
基于SIMULINK 的直流调速自动控制系统的仿真实验
2013-09-17 02:00彭燕
渭南师范学院学报 2013年2期
彭 燕
(渭南师范学院物理与电气工程学院,陕西渭南714000)
直流调速系统是电力拖动课程[1]的重要内容,系统实验在教学中占有举足轻重的作用.由于实验课学时不足、实验设备台数有限及实验危险系数较高等原因,致使学生动手机会减少,实验台使用时间较长存在老化、连线接触不良等问题,使实验结果与理论知识不符或存在较大差异.因此,将工具软件应用到该课程实验教学中就成为重要内容.
随着仿真技术的发展,MATLAB作为强大的数学处理软件,逐步渗透到各个领域,使以传递函数为基础的SIMULINK环境成为计算机仿真的重要工具.本文应用SIMULINK组件中的电力系统工具箱(Sim-PowerSystems)进行直流调速系统仿真[2-3]实验设计,使学生通过仿真能够更好地理解和掌握直流调速自动控制系统的结构和设计方法,提高学生对电力拖动课程的兴趣.
1 直流电动机的调速方法
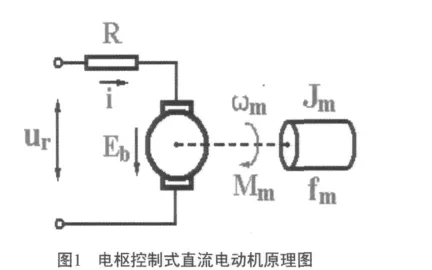
直流电机具有良好的启动、制动性能,宜于在宽广范围内平滑调速,是电力拖动系统的主要执行元件.电枢控制式直流电动机的原理图见图1.

分析图1可得,直流电动机转速与电动机其他参数的关系为其中:n为电动机转速(r/min),U为电枢电压(V),Ia为电枢电流(A),Ra为电枢回路总电阻,Ke为电动机的电动势常数,Φ为励磁磁通(Wb).
由式(1)可知,直流电动机调速方法有三种:一是改变电枢电压调速;二是改变励磁磁通;三是改变接于电枢回路中的附加电阻.第三种调速方法损耗较大,机械特性软,故很少使用.实际中常用的调速方法有两种:一是用晶闸管构成可控整流器向电动机供电,称为晶闸管—电动机调速系统,简称V—M直流调速系统,目前国内使用最广泛;二是采用直流斩波器或脉宽调制变换器实现调速.在本次实验仿真研究中,选择对方法一进行研究.
2 直流调速系统仿真实验
2.1 V—M开环调速系统
图2中VT是晶闸管可控整流器,通过调节触发装置GT的控制电压Ur来移动触发脉冲的相位,即可改变平均整流电压Ud,从而实现平滑调速.L是平波电抗器,限制电流脉动并使电枢电流连续.
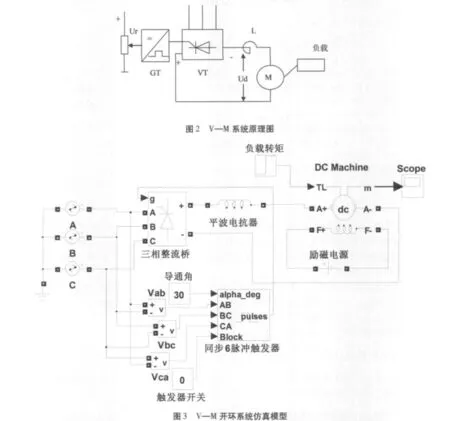
采用SIMULINK中的SimPowerSystems工具箱中的模块对开环系统仿真,取晶闸管整流桥Universal Bridge作为三相整流桥电路VT,取同步6脉冲Synchronized 6-Pulse Generator模块作为同步脉冲触发器GT,三个AC Voltage Source模块组成三相对称电源,仿真模型见图3.仿真模型建立后,需要进行仿真参数设置,仿真算法选择ode23tb,算法的选择可以通过仿真实践进行比较确定,在调速系统中,仿真算法较多采用ode23tb.仿真时间根据需要设定,本次仿真Start为0,Stop为5 s.仿真结果通过Scope模块或OUT来显示,本实验采用Scope.
当模型和参数设置好后,点击Start命令系统开始仿真,仿真结果通过Scope显示窗口输出,从仿真结果看,转速很快上升,当有扰动出现时,由于开环无法起调节作用,转速下降不会回到原来的恒值.
