新型水文巡测遥控缆道设备设计方案的探讨
2013-09-24 10:04林小星
水利信息化 2013年3期
林小星
(广西壮族自治区水文水资源局,广西 南宁 530023)
0 引言
水文流量测验有很多方式,如跨河缆道、超声波、雷达、水工等技术方式,它们各有优缺点[1]。其中水文缆道流量测验方式具有应用技术成熟,设施投资较小,运行费用低,操作人员较少,生产环境安全等优点。但这种缆道设施需要建设缆道房、铅鱼循环索、起重索或配重系统,还要提供三相交流电源,将设备安装在缆道房中才能形成完整的生产能力。在现实环境中,如果没有专人看守缆道设施设备,极容易被人为破坏,造成严重损失。因此,每个测站要建立围墙,增派或委托人员长期值守,增加人工、管理成本,形成驻测的模式,客观上阻碍了水文巡测方式的推广,不利于水文测验方式的改革。
我国水文站网测验发展改革大方向是大量发展巡测水文站,为此,研发一种新型水文巡测遥控缆道设备(以下简称缆道设备),可以到测站现场安装,应具有重量轻、体积小、无循环索、遥控操作、运输方便、使用安全、测验准确、价格合理、运行费低、适用轻型车辆运输等特点,可以在测验完成后运回基地保管。
1 缆道设备设计需考虑的主要问题
新型水文巡测遥控缆道设备是机械、电子测验、计算机、无线电、水文专业等多种实用技术的集成。在设计时,需要研究解决几个主要方面的问题,确定设计目标的基本原则,将各种技术有机地结合,创新观念,实现设备的功能。
1.1 设备应便于运输
目前,国内水文系统的交通工具主要是越野车和皮卡车,从通往交通最困难的水文巡测站的道路考虑,设计主要考虑利用越野车的后厢空间进行运输,车厢内部空间约为:宽度 1 200 mm,前后空间650 mm,高度 1 400 mm。缆道设备包括主机、电池、铅鱼、流速仪、遥控器箱、工具箱,为了给后备厢留下尽可能多的空间,设备及工具的总质量应控制在 200 kg 以内。
1.2 跨河设施的简化及防盗
为了简化跨河设施,设计的缆道设备可取消循环索和缆道房,主要由支柱、主索、信号地线、主机、铅鱼、遥控器组成,两岸支柱宜采用自重式钢筋混凝土框架结构,将钢丝绳主索的端头设计在较安全的地方。
