d1和 d2之间的区域,即在区域II中。画出其中的一条动力学曲线,如图3所示的曲线 c2,它与 xi,j轴有3个交点分别为 Q2, Q3, Q4。
(3) 当 wi,j<1-a时,动力学曲线在d2下方的区域,即在区域 III中。画出其中的一条动力学曲线,如图3所示,曲线 c3与 xi,j轴有一个交点 Q5。

图3 动力学曲线图
对图3中动力学曲线方向的说明:

从图3可以看出:
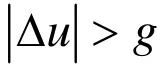
(1) 动力学曲线 c1,当 xi,j(0)∈ (- ∞,∞)时沿着图中箭头所示的方向移动,最终收敛点为Q1点,由于 wi,j>a-1则Q1点的xi,j> 1 ,根据公式(2)可得 yi,j(∞)= 1 。
(2) 动力学曲线 c2与 xi,j轴有 3个交点Q2, Q3, Q4,当=0时(a - 1 )xi,j+ wi,j= 0 可得到在 xi,j上的交点 Q3的横坐标为 - wi,j/ a -1,需要考虑3种情况:
当 xi,j( 0) = - wi,j/a - 1 时该点为收敛点,即Q3点,因为=0,则该点不再移动,根据公式(2)可得 yi,j( ∞) = - wi,j/ a -1。
当 xi,j( 0) > - wi,j/a - 1 时沿着图中箭头所示的方向移动,最终收敛于 Q2点,该点的 xi,j≥1,根据公式(2)可得 yi,j(∞)=1;
当 xi,j( 0) < - wi,j/a - 1 时沿着图中箭头所示的方向移动,最终收敛于 Q4点,该点 xi,j≤-1,根据公式(2)可得 yi,j(∞) = -1。
(3) 动力学曲线 c3,当 xi,j(0)∈ (- ∞,∞)时沿着图中箭头所示的方向移动,最终收敛点为Q5点,由于 wi,j<1-a则Q5点的xi,j<- 1 ,根据公式(2)可得 yi,j(∞) = -1。
由上述分析可以得出

证明1 根据局部规则1,如果像素点 ui,j有至少 3个相邻的点满足条件 Δu > g,则yi,j(∞) = 1 。得

