新型模糊PID控制在UUV操纵上的研究
2013-09-21 05:34:16周晨石岩峰郑晶晶
船电技术 2013年11期
周晨,石岩峰,郑晶晶
(总装备部车船装备论证试验研究所,南京 210028)
0 引言
在水下航行器的研究中,其操纵控制是较为活跃的方面。水下航行器的操纵控制指航行器借助其操纵装置来改变或保持其运动速度、位置和姿态的性能。由于其简单性及可靠性,PID控制在工程应用中是较为常见的控制算法。在传统的水中航行器的自动舵中,PID控制的应用也较为广泛。1961年,Kerkenberg将 PID控制应用于108型潜艇,这一工作对后面的研究具有很重要的参考价值。从此以后,很多学者开始研究 PID及改进的PID控制在水下航行器操纵控制中的应用[1]。随着水下航行范围的扩大,水下航行器的运动越来越复杂,对其操纵控制的要求也越来越高。单纯的PID控制已经不能满足对水下航行器的操纵要求了。本文将模糊控制与PID控制相结合,吸取了两种控制方法的优点,以达到对水下航行器操纵的满意的控制效果。
1 水下航行器的运动模型
1.1 坐标系
在水下航行器运动的研究中,一般有两种坐标系,一种是定系,固联于地球上;一种是动系,固联于航行器上。如图1所示,定系E-ξηζ是右手正交坐标系,原点E是固定于地球上的某一点,Eξ轴位于水平面,通常以潜艇的主航向为正向,Eη轴位于Eξ轴所在的水平面,按右手法则将Eξ轴顺时针旋转 90°即是,Eζ轴垂直于ξEη坐标平面,指向地心为正;动系O-XYZ也是右手正交坐标系,原点O一般选在航行器的重心处,OX轴指向艇首,OY轴指向右舷,OZ轴指向龙骨。航行器的重心决定于其质量分布,浮心决定于其浸没于水中的外形,从理论上讲重心与浮心是重合的,位于动系的原点处。

1.2 数学模型
根据国际拖曳水池会议(ITTC)和美国造船工程师协会(SNAME)给出的术语和符号体系,水下航行器的非线性运动模型为[2]:纵向运动方程

侧向运动方程

垂向运动方程

偏航运动方程

横倾运动方程
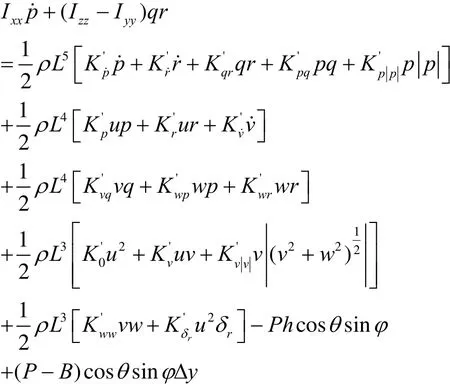
纵倾运动方程
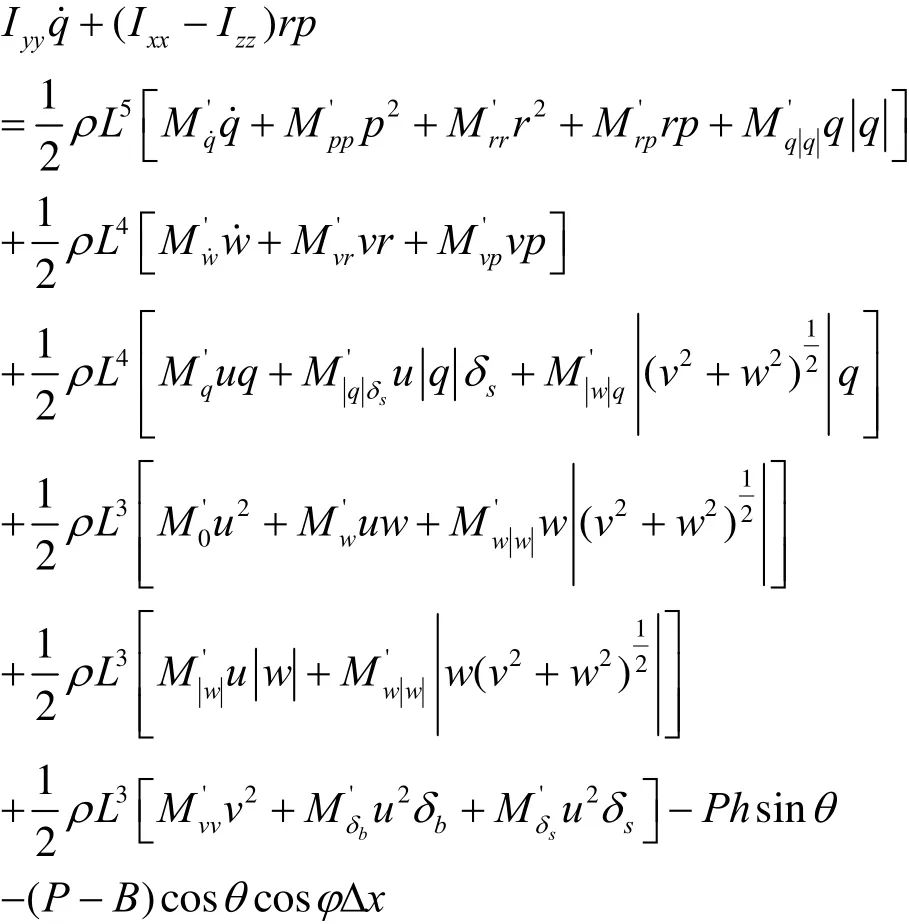
除了上述6个运动方程外,还有辅助方程,但由于篇幅所限不能一一列出。其余的方程及方程中符号的含义,可以参考文献[2]。
2 Fuzzy PI+ Fuzzy ID型控制器
在水下航行器的运动中有很多指标需要控制,有速度、航向、深度及纵倾等。本文以水下航行器的深度控制为例阐述Fuzzy PI+ Fuzzy ID型控制器的原理及其控制效果。