1.3 行车与主机的连接固定
在巡测时,方便安装测验设备是十分必要的,水文遥控巡测缆道的主机与主索上的行车连接是这项技术应用的关键之一。要求将主机吊上高空与安装在主索上的行车连接、固定,传动水平驱动的动力给行车。在流量测验作业完成后,可以方便地松开连接机构,将主机下降到地面。
基本方案是采用直流永磁电机(增加机械抱闸)和大速比的减速机组成升降绞车,由结构定位销将主机与行车连接定位并自锁,通过行程开关、力矩耦合器限制绞车的拉力,防止主机连接钢丝绳断裂,这是关键技术之一。要求最大升降距离10~20 m,升降速度为 5~20 cm/s,起重质量大于150 kg。
1.4 铅鱼、行车定位及水下测验信号处理方式
缆道测验过程中的铅鱼定位,包括水平和垂直2 种运动,水平运动的测量精度为 10 cm,垂直运动的测量精度要求是 1 cm。水平距离和垂直升降传感器均设置在独立的传感轮上,以防止行车打滑或起重过程因钢丝绳叠绕产生过大的误差,提高测量精度。
水下信号通过铅鱼起重索、主机、行车、主索与岸边地线形成的信号回路进行传输,采用水文传统的无线方式。主张采用抗干扰性能良好的双音频信号检测处理技术,传输 3 种信号:水面、河底和流速仪信号。
要重视岸边信号地线的正规建设,保证信号回路的传输效率和长期稳定性。
1.5 电源系统的选择
水文缆道每次作业时间不会很长,可以选择充电电池,最好使用 60 V 锂电池组,电池质量只有几 kg。由于电机的暂载率(电机工作时间与不工作时间之比)低,所以,可以工作较长时间。
1.6 维修及标准化
在保证功能的同时,要充分考虑维修的问题,包括作业维修的空间、配件供应及更换的问题,尽可能选择标准件,这样有利于降低成本和维修费用。设计时可以将设备分档,提供不同起重级别的设备。
1.7 铅鱼质量的减轻
由于设备没有循环索,在选择铅鱼质量时,不用考虑铅鱼在最大跨河距离时循环索自重产生的平衡质量的问题。只需计算铅鱼质量和水流冲击产生的偏角问题,在考虑安全系数的因素下,应用直径较小的铅鱼升降钢丝绳,可以大大减轻设备的自重和电机功率。
