划切加工中晶圆的图像识别
2013-09-17 01:49:22孟宪俊张文斌
电子工业专用设备 2013年7期
孟宪俊张文斌
(中国电子科技集团公司第四十五研究所,北京 100176)
划切加工中晶圆的图像识别
孟宪俊张文斌
(中国电子科技集团公司第四十五研究所,北京 100176)
针对划切设备加工中的一种常见材料LED蓝宝石晶圆,来实现全自动对准与划切的要求,对于如何通过晶圆图像进行定位对准,详细阐述了一种基于边缘检测和模板匹配的定位方法。
划切加工;图像识别;定位;晶圆;
本项目研制的划切加工设备主要针对高亮度LED蓝宝石晶圆以及可控硅、砷化镓、碳化硅等半导体材料进行精密切割。在原有手动操作设备的技术基础上,对图像自动对准、光路设计等进行了进一步的改进,实现了晶片对准和划切加工的全自动操作。该设备的研发成功,提升了设备的性能及市场竞争力,进一步推进了LED划切加工设备的产业化进程。设备中基于图像检测的晶圆识别对准,是实现自动对准划切操作的必要前提。
1 图像采集
图像采集结构如图1所示。主要由三部分组成:工作台、图像采集、图像处理。其中图像采集包括:CCD相机、物镜以及LED光源;蓝宝石晶圆放置在工作台上,工作台可沿X、Y和方向运动。本系统中有两个CCD相机,设备工作时,工作台首先移动到1号CCD相机下,拍摄蓝宝石晶圆的整体图像,用于识别晶圆外边缘;接着,工作台移动到2号CCD相机下,拍摄蓝宝石晶圆的细节图,用于识别晶圆内部街区。通过晶圆外缘的识别,来确定划切切割的起止点;而晶圆内街区的识别,则可以矫正晶圆与工作台上划切道的角度偏差。
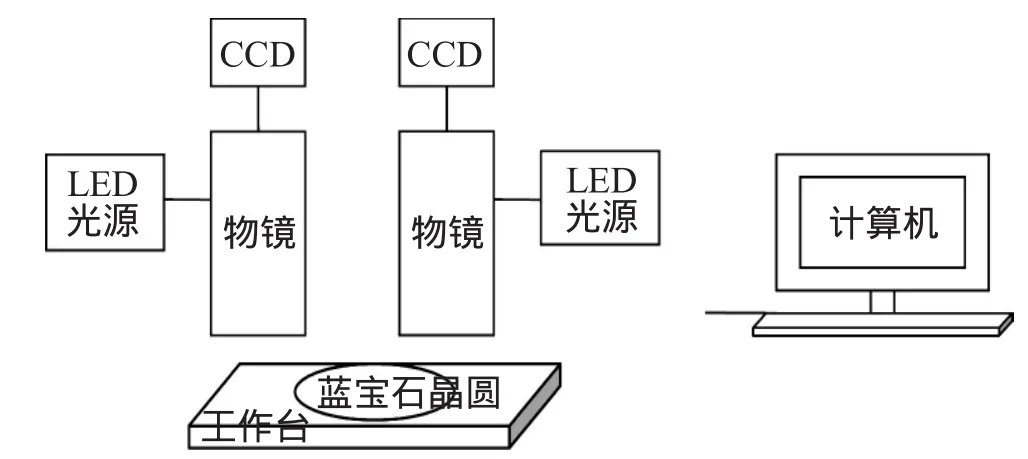
图1 图像采集示意图
2 图像预处理
对图像进行预处理,能够消除图像干扰信息,进而有效地进行图像特征识别。这里的图像预处理主要有滤波和二值化。
2.1 图像滤波
图像采集过程会受到噪声的影响,主要有相机采集时的外部噪声、CCD相机本身的噪声、采集卡的噪声和传输数据线的噪声等[1]。这些噪声使图像出现伪特征,影响晶体识别。消除噪声的方法是滤波。
中值滤波是常用的非线性滤波方法,也是图像处理技术中最常用的预处理技术。它在平滑脉冲噪声方面非常有效,同时它可以保护图像尖锐的边缘。噪声大多为像素数较少的孤立点,而图像是由面积较大、像素数较多的小块组成,中值滤波就是基于图像的这个特点的一项技术。中值是图像内各个像素的灰度值按升序排列后,处于序列中间的值。由此可见,当出现脉冲干扰时,使用中值滤波是非常有效的。
