
生产线搬运机构的研究
2013-09-21 07:24刘薇娜
长春大学学报 2013年12期
刘薇娜,吴 迪
(长春理工大学 机电工程学院,长春 130022)
生产线搬运机构的研究
刘薇娜,吴 迪
(长春理工大学 机电工程学院,长春 130022)
目前该生产线的物料搬运为人工搬运,效率低、耗时耗力,本文依据该生产线的实际情况研究了一种生产线半自动化搬运机构,对整个搬运机构进行了总体结构设计,对其轨迹进行了计算,对整个机构进行ANSYS受力分析,验证了方案的可行性。
搬运机构;轨迹;ANSYS;半自动
0 引言
随着工业化的发展和市场竞争的要求,对现在制造工业产品质量的稳定性、生产效率的要求越来越高。现在大部分的机械制造设备的生产效率都已近很高了,而且工艺也极尽完善,完成一个加工工序可能只需要几秒或几十秒的时间,但加工所需的集料和装卡等环节,则因为人工上下料的时间远远超出了其设备加工时间,直接降低了生产设备的有效生产效率。因此在生产现场搬运机构的设计与优化成为一个工厂提高生产效率、降低综合成本的一个必然选择[4]。
目前生产线上搬运机构普遍呈现两种状态一种是完全由人工搬运,全人工作业存在作业周期长、工作效率低、费用高等问题。另一种是用搬运机械手,目前机械手大多采用气缸或液压缸结构,占地空间大,维修困难,维修成本高,对于中、小企业也不适合应用。针对以上问题,本文设计了一种半自动搬运机构,既降低了工人的劳动强度,又能达到自动搬运的效果,该机构成本低、效率高,操作简单,若依据其原理对其进行改进可放置在各种不同的生产线或流水线中,使零件搬运、货物运输更快捷、便利。
1 结构设计及工作原理
整个机构通过人工装卡夹紧之后用伺服电机驱动搬运工件到下一个工作台。图1为搬运机构的一个夹紧部分,整个机构为对称结构,此搬运机构通过对连杆机构的演变而设计,通过扳手带动摆杆作为整个机构的驱动部分,再经过几个连杆连接到夹头,由夹头完成夹紧运动。工件的一面为平面夹紧时底座的底面与工件的平面重合,由两端夹头夹住工件。机构的工作原理如图2所示。
其中图2中的各部分构件为:1.扳手;2.摆杆;3.连杆1;4.连杆2;5.限位销钉;6.连杆3;7.连杆4;8.支撑座;9.限位销钉;10.夹头;11.固定板;12.底座。
要想完成夹紧运动,夹头的运动轨迹是至关重要的,而夹头的轨迹是由连杆4决定的,因此只要对连杆4进行合理的设计就能达到预期的夹头轨迹。本文设计的销钉2和支撑座底面的距离L一定,连杆4的宽度与L相同,故连杆4只能有绕着销钉2旋转以及沿着支撑座底面的上下运动。因此夹头的夹紧运动分为两步,第一、绕销钉2旋转到竖直状态,第二、沿着支撑座底面竖直向上移动到工件位置完成夹紧。当夹紧完成之后由控制器控制电机驱动搬运机构到下一工作台。
考虑到夹头为易损部件,若长时间使用必然会产生磨损使夹紧不牢,若直接更换夹头则成本较高,因此夹头与工件接触部分采用了易于更换的螺钉。
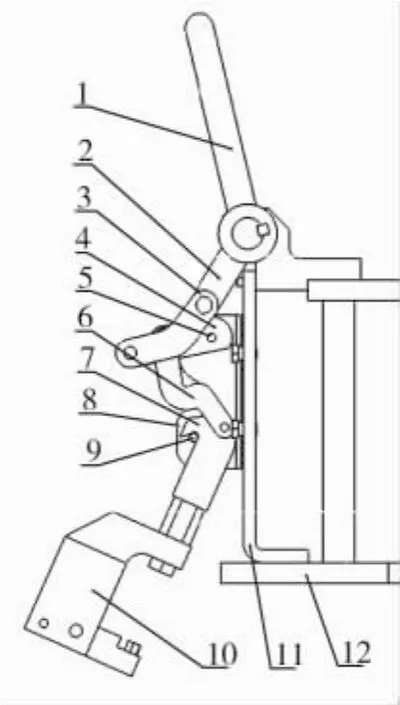
图2 工作原理图
2 运动轨迹的计算
2.1 自由度的计算
机构具有确定运动的条件是其原动件数等于其所有的自由度数,因此自由度的计算对于机构的合理性判断至关重要。在进行自由度计算之前,要绘制出机构运动简图,这样可以将与构件的外形、断面尺寸、组成构件的零件数及固连方式等无关因素去除,方便分析。该机构的运动简如图3所示。
此机构中有6个低副和两个高副,自由度计算公式为