1.8 应用范围扩展
应考虑和走航式 ADCP、雷达测流系统及其他新型测验设备的配套应用,以满足新型测验设备所需的安装平台的要求。
2 缆道设备的设计思路
2.1 方案的选择
巡测缆道可以采用不同的方案来实现。方案 1:保留循环索及起重索系统滑轮,铅鱼一直挂在主索上,在巡测时将驱动控制设备安装在支柱的一侧,驱动循环、起重系统。这个方案中的驱动、控制部分比较简单,缺点是有大部分机械装置留在无人值守的测站,设施安全有问题。方案 2:在支柱顶上安装 1 个简易吊机,将巡测缆道设备吊装在主索上,回收时也采用同样方法,采用遥控方式工作。缺点是吊装比较困难,行车轮的摩擦增压装置要独立设置 1 套遥控机构和驱动装置,回收比较困难。方案 3:行车预先安装在主索上,采用遥控方式工作,在现场由主机自身升降完成设备安装。经过综合比较,选择方案 3,测站设施只有主索和支柱,设施安全,安装操作较简单。
2.2 基本构成及安装
2.2.1 设备的基本构成
遥控巡测缆道设备由行车、主机、铅鱼、遥控器、流速信号接收器组成。除主机升降、行车水平运行、铅鱼升降由工作人员按照遥控方式操作之外,其他操作与传统缆道方式一样。巡测缆道各设备功能状态示意图如图 1 所示。
2.2.2 设备的安装
将设备运输到主索下,将行车上预留的升降钢丝绳的一端固定在主机升降机的绞盘上,然后控制主机升降绞盘旋转收紧钢丝绳,将主机提升到行车下方,并与行车结合,此时将铅鱼一起提升。
在主机与行车安装完成后,可以控制行车,下降铅鱼,安装测验仪器进行测验。
2.3 主要机械结构的设计
2.3.1 行车
行车是设备的重要部分,预先安装在主索上,作为主机的行走机构。行车有 2 个轮,其中一个为主动轮,接受主机的驱动力,主动轮下方设置 1 个可调节的弹簧压力轮,提高主动轮与主索间的摩擦力,解决行车靠边爬坡时摩擦力不足的问题;另一个为支承轮,在其轴上安装 1 个旋转编码传感器,提供行车水平运动的距离测量数据。