PID控制因为其结构简单并容易实现等优点而被广泛应用。但是对于水下航行器这种复杂的控制对象而言,PID控制往往不能达到满意的效果。模糊控制综合了人的思维、专家知识及经验,往往能够弥补 PID控制的不足。本文所研究的Fuzzy PI+ Fuzzy ID型控制器就是结合PID控制与模糊控制的优点,以达到对水下航行器的良好的操纵控制效果。Fuzzy PI+ Fuzzy ID型控制器的原理结构如图2所示。模糊控制的输入变量主要有一维、二维和三维,控制效果与输入变量的维数有很大关系,一般情况下,维数越高,控制效果越好。但是高维数也会导致控制器的结构复杂,实现起来较为困难。通常情况下,二维模糊控制器应用较为广泛,因为其复杂程度适中,并且精度能够达到要求[3]。
模糊控制器的两个输入量分别是误差信号e及误差变化率de,输出量为舵角δ。设定航行器的深度变换范围为-90<Δζ<90,由于操舵系统的限制,舵角的变化范围为-30°<δ<30°。建立e,de的隶属函数如图 3所示,建立Δkp,Δki和Δkd的隶属函数如图4所示。

PID控制的参数一般是固定的,在Fuzzy PI+Fuzzy ID型控制器中,根据e及de的变化通过模糊规则对kp、ki和kd进行实时调节,从而实现更好的控制效果。kp、ki的调整规则见表1和表2。

?
3 仿真试验
基于上文的论述,在MatlabSimulink环境下建立控制系统框图,进行仿真试验[4-6]。试验初始条件是:航速u0=6 m/s,初始深度ζ0=10 m,舵角δ0= 0°。

?
在试验1中,将深度设定为50 m,其控制响应曲线如图5所示。在与传统PID控制的比较中,可以发现,Fuzzy PI+ Fuzzy ID型控制器在多个方面具有优越性,它的超调量及上升时间都要小很多。

某些控制器只是在特定的工况下才表现出良好的性能,当工况变化时,控制效果也会发生较大偏差。为验证Fuzzy PI+ Fuzzy ID型控制器的鲁棒性,试验2中给出的设定深度在50 m与10 m之间振荡,而控制器的参数保持不变,其控制响应曲线如图6所示。可以看出,在动态的输入中,Fuzzy PI+Fuzzy ID型控制器依然保持较小的超调量及上升时间,具有较好的鲁棒性。
4 结论
水下航行器的操纵控制具有强非线性及模型不确定性等特点,属于比较难控的对象。传统PID控制虽然技术成熟,应用广泛,但是对于水下航行器的操纵来说,很难达到理想的控制效果。Fuzzy PI+Fuzzy ID型控制器将传统PID控制与模糊控制结合起来,综合了二者的优点。仿真试验表明,Fuzzy PI+Fuzzy ID型控制器在多个方面都具有优越性,具有较小的超调量,较短的稳定时间、上升时间,以及较好的鲁棒性,可以适用于水下航行器的操纵控制。

[1]Wang Wenwu, Wang Yi, Yin Kailian. Modeling and smulation of six DOF mneuvering for submarine[C].Proceedings of International Conference on Navigation, Guidance and Control, Harbin, China,2001: 428-432.
[2]施生达. 潜艇操纵性[M]. 北京:国防工业出版社,1995.
[3]张建民等. 智能控制原理及应用[M]. 北京:冶金出版社,2004.
[4]刘金琨. 先进PID控制MATLAB仿真[M]. 北京:电子工业出版社,2004.
[5]Liuang, Miwei, Guo Chen. Study of fuzzy self-tuning steering controller for ship course [J]. Navigation of China, 2010, 33(1): 11-15.
[6]黄友锐,曲立国. PID参数整定与实现 [M]. 北京:科学出版社,2010.
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
科学与财富(2018年25期)2018-10-19 16:09:22
航空工程进展(2018年3期)2018-08-31 02:10:54
西南交通大学学报(2016年3期)2016-06-15 20:29:35
项目管理技术(2016年12期)2016-06-15 20:29:33
电子制作(2016年21期)2016-05-17 03:53:01
西南交通大学学报(2016年6期)2016-05-04 04:13:11
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38