其中PL为低副,PH为高副,从而由公式1得出此机构自由度为:


图3 运动简图
2.2 夹头的轨迹计算
轨迹计算是确定一点运动的常用方法,通过计算可以知道该点的运动轨迹,从而进行分析并进行机构设计,本设计就是采用轨迹计算方法来确定夹头的运动的,本设计机构的简化示意图如图4所示。图示初始状态为松弛状态,要想确定夹头运动轨迹只需确定(x1,y1)点的运动轨迹。

而(x2,y2)点的运动轨迹是固定的,由连杆4决定,其轨迹方程为:

初始位置(手柄竖直状态)x1=40.5,y1=53,可由以上方程联立得x2=10,y2=93.5。
L1、L2、L3、L4构成四连杆机构,由


图4 轨迹计算示意图
得当L1逆时针转动90°(即手柄由竖直转为水平)时L3的转角为120°由此可确定x1=10,y1=27,由公式3-1可得x2=14.5,y2=77.5,由(x2,y2)的轨迹方程可知其运动轨迹为先沿销钉2转32°再向上移动10mm,达到了预期的轨迹。
3 受力分析
ANSYS是目前比较通用的有限元分析软件,通过ANSYS的受力分析我们可以直观的看出整个机构的变形,从而判断机构是否符合设计要求。
在本设计中夹头部分受力最大,而且所受载荷为静载荷,因此对机构进行了静力学分析,受力分析变形结果如图5,从图中可以看出整个机构在夹头部分变形最大,变形量为7.5303e-6,其变形很小,符合设计要求。
4 结语
根据生产线具体的搬运要求,以上设计了一种半自动化搬运机构,并对其夹紧部分的轨迹进行计算,对整体机构进行了ANSYS分析。
经初步实验证明:该机构设计紧凑,使用方便,适合生产线的流水作业,符合设计要求,为类似机构设计提供了参考。

图5 受力分析变形图
[1]孙桓.机械原理[J].北京:高等教育出社,2006.
[2]屈钧利.工程结构的有限元分析[J].西安:西北工业大学出版社,2004.
[3]刘涛,杨凤鹏.精通ANSYS[J].北京:清华大学出版社,2002.
[4]周寿明,邓成良.可用于生产线的工业机器人研究[J].科技创新导报,2008(27):59-60.
[5]彭文生,黄华梁.机械设计[M].武汉:华中理工大学出版社,1996.
Research on the Transportation Mechanism of Production Line
LIU Wei-na,WU Di
(School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022,China)
At present,manual transportation with low efficiency as well as large time-consumption and labor-consumption,is the main means for handling materials in production lines.Based on the actual situation of the production line,this paper presents a semi-automated transportation mechanism,and then it makes an overall structural design for the entire transportation mechanism,calculates its trajectory and carries out ANSYS stress analysis to verify the feasibility of the program.
transportation mechanism;track;ANSYS;semi-automation
TP241.2
A
1009-3907(2013)12-1585-03
2013-10-09
刘薇娜(1956-),女,吉林长春人,教授,博士生导师,主要从事精密、超精密加工、检测技术研究。
book=360,ebook=379
责任编辑:
吴旭云
猜你喜欢
中国铁路(2022年8期)2022-09-22
石油矿场机械(2022年3期)2022-06-17
轻兵器(2022年3期)2022-03-21
一重技术(2021年5期)2022-01-18
装备制造技术(2020年2期)2020-12-14
机械制造文摘(焊接分册)(2018年3期)2018-08-08
汽车实用技术(2017年16期)2017-09-21
制造技术与机床(2017年2期)2017-05-04
现代冶金(2015年4期)2015-02-06
组合机床与自动化加工技术(2014年11期)2014-06-29