在行车中心部位安装 1 条钢丝绳,作用是依靠主机上的电机驱动绞盘提升主机到行车底部,让行车与主机连接并自锁。
行车架下设 1 个长杆重锤,作用是保持行车在主索上的垂直姿态,不翻转,保证与主机的连接位置和姿态。行车结构示意图如图 2 所示。主动轮与下压力轮通过调整弹簧增减对主索的摩擦力。
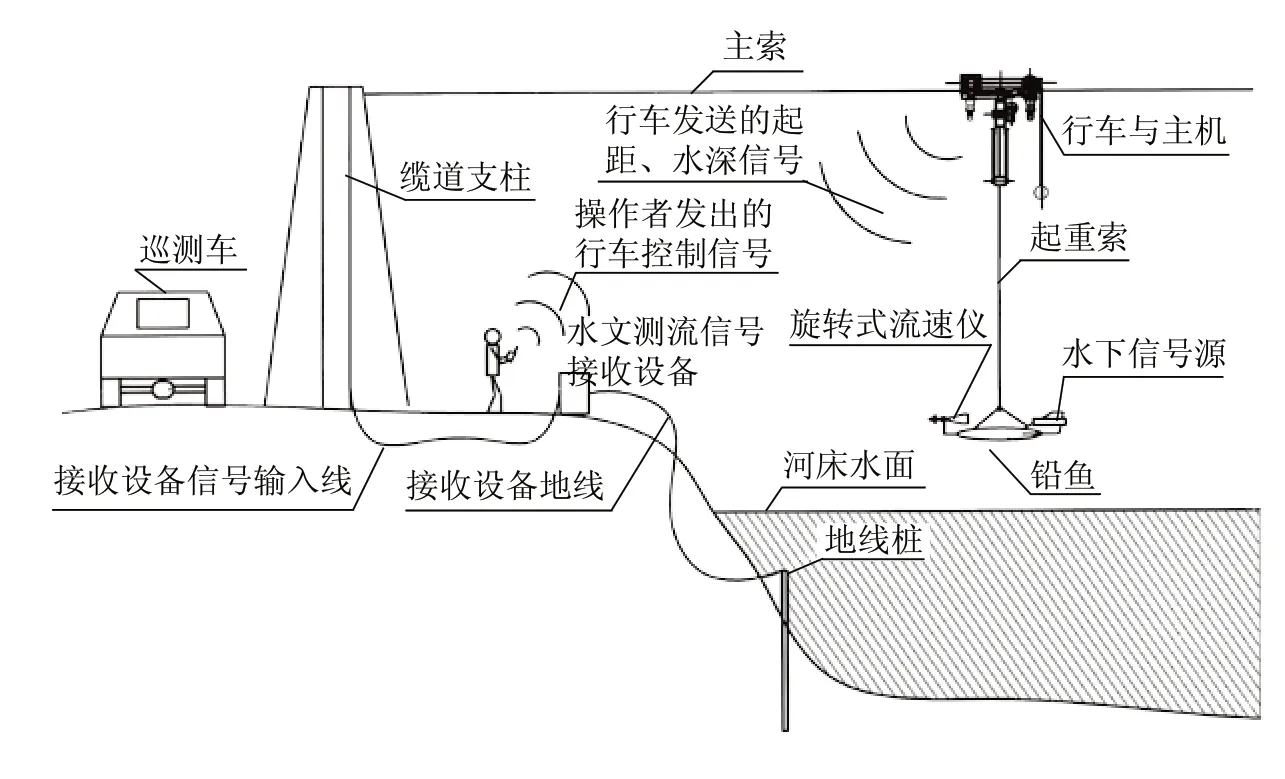
图1 巡测缆道各设备功能状态示意图
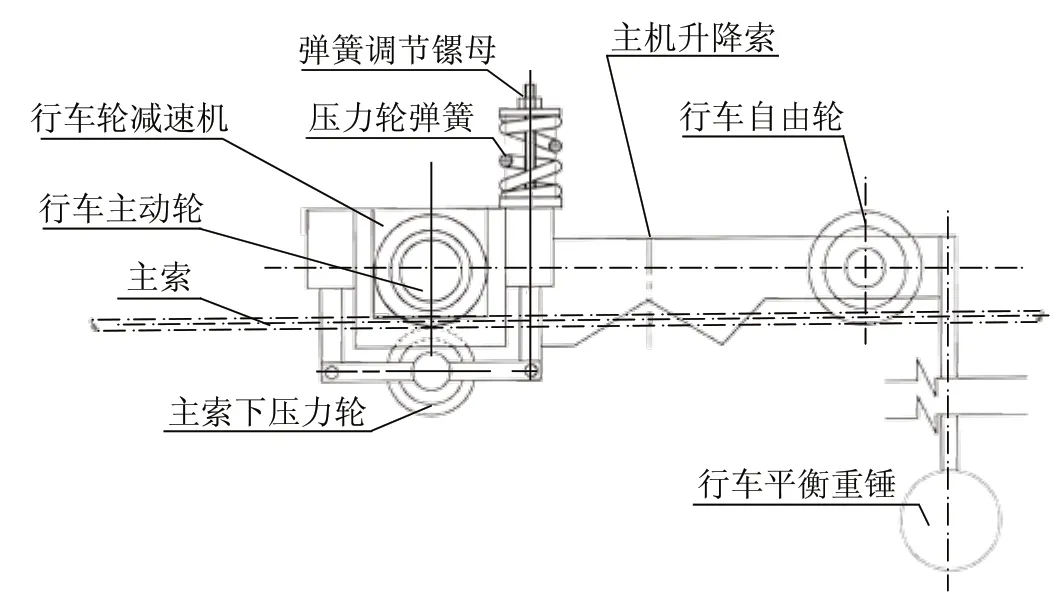
图2 行车结构示意图
行车传动系统的伞形齿结构及滑套型联轴器剖视结构如图 3 所示。
2.3.2 主机及总组装图
主机是设备的核心部件,由主机架、减速机(3 台)、电机(3 台)、升降绞盘(2 个)等部件组成,分别驱动行车水平行走、主机安装时的升降、铅鱼的升降。

图3 行车传动传动结构剖视图
主机与行车的动力传动是由滑套型连轴器完成的,行车与主机连接的轴套由尖形引导头和齿形轴构成,在定位销引导下实现定位后,实现行车的动力连接。绞盘下悬 2 长杆和滚轮组成的铅鱼升降传感器,作用是夹持吊铅鱼的钢丝绳,测量钢丝绳移动的长度,通过光电编码器测量铅鱼的入水深度[2]。巡测缆道行车与主机结构及组装如图 4 所示。主要尺寸:长度约 104 cm,高度(不计算平衡锤和铅鱼位置传感器)91 cm,厚度 40 cm。
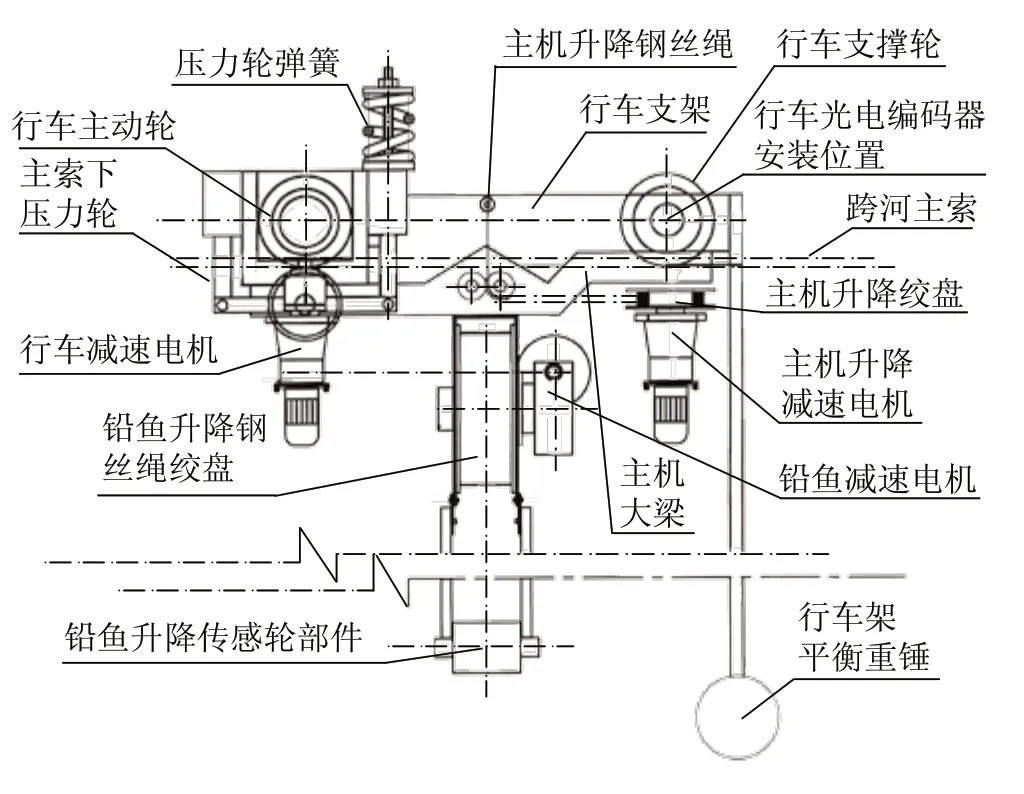
图4 水文巡测缆道设备结构组装图
主机结构及注意事项分析如下:
1)主机升降电机及减速机。由于主机在实际安装与行车连接过程中,要求升降速度很低,且能正反转,所以,可以选择大传动比减速机,电机可选择长寿命的永磁式无刷电机,功率大小,可以根据主机及铅鱼质量计算确定。
2)同轴齿形扭矩偶合装置结构。主机安装升降机构要求在电机输出端安装同轴齿形扭矩偶合装置,配合采用机械限位开关,防止拉断钢丝绳。为电机配套电磁抱闸完成自锁功能。
同轴齿形扭矩偶合装置结构如图 5 所示。
