
简易旋转倒立摆及控制装置
2013-09-21 07:23:58王桔
长春大学学报 2013年12期
王 桔
(长春大学 电子信息工程学院,长春 130022)
简易旋转倒立摆及控制装置
王 桔
(长春大学 电子信息工程学院,长春 130022)
设计了一种旋转式倒立摆,系统的工作原理是角度、位移信号经过检测电路获取后,由微分电路获取相应的微分信号,并转化为电压信号提供给驱动电路,以驱动直流力矩电机的运动,通过电机带动旋臂的转动来控制摆杆的运动。本设计结构新颖,它省去了现有直线式倒立摆中复杂的传动机构,使得整体结构简洁紧凑、占地面积小,而且使得与控制方法无关的因素(例如传动机构的故障、误差、非线性等)大大减少,从而增加了控制的精确度、控制效果稳定,使可靠性提高。
旋转式倒立摆;状态反馈;稳定性
0 引言
日常生活中,我们经常能见到一些支点在上而重心在下的摆,如挂钟的摆,这种称为顺摆。还有一种支点在下而重心在上,这种系统或装置,就是倒立摆。
倒立摆系统是一个复杂的、不稳定的非线性系统,由于其自身是一个绝对不稳定、多变量、强耦合的高阶非线性系统而被广泛研究,其控制方法多种多样,在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射等工程技术领域有着广阔的利用开发前景。
1 旋转倒立摆的工作原理
倒立摆系统由直流力矩电机提供动力,控制水平摆杆的运动,水平摆杆与竖直摆杆通过轴承连接,水平摆杆的运动带动竖直摆杆的运动,在水平摆杆与竖直摆杆连接处有一个传感器MPU6050,用来检测竖直摆杆的当前状态,反馈给单片机,单片机根据反馈回来的信号通过姿态计算,改变PWM信号,PWM信号送给LM298电机驱动,改变直流力矩电机转速与方向,使竖直摆杆实现各种姿态。
倒立摆系统的工作原理图如图1所示。

图1 工作原理图
2 系统的工作原理
2.1 电动机的工作原理
当负载增加时,电动机的转速能自动的随之降低,而输出力矩增加,保持与负载平衡。力矩电机的堵转转矩高,堵转电流小,能承受一定时间的堵转运行。
这次设计我们将直流力矩电机作为最终的选择。直流电机具有控制简单,扭矩大,体积小,驱动电路简单,稳定性能强,负载能力强等优点,当负载转矩增大时它会自动的将转速降低,与此同时输出转速会增大。当负载转矩为一定值时对电机端电压进行改变便可进行调速.但是转速的调整率不理想,所以要在电机轴上加测速装置,配上控制器。通过测速装置输出的电压和控制器给定的电压二者相比,进行自动改变电机的端电压.进而可使得电机的稳定性得以改善。
2.2 摆杆的状态检测
将旋转式倒立摆的旋臂和摆杆从自然下垂状态摆起,并能够平稳切换到倒立控制,摆杆的状态检测是先得到摆杆自由下垂的数据传送到控制芯片中,再通过单片机控制电机驱动,摆杆摆动,通过MPU-6050检测到数据,将检测到的数据与最初自由下垂状态下的数值做差,进行循环检测。但检测到摆杆的转动角度范围在-165°到 +165°,再将摆杆垂直进行控制。
3 驱动与控制算法
本设计所选用的驱动是LM298,它是SGS公司的产品,内部包含4通道逻辑驱动电路。是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A一下的电机。
3.1 电源与驱动电路
直流力矩电机电压的驱动和控制中,半导体功率器件(LM298)在使用上有两种方式:即开关驱动方式和线性放大驱动方式,线性放大驱动方式中半导体功率器件工作在线性区里。在开关驱动方式中半导体功率器件工作在开关状态,电动机的电压用PWM来控制,进而实现对电动机的转速进行控制。
电动机的绕组两端的电压平均值U为:

在上式中D为占空比,t=DT,占空比与周期的乘积为开关管导通的时间,D的变化范围是0到1。当电源电压U不变的情况下,占空比D的大小输出取决于电压的平均值U,改变D值也就改变了输出电压的平均值,从而达到控制电动机转速的目的,即实现PWM调速。图2所示为电机驱动模块连接图。

图2 电机驱动模块连接图
在电源与电机驱动上,采用常规的电源设计,并选用性能较高的专用电机驱动芯片。电源与驱动部分为整个倒立摆系统提供稳定的5V直流工作电压和20V直流电机驱动电压,并将DSP单元送出的PWM(脉冲调宽)和DIR(方向)信号进行合成放大,驱动电机工作。
3.2 模型分析
倒立摆系统中,摆杆和旋臂是被控对象,对它们进行动力分析。如图3所示,在惯性系S1中,对旋臂,有

