
基于SimMechanics的平面二自由度并联机构运动学与动力学仿真*
2013-09-12 09:10张宁宁张彦斐宫金良
组合机床与自动化加工技术 2013年8期
张宁宁,张彦斐,宫金良
(山东理工大学机械工程学院,山东淄博 255049)
0 引言
并联机构能够实现高速、高精度运动,具有较高的平均刚度,较低的惯性,相比串联机构具有较高重载特性等优点[1]。近年来该领域受到众多研究人员的青睐,其中运动学、动力学分析十分重要,很多学者也提出了多种方法研究动力学特性,并建立了运动学与动力学方程。由于并联机构的复杂性,有时其运动学与动力学方程的建立非常困难,并且计算量大,推导复杂等缺点,这就迫切需要一种高效的方法来提高研究者的工作效率。MATLAB/SimMechanics建模是一种新型的计算机建模仿真方法[2-5],它无需建立数学模型和编程,可对机构进行实时分析,便于调整仿真参数。本文以2-PPr平面并联机构为例,研究SimMechanics的运动仿真方法。
1 2-PPr机构描述
图1为2-PPr并联机构简图,它由与机架相连的导轨、动平台和两个对称布置的支链组成。两个滑块分别由两个伺服电机驱动,沿导轨做竖直移动,平行四边形铰链Pr绕移动副P转动。根据对机构结构形式的分析,可以得出机构有两个平面移动自由度。给定机构尺寸为2R=540mm,2r=120mm,l1=l2=350mm,两滑块初始坐标(-270,800,0)和(270,800,0),动平台中心位置为(0,520,0)。
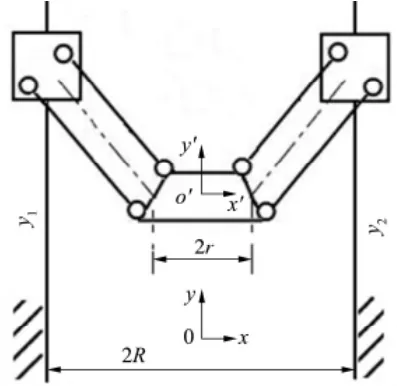
图1 2-PPr机构简图
2 SimMechanics仿真分析
2.1 基于SimMechanics的运动学分析
SimMechanics是 Simulink 的子模块[6],可以对多种运动副连接的刚体模型进行建模与仿真,实现对机构系统进行分析与设计的目的[7-8]。SimMechanics主要包括刚体模块组(Bodies),运动铰模块组(Joints),约束与驱动模块组(constraints&drivers),传感器和动作器模块组(sensors&actuators),力单元模块组(force elements),辅助工具模块组(utilities),演示模块组(demos)[9]。根据2-PPr并联机构的连接特点建立SimMechanics的仿真模型如图2~图4所示。
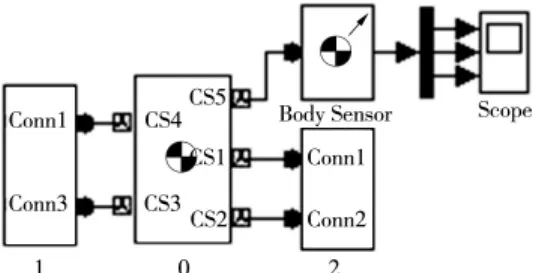
图2 2-PPr并联机构的SimMechanics模型
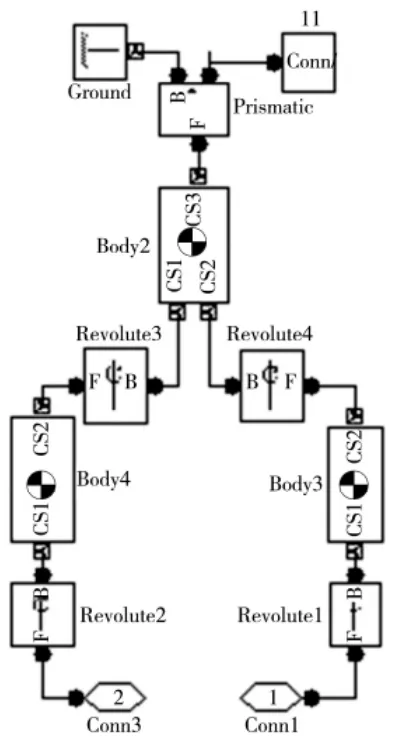
图3 单支链的SimMechanics框图
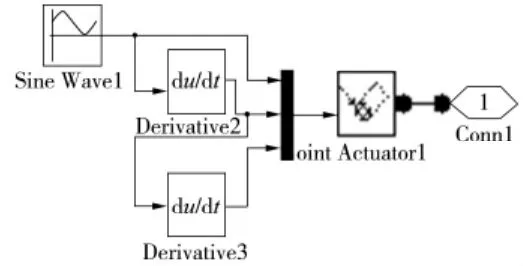
图4 驱动器的SimMechanics框图