由于晶体图像中的边缘信息为主要识别特征,并且图像边缘的灰度有明显阶跃,为了保护边缘特征,本系统采用中值滤波。
2.2 图像二值化
在灰度图像中,表示一个目标物体的最简单方法就是二值化。在二值图像中,用1表示目标点,其他点就是0。
适当地控制周围环境,使物体轮廓能够用来识别该物体时,用二值化是非常有效的。选用合适的照明和背景时,物体可以很容易从背景中分离,从而得到较好的轮廓。系统输入一副灰度图像后,首先用阈值法将图像变成二值图,阈值的选择随照明条件及物体的反射性不同而有所变化。
为了方便后续晶体图像识别,需要对中值滤波后的图像做二值化处理。二值化图像中的像素点只有两个值:0或255,通过适当的阈值选取,可以获得能够反映图像明显特征的图像,这样整幅图即为明显的黑白效果。经过中值滤波的图像,去除了大部分噪声点,经过二值化处理,可以得到易于识别的晶体图像。
3 晶圆识别对准
蓝宝石晶圆识别主要包括两部分,即晶圆外边缘识别和晶圆内街区识别。
3.1 晶圆外边缘识别
划切机中使用的晶圆材料有两种,即整片和残片,整片是一个完整的圆,残片则是不规则形状的晶片。对于不同的材料,我们采用不同的算法实现。
3.1.1 整片的快速测量法
对二值化分割后的图像进行水平方向和垂直方向的投影,如图2所示,使圆的二维数据在保持精度的前提下,简化为一维投影数据,大大提高了算法速度。对两个一维数据进行遍历,分别获得两个峰值即为所测晶圆的x方向直径和y方向直径,记录得到峰值的变量序列号即为晶圆的圆心。利用圆心和直径可以计算出晶圆的外缘各个点的坐标。
如图3所示的整圆,计算得到圆心坐标为370,289,直径为535。通过计算得到外边缘部分点坐标如表1所示。
3.1.2 残片的边缘检测法
边缘提取首先检测出图像局部特性的不连续性,然后再将这些不连续的边缘像素连成完备的边界。边缘的特性是沿边缘走向的像素变化平缓,而垂直于边缘方向的像素变化剧烈。所以,提取边缘的算法就是检出符合边缘特性的边缘像素的数学算子[2]。
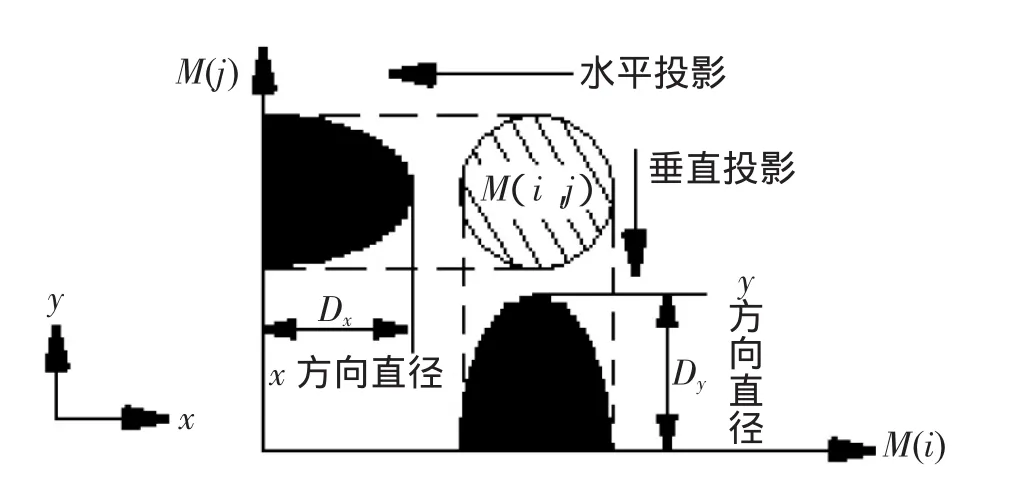
图2 圆的快速测量示意图
图3 整圆二值图
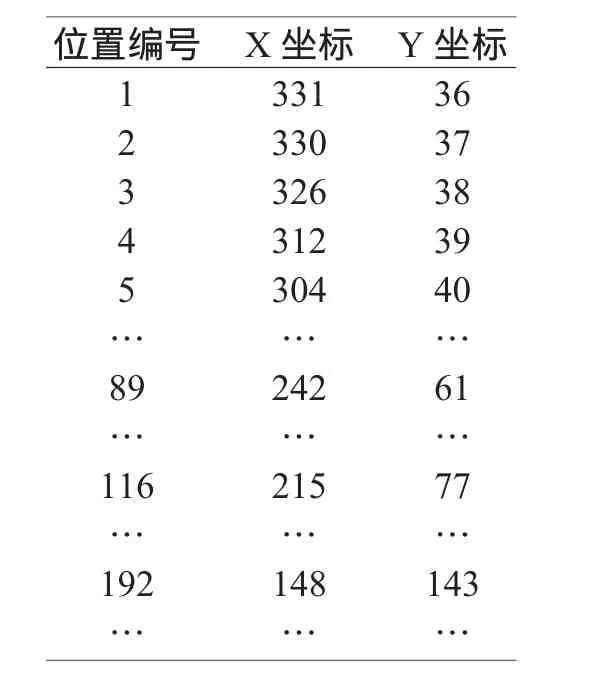
表 1 整圆外缘点坐标
边缘检测算子检查每个像素的邻域并对灰度变化率进行量化,也包括方向的确定。
首先计算图像数据的xy方向导数,这里的图像数据是经过预处理。图像数据用D[i,j]表示,其x 和 y 方向的偏导数阵列分别为 F[i,j]和 G[i,j],于是:


这里有很多种方法可以使用,大都是基于方向导数模板求卷积的方法。经过试验,从实际处理效果来看,用Roberts算子较好。该算法的算子为:

其中,H[i,j]为处理后(i,j)点的灰度值,f[i,j]为处理前该点的灰度值。
使用Robert算子进行卷积运算,得到图像数据中各点的方向导数,来获取其梯度:

计算式4、5分别表示图像中任意一个点的梯度值和方向。利用这两个值,我们来解决下面一个问题:如何在与边缘垂直的方向上求出局部最大值。这里采用比较法,确定一个中心点,将它的梯度值与其梯度线方向的两个相邻点相比较,若其值大则保留,否则置零。
经过局部最大值处理,可以得到细化的边缘图。但这样的图像中还可能包含噪声引起的对单个边缘的虚假响应问题。若降低阈值,又会出现错误的“边缘”。解决这个问题,可采用一种双阈值方法。高、低阈值的确定要根据对信噪比的估计。高阈值可通过直方图的统计结果得到,低阈值经试验确定为高阈值的1/2左右。大于高阈值的响应确定为边缘,小于低阈值的响应删除。在二者之间的,检测该点的8个相邻点是否存在大于高阈值的点,若有则可连接该边缘点。整个边缘检测过程图4。

图4 边缘检测流程图
图5为经过边缘检测的残片图。
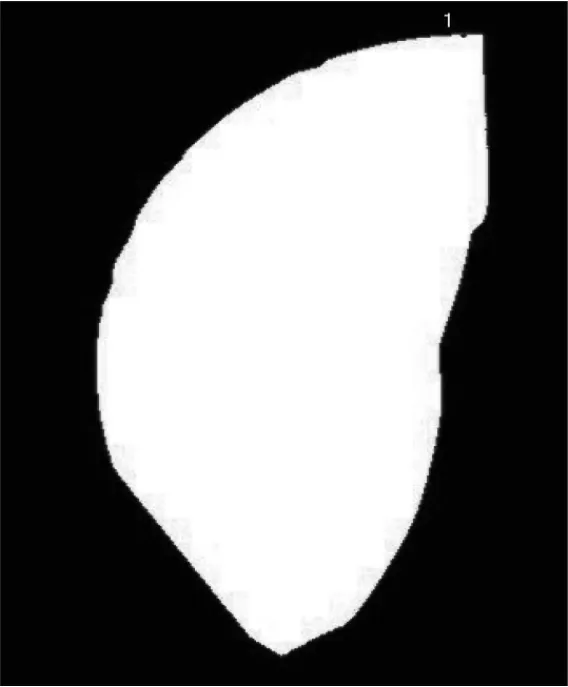
图5 残片的边缘检测效果图
3.2 晶圆内街区识别
通过图像识别,得到晶圆内的街区位置和角度信息,来矫正晶圆内街区与工作台上划切道的偏差。这里采用模板匹配方法实现。模板匹配就是拿已知的模板,和目标图像中相同大小的区域做比较。用平方误差之和来衡量原图(模板)和目标图像区域的差别。设模板的大小为m×n,图像大小为 Wid×Hgh。模板中某点坐标是(x0,y0),该点灰度是U(x0,y);目标图像中的相应点坐标是(X0-x0,Y0-y0),该点灰度是V(X0-x0,Y0-y0)。则使用一次匹配算法为:

全部图像区域匹配完成后,得到的最小值即为结果。
采集得到工作台上的晶圆图像数据,通常在图像中的街区与X轴之间会有一个夹角θ,为了减小计算量,我们在工作台上料位置将边角偏差角度范围做了一定限制。如图6所示。
我们预先在系统中保存一个标准晶粒模板,应用模板匹配方法,在目标图像中搜索,记录下匹配到的目标位置数据,通过计算得到晶圆内部街区与X轴之间的夹角θ,并进行街区对准。晶圆街区对准流程如图7所示。
为了保证划切的准确性,我们有时会进行二次对准,或验证矫正效果。如图8所示,即为进行一次对准后再识别的效果。

图6 偏差角度范围示意图
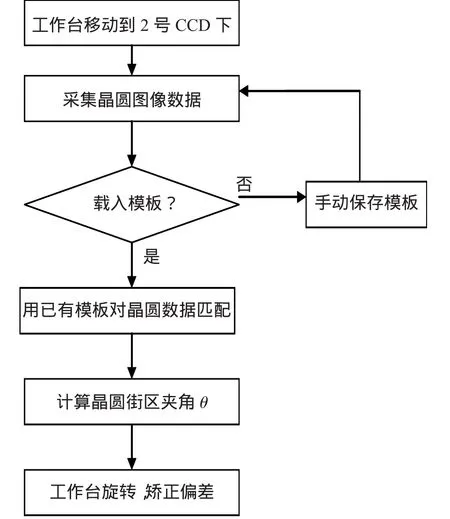
图7 晶圆街区对准流程

图8 晶圆内街区的识别效果图
4 结 论
本文提出的基于图像识别的蓝宝石晶片自动识别方法,应用于划切加工设备,能够满足设备的高精度要求。自动识别对准技术,必然会越来越多的在半导体专用设备中应用,这里也可为其它自动对准的设备研究提供一些参考。
:
[1]Milan Sonka Vaclav Hlavac Roger Boyle著,艾海舟,武勃译.图像处理、分析与机器视觉[M].北京:人民邮电出版社,2003.
[2]王郑耀.数字图像的边缘检测[M].西安:西安交通大学,2003.
[3]刘骏.数字图像处理高级应用[M].北京:科学出版社,2003.
Wafer's Image Identification in incision Machining
MENG Xianjun,ZHANG Wenbin
(The 45thResearch Institute of CECT,Beijing 100176)
Abstract:Be aim to the request of the consumers about automatically ororientation and incision on the LED sapphire wafer,this article discuss an image ororientation method based on edge abstracting and pattern matching.
Keywords:Incision machine;Image identification;Ororientation;Wafer
TN305.1
B
1004-4507(2013)07-0032-05
2013-04-06
孟宪俊(1980-),女,毕业于电子科技大学,现从事半导体设备软件开发及图像处理方面的工作
张文斌(1985-),男,毕业于西北工业大学,现从事半导体设备的开发与研制工作。
猜你喜欢
科学与信息化(2024年3期)2024-02-20 01:12:38
科学与信息化(2023年1期)2023-01-31 08:11:46
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
当代陕西(2018年12期)2018-08-04 05:49:20
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
通信电源技术(2016年5期)2016-03-22 01:10:14
探测与控制学报(2015年4期)2015-12-15 15:01:00