为了得到 yi,j(∞ ) = 1 ,根据公式(10)需要满足wi,j>a-1或满足xi,j( 0) > - wi,j/a - 1 和1 - a ≤wi,j≤a-1,又因为定义CNN模板时取a>1,全局功能中已设定初始条件为 xi,j(0) = 0 ,则
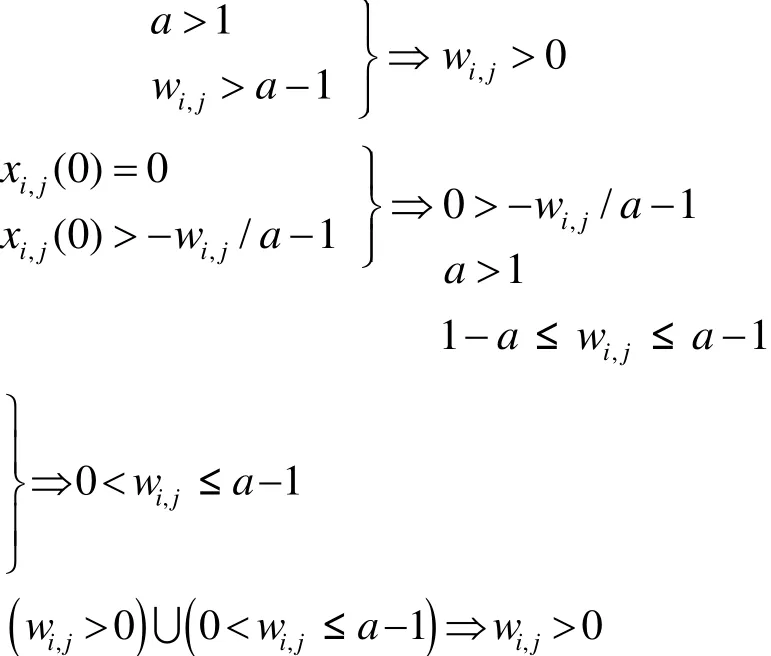
那么在 xi,j(0) = 0 的初始条件下,当且仅当wi,j≥z- 8+(1+ c ) 3 > 0 ⇔ z+ 3 c > 5成立时,yi,j(∞)=1。满足局部规则1,得到 z + 3 c > 5 。证明完毕。
证明2 根据局部规则2如果像素点 ui,j有至多两个相邻点满足条件 Δu >g ,则 yi,j(∞)= -1。得
wi,j= z - 8 + ( 1 + c ) pd≤z - 8 + ( 1 + c )2
为了得到 yi,j(∞) = -1,根据公式(13)需要满足wi,j<1-a或xi,j( 0)< -wi,j/a -1和1- a ≤wi,j≤a - 1,则
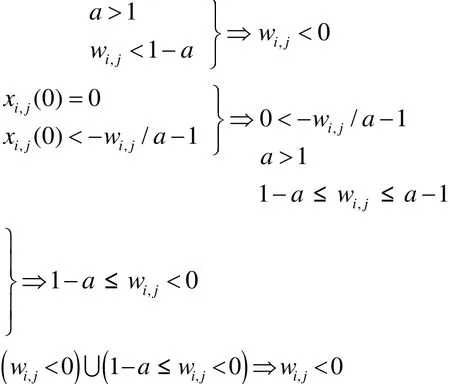
那么在 xi,j(0) = 0 的初始条件下,当且仅当wi,j≤z - 8 + ( 1 + c )2 < 0⇔ z + 2 c < 6 成 立时 ,yi,j(∞) = -1。满足局部规则2,得到 z + 2 c < 6 。证明完毕。
6) 定理 在上述模板条件下,CNN满足彩色图像边缘检测的功能,当且仅当以下条件成立

根据以上求解结果,可以在满足不等式组(11)的范围内选择合适的参数(图4)。选择参数一般遵循以下原则:
(1) 选择距离边界比较远的内部点,这样选择的参数鲁棒性较好。
(2) 尽量选择整数点,这样选择的参数便于计算。根据以上原则,选择 c=2,z=1时,彩色图像边缘检测的结果如图5所示。
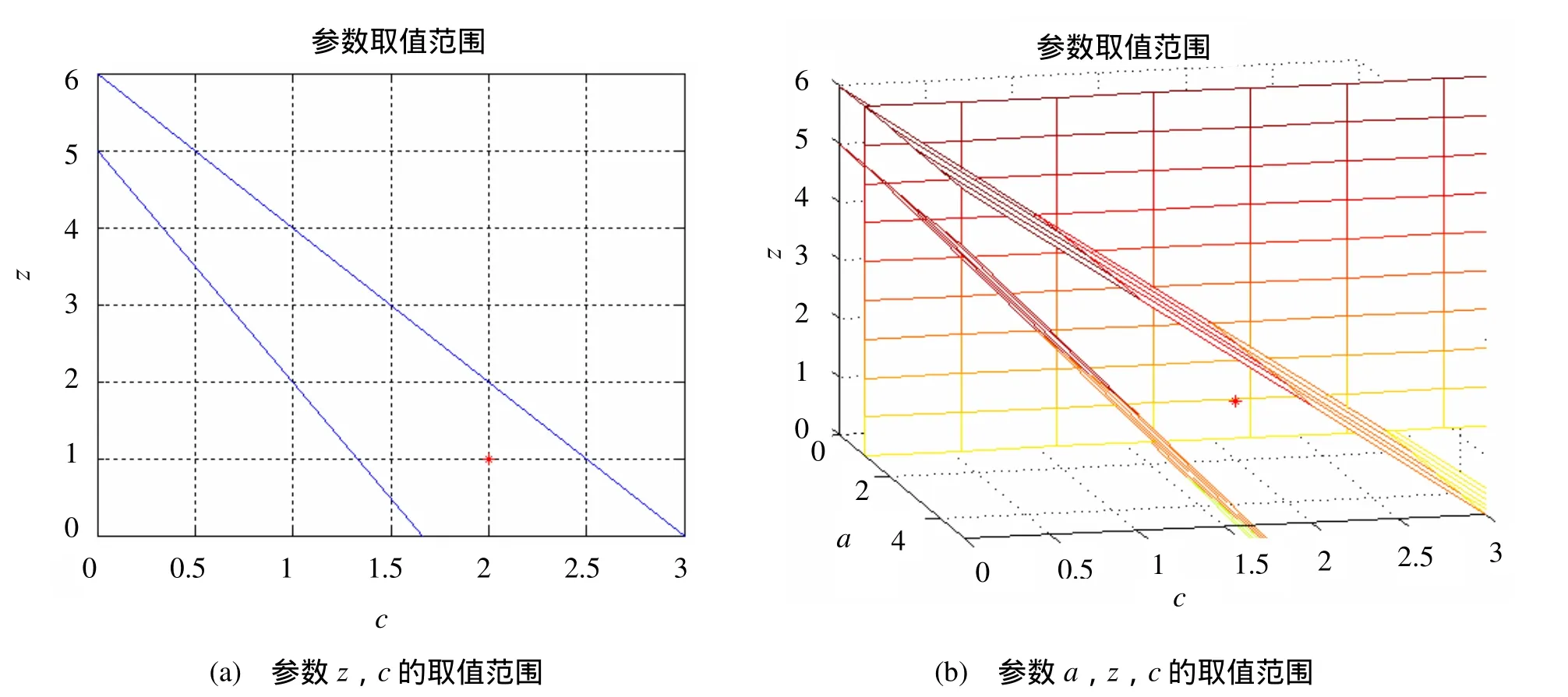
图4 鲁棒性参数取值范围
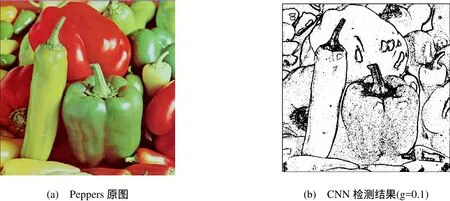
图5 基于CNN的边缘检测结果
2 实验分析及评价