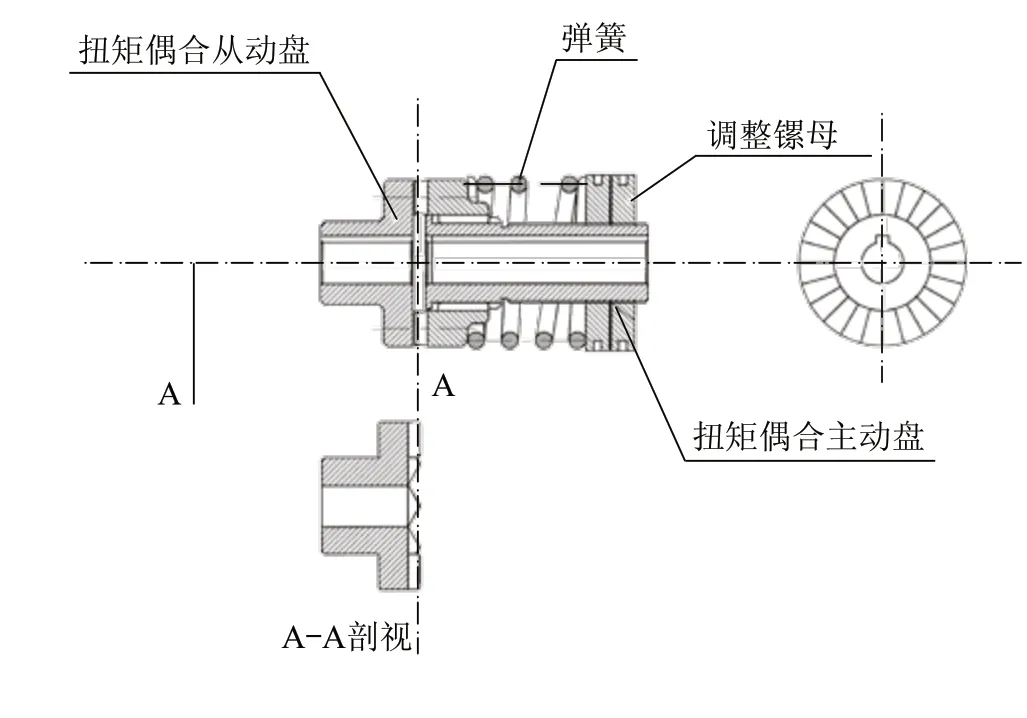
图5 同轴齿形扭矩偶合器
同轴齿形扭矩偶合器的原理是利用斜形齿面在弹簧的压力下实现扭矩的传递,当扭矩的阻力大于预定的力矩后,斜齿面的作用面产生轴向分力,压迫弹簧后退,将扭矩保持在一定的数值内,保证钢丝绳不破断。调整弹簧的压力,保证自锁状态的扭矩,不让铅鱼下滑。也可用高磁性材料制造优良的磁力扭矩偶合器。
3)行车电机及减速机的选择。行车的最大负载情况在靠近支柱两端爬坡时,由于设备运用在中小河流的测验,河道宽度不大,多为 100 m 以下,行车速度要求不高,可以结合行车速度选择电机。
4)铅鱼升降电机与减速机[3]。这是设备核心部分之一,要求有一定的提升能力,连续无级调速,较大的起动力矩,带自锁和精确定位功能。设计最大提升速度以 0.3 m/s 为宜,铅鱼质量 15~100 kg。绞盘设计直径约为 350 mm,直径 3 mm 的钢丝绳每绕 1 周,线长度约为 1 000 mm,绞盘宽度约为100 mm(可根据运用范围确定),铅鱼最大升降距离约 33 m。
5)主机主梁上的定位销及中心的三角形均为方便行车与主机安装时定位而设计,可以根据实践进行修改。
主机与行车的自锁除了由主机升降机系统提供外,还可以增设 1 个小自锁机构。原理是在主机、行车两端适当位置安装自锁机构,当插销进入锁定孔后,由弹簧作用力自动锁定;解锁由电控系统发出信号控制电磁铁拉开锁片。行车与主机连接自锁机构示意图如图 6 所示。
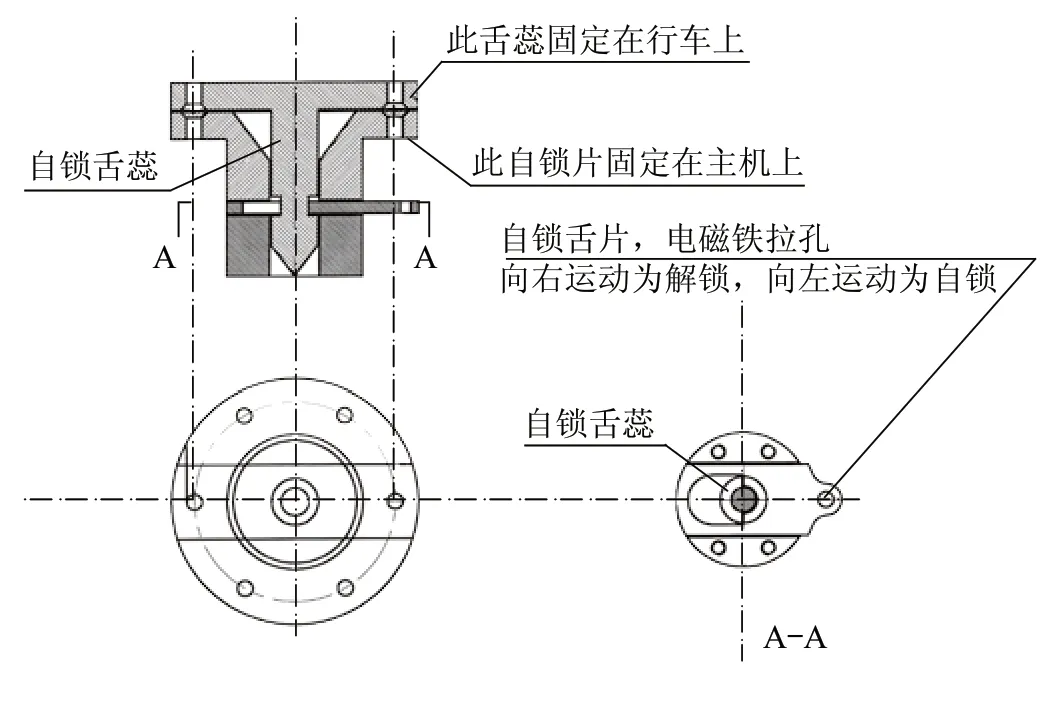
图6 行车与主机连接自锁机构示意图
6)主机安装时注意事项。主机安装时要保持垂直状态。在电池等设备安装完成后,进行配重调整。安装时,主要主梁边上设置 1 根细软绳子,由工作人员在地面牵引安装定位。
要严格按设计文件规定的操作规程进行操作。特别在主机与铅鱼提升的过程中要保证钢丝绳不松开,防止钢丝绳松开后发生乱卷现象。
3 缆道设备辅助控制件的设计
3.1 行车定位传感器