2.2 V—M单闭环无静差转速负反馈调速系统
由于开环系统受到外部扰动时,不能通过自身调节恢复原来的平衡状态,需要对系统做进一步改进.单闭环速度负反馈调速系统通过反馈调节能够实现速度恒定,当有外部扰动出现时由于负反馈存在,使速度可靠调节恢复到原来恒定值.与开环V—M系统比较增加了速度闭环控制,增加了测速装置、速度比较器及速度调节器[4].转速负反馈调速系统SIMULINK模型由给定信号、速度调节器、同步脉冲触发器、三相整流桥、平波电抗器、直流电动机、速度反馈等环节组成,仿真模型见图4.仿真结果可以表明单闭环无静差调速系统能够很好地实现自动控制系统任务,系统在3 s处输入转矩从50跃变到100时,PI调节器根据其自身的调节参数能够很快地将转速恢复成原始恒定值,扰动对系统的影响时间较短,系统能够很快恢复稳定.
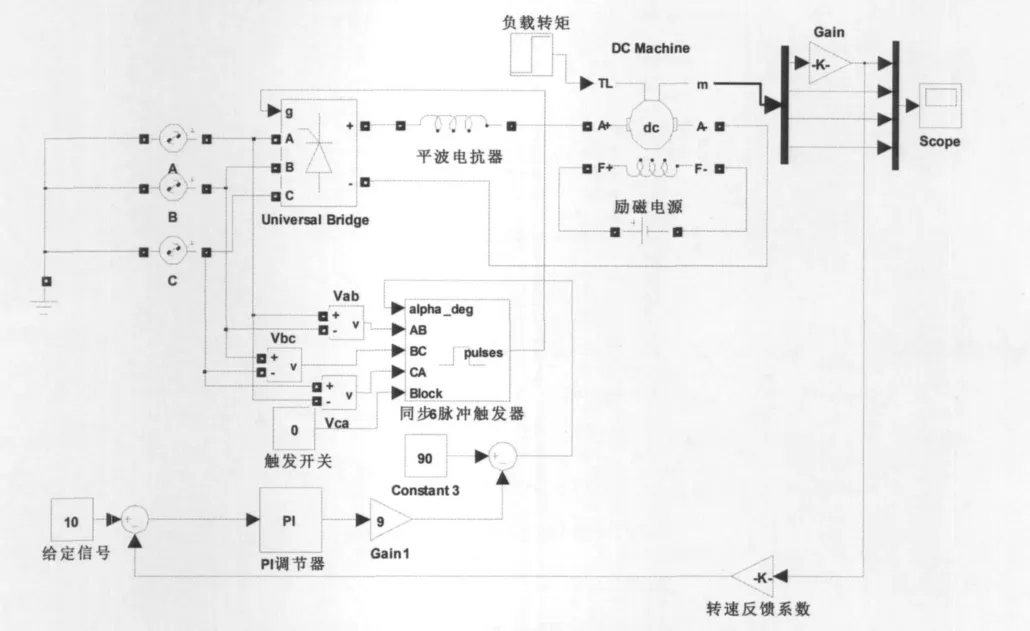
图4 单闭环无静差速度负反馈系统仿真模型
2.3 转速、电流双闭环直流调速系统
采用PI调节器的转速负反馈直流调速系统可以保证在系统稳定的前提下实现转速无静差.但是如果系统对动态性能要求较高,单闭环系统就难以实现.转速、电流双闭环调节系统设置转速调节器ASR和电流调节器ACR[5]分别对转速和电流进行调节,二者之间实行嵌套(或称串级)连接,能够有效地改进系统的动态性能.系统中还包括电流滤波、转速滤波和两个控制环给定信号的滤波环节,这主要是因为电流检测信号中常含有交流分量需要低通滤波器,转速反馈信号中含有电动机的换向波纹也需要滤波器.为给定信号通道加入一个时间常数与滤波环节相同的惯性环节,让给定信号与反馈信号经过同样的延滞,使二者时间上配合.仿真模型见图5,根据工程上参数设定方法对控制系统中各参数进行定量设置.仿真时,当给定信号为10 V时,在电流调节器作用下电动机电枢电流实现最大值,使电动机以最优时间准则开始上升,在大约0.25 s左右时转速超调,电流很快下降,在1.7 s时达到稳定,稳定转速为1000 r/min.