1) 数值模拟
使用本文方法对512×512彩色合成图进行边缘检测,如图 6(a)所示;收敛过程如图 6(b)~(e)所示。由于在CNN全局功能中已经将初始状态设为 X ( 0) = 0 ,根据公式(2)可得 Y的初值为Y ( 0) = 0 ,Y的初始状态如图 6(b)所示,所有像素点都为灰色,随着迭代次数的增加,边缘点逐渐趋向1收敛,非边缘点逐渐向-1收敛。检测结果最后收敛于边缘图,如图6(e)所示。在图6(a)中选择3个典型位置,如图7(a)所示,3个典型位置的像素点分别为红色矩形的点(255,255),绿色三角形的点(127,255),蓝色圆形的点(382,382),其收敛过程如图7(b)所示。可以看出,由于红色的点边缘特征较强收敛比较快,绿色的点边缘特征相对较弱,收敛比较慢,蓝色的点为非边缘点最后收敛于-1。迭代次数可以通过设置收敛误差和最大收敛次数的方式进行控制,当达到收敛误差要求或者达到最大收敛次数时,停止迭代过程。

图6 CNN边缘检测的收敛过程(合成图)
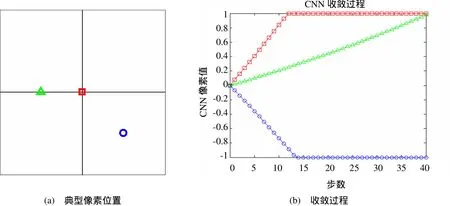
图7 典型像素的收敛过程(合成图)
2) 主观评价
使用本文方法对512×512Peppers图进行边缘检测,如图 8(a)所示;收敛过程如图 8(b)~(p)所示;Y的初始状态如图8(b)所示;随着迭代次数的增加,边缘点逐渐趋向1收敛,非边缘点逐渐向-1收敛。检测结果最后收敛于边缘图,如图8(p)所示。在图8(a)中选择3个典型位置,如图9(a)所示,3个典型位置的像素点分别为红色矩形的点(255,254),绿色三角形的点(127,255),蓝色圆形的点(382,381),其收敛过程如图9(b)所示。可以看出,由于蓝色的点边缘特征较强收敛比较快,红色的点边缘特征相对较弱,收敛比较慢,绿色的点为非边缘点最后收敛于-1。

图8 CNN边缘检测的收敛过程(Pepper图)
使用本文方法对600×800自拍图进行边缘检测,如图 10(a)所示;收敛过程如图 10(b)~(p)所示;Y的初始状态如图10(b)所示,随着迭代次数的增加,边缘点逐渐趋向1收敛,非边缘点逐渐向-1收敛。检测结果最后收敛于边缘图。