图2为2-PPr并联机构的SimMechanics总体模型,由固定平台、两条分支链和动平台组成。图3为其中一条单支链的SimMechanics模型,由一个移动副、四个转动副和两个杆件组成,移动副上安装有驱动器。各杆件根据其结构尺寸确定内置参数,并在移动副模块Prismatic和转动副Revolute中的Axes面板中设置驱动轴和转动轴。图4为驱动器的SimMechanics模型,可以设置机构的输入运动或力。
给定机构主动副输入运动方程:y1=300 sin(0.3t)+30,y2=300sin(0.3t)+20。对机构进行仿真,输出值为动平台中心点的位置随时间的变化函数,同时可以输出动平台的速度和加速度随时间的变化曲线,如图5所示。

图5 动平台的位置、速度、加速度曲线
2.2 基于SimMechanics的动力学分析
机构动力学[10]主要研究两个基本问题:一是已知运动副或是机构上的作用力(力矩),求解各构件的位移、速度等运动参数;二是已知机构的运动参数,求解所需的驱动力(力矩)。对于2-PPr并联机构,已知各关节的作用力,求各关节的位移、速度、加速度,为动力学正问题。反之,已知动平台运动轨迹、速度和加速度,求解所需的驱动力,则为2-PPr的动力学逆问题。基于SimMechanics的动力学仿真,不需建立动力学方程,只根据机构的组成,利用Sim-Mechanics的模块集建立2-PPr并联机构的动力学仿真模型,且机构的动力学正、逆问题仿真模型区别很小,只需作稍微变动,就可以完成就可以完成2-PPr并联机构的动力学仿真。
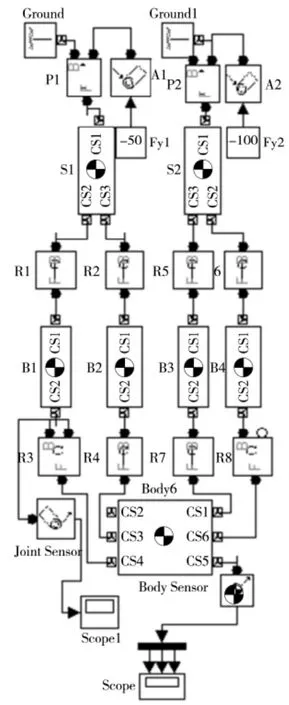
图6 机构的动力学模型
2-PPr并联机构的SimMechanics仿真模型如图7所示,对两个移动副分别施加力 F1=50N,F2=100N,动平台施加力F3=20N,进行仿真后,得到2-PPr并联机构的转动副R3和R8的转角曲线,动平台速度、加速度曲线分别如图7和图8所示。

图7 转动副R3、R8的转角曲线
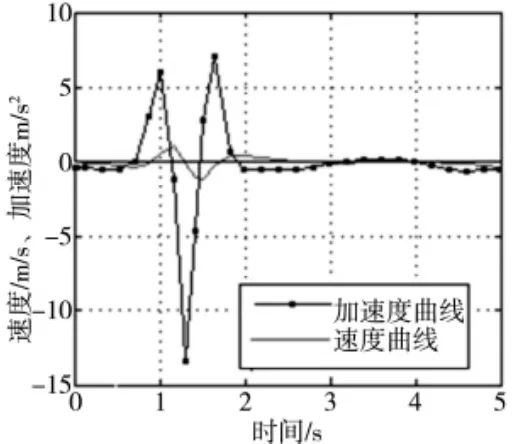
图8 动平台速度、加速度曲线
2.3 仿真结果分析
由前面所得仿真结果可知,分别给定两滑块的运动方程y1=300sin(0.3t)+30、y2=300sin(0.3t)+20后,动平台向下运动,当达到最低点y=180mm后又向上运动,符合给定的输入运动规律。同样,也可以给定输出端的运动要求,求解所需的输入运动。当给定两滑块不同的作用力F1=50N、F2=100N时,机构向下运动,转动副R3出现了(-140°~30°)的变化范围,而转动副R8的变化范围为(-30°~140°),两转动副转动方向相反,转动角度的取值范围也受机构参数的影响,如R、l1、l2取值的大小,为机构参数的选取提供依据;动平台产生1.1m/s~1.1m/s的速度变化范围,相应加速度变化范围 13 m/s-2~8m/s-2,在 1 ~2s时,速度加速度变化频率增大,此时动平台产生振动,机构的动力学仿真分析为后续的模态分析和机床动态精度的研究提供了理论途径。