3 结语
仿真的实质是采用软件手段来验证实际电力拖动系统的预期结果,三个仿真实验证明直流开环、单闭环无静差和双闭环系统能够按照理论要求完成直流平滑调速,防止干扰和快速启动的目的.通过实验及结果对比,使学生能够理解并控制系统各个环节及调节器的作用,培养学生利用理论知识设计实际系统的能力,避免由于实验条件和接线问题带来的实验结果与理论相差较远的现象,以此来加强学生对控制系统理论及电力拖动理论的理解,提高学生学习兴趣.
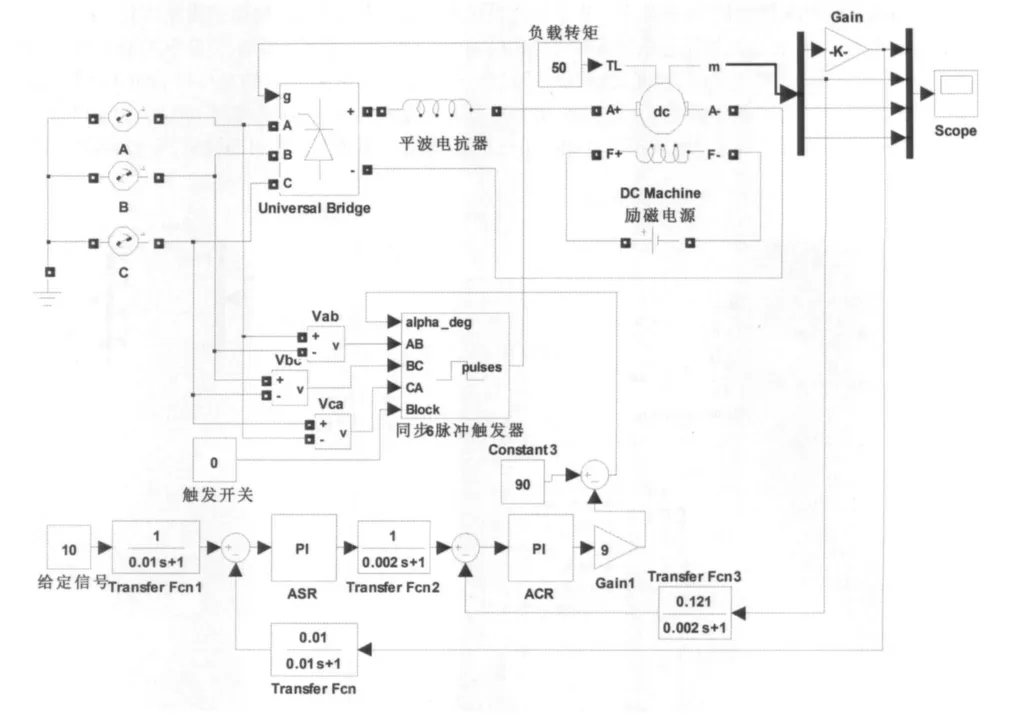
图5 双闭环直流调速系统仿真模型
[1]陈伯时.电力拖动自动控制系统:运动控制系统[M].第3版.北京:机械工业出版社,2007.
[2]顾春雷,陈中.电力拖动自动控制系统与MATLAB仿真[M].北京:清华大学出版社,2011.
[3]周志刚,敖章洪.基于MATLAB/SIMULINK的电力电子实验仿真[J].赤峰学院学报(自然科学版),2011,27(9):204-205.
[4]钮王杰,张斌超,刘春艳.基于MATLAB/SIMULINK转速闭环直流调速控制系统的仿真研究[J].大同大学学报(自然科学版),2011,27(5):33 -36.
[5]万里光.基于MATLAB的双闭环直流电机调速系统的仿真[J].船电技术,2011,31(2):30-32.
猜你喜欢
弹道学报(2022年3期)2022-10-08
电气电子教学学报(2022年3期)2022-07-30
火力与指挥控制(2022年5期)2022-07-25
燃料化学学报(2022年5期)2022-05-30
四川大学学报(自然科学版)(2021年1期)2021-01-26
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
电子制作(2019年23期)2019-02-23
现代计算机(2017年4期)2017-03-29
电气电子教学学报(2016年5期)2016-03-03