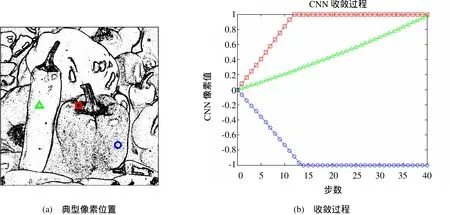
图9 典型像素的收敛过程(Pepper图)

图10 CNN边缘检测的收敛过程(自拍图)
3) 定量评价
采用 512×512彩色合成图进行测试, 如图11 (a)所示,图中A、B、C 3个区域亮度相同,色调和饱和度不同,则这3个区域具有相同的灰度级别。对图 11(a)边缘检测的对比结果如图11(b)~(d)所示,可以看出:图 11(b)和图 11(c)只检测出两条边缘线,图11(d)检测出所有的边缘,证明了彩色边缘检测能获得更准确的边缘信息。图 11(d)的四周有边缘线,这是由于采用了循环边界条件形成的。
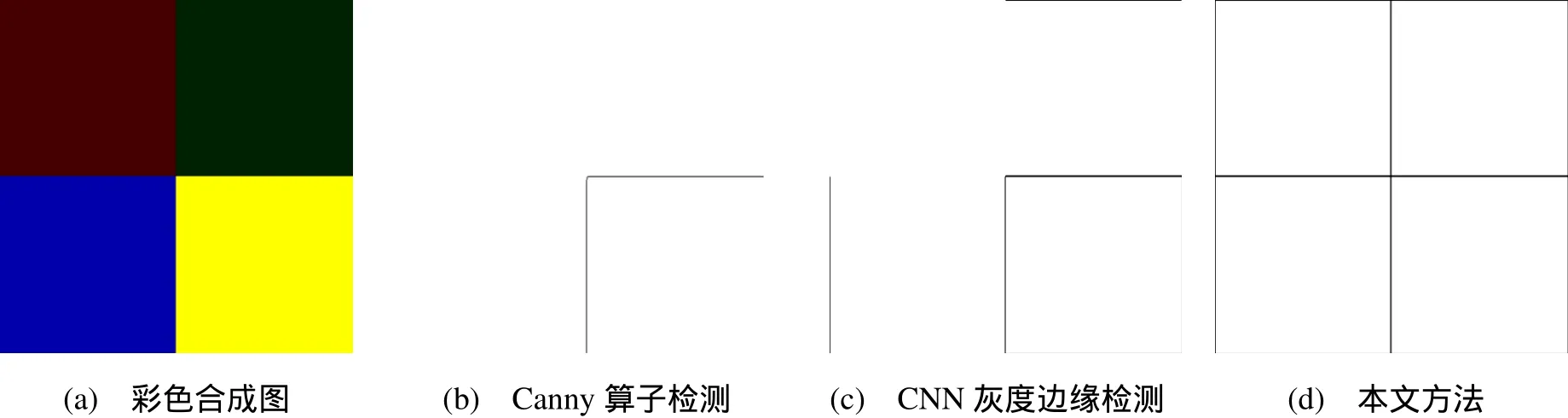
图11 合成图的边缘检测结果
为了定量的分析该算法的优越性,采用文献[12]中所用的定量评价标准。定量评价公式为

式中,II是理想状态下边缘点数目,ID是检测出的边缘点的数目。dk是第k个检测出的边缘点与理想边缘点的距离,dk越小检测的越准确,dk越大越不准确。α 表示一个常数系数,当检测出的边缘点是主边缘线上的点时α =1,当检测出的边缘点是孤立的或分支边缘线上的点时α=0.2。当检测出的边缘图与理想边缘图完全一致时 FOM=1,随着检测误差增大,偏移点逐渐增多,FOM的值将会减小到趋近于0。
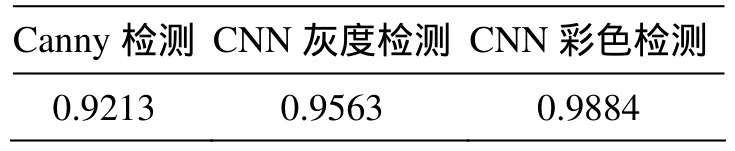
表1 检测结果的FOM值比较
表1列出了用实验中各种算法对合成图所得到的评价指标值。从表1可以看出,本文算法的FOM值明显大于其它算法的FOM值,说明本文算法对彩色图像边缘定位更准确。
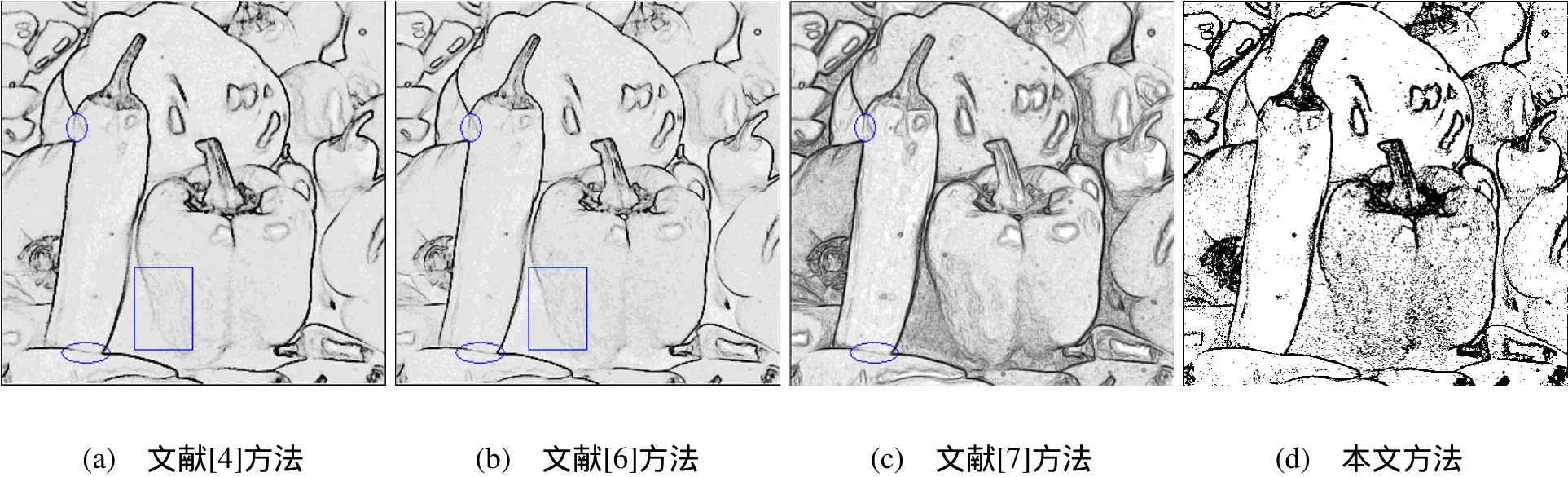
图12 Peppers图的边缘检测结果
4) 与其它彩色图像边缘检测方法比较