行车定位传感器由光电编码器组成,安装在行车的非驱动轮上,跟随行车轮旋转,产生光电脉冲信号,传输给主机的发射电路。传感器由 4 条电线提供电源和信号回路,采用专门设计的 4 蕊平面镀金接线插头,在行车与主机安装到位时,自动接触电路。该光电编码器的分辨率按 SL344-2009《水文缆道测验规范》要求为 10 cm[4],实际距离可以通过设备参数进行修正。
3.2 主机安装限位开关
在行车与主机连接时,采用位置行程开关进行上限控制,防止电机在到位后继续运行。
3.3 铅鱼升降位置传感器
铅鱼位置传感器采用光电编码器,安装在主机铅鱼绞盘下的传感轮上,传感轮跟随铅鱼升降的钢丝绳一起旋转,产生光电脉冲信号,传输给主机的发射电路。按《水文缆道测验规范》要求分辨率为 1 cm,实际距离可以通过设备参数进行修正。
4 缆道设备的组装及电池组选用
4.1 缆道设备的组装方法
缆道设备各部件整体结构位置要按规程进行以下操作:
1)检查各部件是否完好及正常。将设备搬运到支柱旁,检查设备是否完好,检查铅鱼与主机的钢丝绳是否正常收卷,不能处于散乱状态。将电池安装到位,3 台电机试机动作正常,垂直测深传感器工作正常。
2)安装主机。将行车上原先预留的钢丝绳扣入主机升降绞盘与相关转向滑轮,用遥控器控制主机升降电机运行,收卷钢丝绳,将铅鱼提升到一定高度后,安装垂直传感器的支架及传感轮。将主机升到行车下部,通过主机上的牵绳控制主机在空中的位置,使其与行车正确接合。
3)放下铅鱼,检查水平、垂直测距信号。
4)安装流速仪及信号源,检查是否正常。
5)确定起点距的零点,然后进行测验。
6)测验作业完成后,返回原点,折装设备。
4.2 缆道设备的质量与材质
主机、行车的质量不宜太大,可以采用铝合金制作。电机、减速机、支架均选择铝材,行车轮外壳为钢材,其余为铝质材料。
4.3 电池组
电池组采用锂电池,可以选择电动自行车的充电电池,质量 3 kg 左右。
5 缆道设备遥控、遥测、信号传输系统
5.1 缆道运动遥控系统