3 结论
为了对2-PPr并联机构的运动学与动力学进行分析,在SimMechanics环境下对机构进行建模与仿真,获得了机构的各种关系曲线。验证了SimMechanics进行机构建模与仿真的快速有效,本文所得结论也为后续机构的控制提供了良好的理论依据。
[1]KEMAL S,KORKMAZ O.Trajectory tracking control of parallel robots in the presence of joint drive flexibility[J].Journal of Sound and Vibration,2009,319:77-90.
[2]Misagh Mansouri,Jeffrey A.Reinbolt.A platform for dynamic simulation and control of movement based on Open-Sim and MATLAB[J].Journal of Biomechanics,2012,45:1517-1521.
[3]陈修龙,赵永生.并联机床运动仿真与运动学分析的新方法[J].中国机械工程,2006,17(5):467-471.
[4]马大勇,仝崇楼,龚小平,等.基于SimMechanics摆式输送机构运动仿真与分析[J].组合机床与自动化加工技术,2006(11):42-44.
[5]王英波,黄其涛,郑书涛,等.Simulink和 SimMechanics环境下并联机器人动力学建模与分析[J].哈尔滨工程大学学报,2012,33(1):100 -105.
[6]孙坚,丁永生,郝矿荣.基于SimMechanics的新型并联机构仿真平台[J].计算机仿真,2010,27(1):181-184.
[7]陈建明,梁德成.基于Simulink的机构运动仿真[J].组合机床与自动化加工技术,2005(8):85-88.
[8]庞和喜,曹鸿钧.基于SimMechanics和iSIG-HT的平面四杆机构的运动仿真和优化[J].机械传动,2008,32(4):46-56.
[9]姚俊,马松辉.Simulink建模与仿真[M].西安:西安电子科技大学出版社,2002.
[10]刘善增.平面二自由度并联机器人的动力学设计[J].机械科学与技术,2008,27(2):230 -233.
猜你喜欢
当代水产(2022年6期)2022-06-29
中学生数理化·中考版(2021年10期)2021-11-22
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
电子制作(2019年23期)2019-02-23
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
消费导刊(2018年8期)2018-05-25
燕山大学学报(2015年4期)2015-12-25