其中,J1为旋臂对转轴的转动惯量(包括电机转轴自身的转动惯性),f1为相应的摩擦系数,m1是旋臂的质量,sinθ1是旋臂的质心到转轴的距离。1为旋臂与垂直线的夹角。G为重力加速度。M0为电机输出转矩:

这里Km、Ke分别是电机的力矩系数和反电动势系数,加在电机上的控制电压为u。摆杆对旋臂的作用力矩为M21。



图3 系统模块分析
3.3 软件设计
本设计的软件流程图为图4所示。
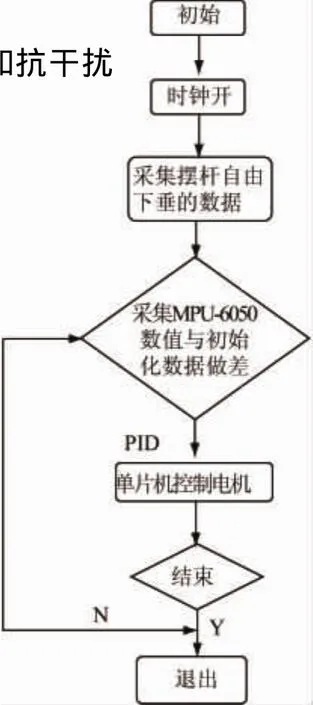
图4 软件流程图
4 测试结果分析
通过测试结果的分析我们了解到倒立摆系统可以实现基本的功能但在其稳定性和抗干扰能力方面还需要进一步的改善和提高。
5 结语
采用具有独立数据处理功能的控制芯片作为核心器件,并采用MPU-6050对数据进行理设计而成的简易旋转倒立摆装置,提供比较强大的功能和灵活的结构。在软件方面我们采用PC与单片机结合的方式,提供多种运行模式,在控制算法方面,用状态反馈方法和能量分析方法实验了比较完整的摆动—倒立控制,但对其稳定性和抗干扰能力上还需要进一步的调整和研究。
[1]姚琼荟,黄继起,吴汉松.变结构控制系统[M].重庆:重庆大学出版社,1997.
[2]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
[3]张雄伟,曹铁勇.DSP芯片的原理与开发应用[M].北京:电子工业出版社,2000.
[4]王宏璨,邵惠鹤.现代控制导论[M].北京:中国石化出版社,1992.
[5]周衍柏.理论力学教程[M].3版.北京:高等教育出版社,2009.
[6]李建忠.单片机原理及应用[M].西安:西安电子科技大学,2002.
[7]吴运昌.模拟电子线路基础[M].广州:华南理工大学出版社,2004.
[8]阎石.数字电子技术基础[M].5版.北京:高等教育出版社,2006.
A Simple Rotary Inverted Pendulum and Its Control Device
WANG Ju
(College Electronic Information Engineering,Changchun University,Changchun 130022,China)
This paper designs is a kind of rotary inverted pendulum,the working principle of the system is to obtain corresponding differential signals by differential circuit after the detection of angle and displacement signal,and then translate them into voltage signals to provide the driving circuit and to drive the movement of DC torque motor and to control the movement of swinging rod by the rotation of the motor operating spiral arms.This design with new structure saves the existing complex transmission mechanism in linear inverted pendulum,making the overall structure simple and compact and occupy small space,and making factors that has nothing to do with the control method(such as fault,error and nonlinear,etc.)greatly reduce,so as to increase the control precision,stable the control effect and improve the reliability.
rotary inverted pendulum;state feedback;stability
TP275
A
1009-3907(2013)12-1538-03
2013-09-16
王桔(1980-),女,吉林长春人,讲师,硕士,主要从事电子与通信工程方面的研究。
责任编辑:
吴旭云
猜你喜欢
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
测控技术(2021年10期)2021-12-21 07:10:20
塑料包装(2019年6期)2020-01-15 07:55:48
设备管理与维修(2019年14期)2019-06-16 02:02:32
现代机械(2018年5期)2018-11-13 10:06:16
通信电源技术(2018年3期)2018-06-26 06:33:32
制造业自动化(2017年2期)2017-03-20 14:26:18
光学精密工程(2016年6期)2016-11-07 09:08:02
装备制造技术(2016年7期)2016-09-26 09:21:36
制造技术与机床(2016年3期)2016-08-31 04:02:37