遥控巡测缆道的控制方式采用无线电多通道遥控方式,可以选择工业型的遥控器,也可以选择航模型的比例控制器。遥控有效距离要求在 300 m 内,可实现的遥控功能有:主机安装升降的上下运动;行车的水平前进、后退运动;铅鱼的上下运动控制开关功能。
5.2 测距、测深遥测系统
测距、测深遥测系统是将行车和铅鱼的位置传感器信号通过无线电方式发送到岸上接收机的装置,可以通过小功率的无线电方式发送编号脉冲,要求由 2 个独立的不同频率的发射机发送,防止脉冲丢失。接收设备接到信号后,将信号移到计算机进行工作。
5.3 流速测验信号传输系统
流速测验信号主要由水下信号源生产,水下信号源提供 3 种信号:1)水面信号,提供测验的基准水面;2)河底信号,提供河床的深度;3)流速仪信号。可以采用多种传输方式,建议采用双音频编码技术[5]。
水下信号源内部逻辑电路要求保证水面和河底信号优先于流速仪信号,当流速仪信号同时与水面、河底信号出现或先于其出现,只要水面、河底信号一出现,就要中断流速仪信号的发生。这样可以让岸上接收设备及时、准确收到水面或河底信号,并及时停车,为缆道测深建立可靠的基准。这项技术已经成熟。
操作者手持的遥控设备可以与测流的仪器合为一体,做成专用的操作设备。
6 缆道设备高空维修问题
凡是机电设备都有出现故障的可能,如何处理缆道遥控设备的故障,也是产品设计的重要内容之一。为解决行车挂在空中无法维修的问题,提出双主索的设计方案,方法是在支柱两端安装 1 对滑轮,将主索上绕 1 圈,形成双主索,平常一侧滑轮固定,将行车挂在 1 条主索上;当行车出现故障时,只要摇动支柱上的滑轮,就可以将行车收回河边进行维修。
7 结语
综合本文中介绍的方案可以得出以下几点结论:
1)设计方案是可行的。因为采用的技术早已是成熟的,在水文行业中已经普遍应用,如双音频信号发射接收技术在缆道中的应用;又如测量缆道起点距、水深的光电编码技术等,已通过合理的组合设计和创新。