使用本文方法以及其它3种彩色图像边缘检测方法对512×512Peppers图进行边缘检测,如图12所示。其中,文献[4]向量次序统计方法中的参数k=7,l =10,文献[6]彩色形态学梯度方法中的参数 s =8,文献[7]指南针算子方法中的参数σ =0.94,本文方法的参数选择a= 2,c=2,z=1,g=0.1。可以看到,文献[4,6]方法对亮度变化较小区域的颜色边缘检测不好,如图 12(a)、(b)中矩形区域,对颜色变化较小区域的亮度边缘检测也不好,如图 12(a)、(b)中椭圆区域。文献[7]方法对亮度变化较小区域的颜色边缘检测较好,但对颜色变化较小区域的亮度边缘检测不好,如图12(c)中椭圆区域。本文方法对以上区域检测较好,对颜色边缘和亮度边缘都比较敏感,如图12(d)。
表2列出了本文方法以及其它3种彩色图像边缘检测方法对 512×512Peppers图进行边缘检测所得到的评价指标值。从表2可以看出,本文算法的FOM值明显大于其它算法的FOM值,这说明本文算法对彩色图像边缘定位更准确。
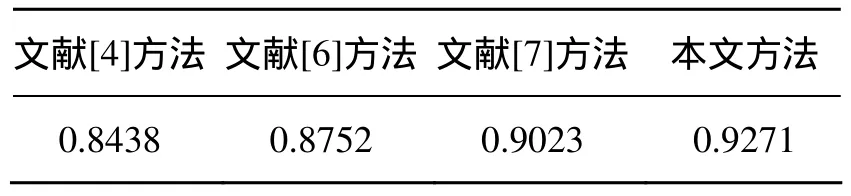
表2 检测结果的FOM值比较
3 结 论
本文提出了一种基于CNN的彩色图像边缘检测算法。在保持了CNN模型主要结构的同时,通过欧几里得距离度量像素之间的差异,使CNN方程可以在 RGB彩色空间中进行运算。本方法具有以下特点:① 实验结果表明本算法较少丢失重要的边缘,较少产生虚假的边缘。② 本算法基于彩色空间距离逐像素点计算(并行),所以边缘定位准确,无像素偏移问题。③ 本算法在彩色空间内对彩色向量整体处理,充分利用彩色图像中携带的彩色信息。④ CNN可并行计算并且便于硬件实现。以上特点分别满足本文前言提出的对彩色图像边缘检测结果的几点要求。
[1]Evans C J, Sangwine S J, Ell T A. Hypercomplex color-sensi-tive smoothing filters [C]//Proceedings of IEEE International Conference on Image Processing,Vancouver, Canada, 2000:541-544.