2)投资分析。这是一种投资少,效率高的巡测设施设备。假设:巡测缆道使用时,1 台主设备巡测10 个站点,每个站点只要简易支柱和主索,大约 15 万元,主机 3 万元,共计投资 180 万元;传统的缆道站每个站投资要 35~50 万元,按 50 万元计算,10 个站要投资 500 万元,可节省 320 万元,再加上人员费用,供电系统的投资规模和维护费,后勤系统的费用,综合成本也很高。投资分析证明巡测缆道是有明显效益的。
3)适用性。可以将这种遥控巡测式的缆道设备应用到走航式超声波测流设备 ADCP、雷达测流系统、测沙等其他项目中,改进水文巡测工作。
4)研究方向和论证。今后应该在以下方面进行改进,减轻设备的总质量;简化主机升降机构,行车主机一体化;一体化操作仪;减小主索和起重索直径等。研制一种更实用、经济、安全的水文巡测设备。
[1] 国家技术监督局,中华人民共和国建设部. GB-50179-93 河流流量测验规范[S]. 北京:中国水利水电出版社,2008:8-12.
[2] 成大先. 机械设计手册[M]. 5 版. 北京:化学工业出版社,2008: 300-400.
[3] 程龙泉. 电机与拖动[M]. 北京:北京理工大学出版社,2011: 200-256.
[4] 中华人民共和国水利水利部. SL344-2009 水文缆道测验规范 [S]. 北京:中国水利水电出版社,2008: 29-30.
[5] 水利部水文局. 水文缆道设计规范(征求意见稿)[S]. 北京:中国水利电力出版社,2012: 80-90.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
起重运输机械(2022年10期)2022-06-11
西部交通科技(2021年11期)2021-01-20
西安电子科技大学学报(2019年5期)2019-11-08
语文世界(小学版)(2019年2期)2019-02-24
趣味(语文)(2018年7期)2018-06-26
考试周刊(2016年88期)2016-11-24
少年科学(2014年10期)2014-11-14
科技资讯(2014年23期)2014-10-20
小天使·一年级语数英综合(2014年7期)2014-06-26