[2]Pei S C. Cheng C M. Color image processing by using binary quaternion moment-perserving thresholding technique [J]. IEEE Transactions on Imaging Processing, 1999, 8(5):614-628.
[3]Cai C, Mitra S K. A normalized color difference edge detector based on quaternion representation [C]//Proceedings of IEEE International Conference on Image Processing Vancouver, Canada, 2000:816-819.
[4]Trahanias P E, Venetsanopoulos A N. Color edge detection using vector order statistics [J]. IEEE Trans.Image Process, 1993, 2(2):259-264.
[5]Trahanias P E, Venetsanopoulos A N. Vector order statistics operators as color edge detectors [J]. IEEE Trans. Syst., Man, Cybern. B, Cybern., 1996, 26(1):135-143.
[6]Evans A N. Morphological gradient operators for color images [C]//IEEE Int. Conf. Image Process, 2004:3089-3092.
[7]Ruzon M A, Tomasi C. Edge, junction, and corner detection using color distributions [J]. IEEE Trans.Pattern Anal. Mach. Intell., 2001, 23(11):1281-1295.
[8]Dony R D, Wesolkowski S. Edge detection on color images us-ing RGB vector angle [C]//Proceedings of IEEE Canadian Conference on Electrical &Computer Engineering, Edmon-ton, Canada, 1999:289-292.
[9]Rafael C G, Richard E W. Digital image processing [M].Beijing:Pearson Education, 2003:224-246.
[10]Chua L O, Yang L. Cellular neural networks:theory and applications [J]. IEEE Trans. Circuits Syst, 1988,35:1257-1290.
[11]Chua L O. CNN:a vision of complex [J]. Int J Bi-furcation and Chaos, 1997, 7(10):2219-242.
[12]Abdou I E, Pratt W K. Quantitative design and evaluation of enhancement/thresholding edge detectors [J]. Proc. IEEE, 1979, 67(5):753-763.
A novel color edge detection based on robustness of cell neural network
Jiang Qingling
( Department of Polytechnic Engineering, Tieling Normal College of Liaoning, Tieling Liaoning 112000, China )
Based on the cellular neutral network(CNN) mathematical model, a new method of color image edge detection is proposed. It inherits the advantages of CNN, and fills up a gap that the existing algorithms cannot directly detect the color image edge. This method takes advantage of the color information in the image to measure the differences between pixel by the Euclidean distance, allowing the CNN equation for operation in RGB color space.To make a theoretical analysis and robustness research for CNN template, a CNN robustness theorem is proposed that achieves the functional requirements of the color image edge detection, and provides the analytical criteria for designing the corresponding CNN templates parameters. The experimental results show that this algorithm is effective for the color image edge extraction. A quantitative evaluation validates the advantages of the accurate edge detection positioning.
edge detection; cellular neural networks (CNN); robustness; template design
TP 391
A
2095-302X (2013)01-0022-09
2010-11-22;定稿日期:2011-09-13
国家自然科学基金资助项目(60574090);国家高技术研究发展计划(863)资助项目(2007AA01Z160)
姜庆玲(1982-),女,辽宁铁岭人,讲师,硕士研究生,主要研究方向为图像处理与分析、人工智能、模式识别、软件理论及应用等。E-mail:jiangqingling09@163.com;51683759@qq.com
猜你喜欢
小主人报(2022年24期)2023-01-24 16:49:29
儿童时代·快乐苗苗(2022年6期)2022-08-06 07:24:16
农业机械学报(2020年2期)2020-03-09 07:35:30
电子制作(2019年16期)2019-09-27 09:34:46
中华建设(2019年7期)2019-08-27 00:50:18
学生天地(2019年33期)2019-08-25 08:56:18
小天使·二年级语数英综合(2018年7期)2018-09-11 10:32:54
自动化学报(2017年5期)2017-05-14 06:20:56
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11