
波浪滑翔器原理和总体设计
2013-09-12 07:50:28李小涛吴小涛佘湖清
兵器装备工程学报 2013年12期
李小涛,王 理,吴小涛,佘湖清
(中船重工集团公司第七一○研究所,湖北 宜昌 443003)
我国拥有广阔的“海洋国土”和漫长的海岸线,海洋维系着中华民族崛起的诸多重大安全和发展利益问题,面临着海洋权益维护、海洋开发和管理等严峻形势[1]。与周边国家岛礁主权争端、以及争议海域的资源勘探等,急需观测、获取翔实的海洋环境资料。海洋的开发和利用都离不开海洋观测等一系列基础工作,需认知海洋空间、了解海洋现象、寻求反映机理、探讨演变过程、发现海洋秘密、总结海洋规律等逐步做起[2]。波浪滑翔器是一种新型的海洋观测平台,理论创新性强,在军事和民用两方面都有着非常重要的研究和使用价值。
1 波浪滑翔器
波浪滑翔器是近几年来发展起来的新型海洋观测平台,它兼具传统水面定点浮标可以观测海平面上气象要素、有动力AUV可以按照规划航路进行机动观测、以及无动力水下滑翔器大范围探测的优点,创新性地以波浪能为主驱动力,辅以太阳能充电系统作为传感器、通信和控制系统的电能来源,续航能力达到前所未有的高度。波浪滑翔器具备自主航行控制、数据实时传递、使用灵活、可遥控等功能,可实现对敏感区域、重点海域或特殊时期的海洋环境观测、巡逻。
1.1 总体结构
波浪滑翔器总体上分为水面浮体、滑翔体和链接挂缆三大部分。水面浮体由太阳能电池板、浮体材料包围的密封舱体、控制系统、电池BD、各类传感器负载以及可充电电池等组成;滑翔体包括可转动的翼板、翼板支撑框架及舵机组成,如图1。

图1 波浪滑翔器总体结构
1.2 运动机理
波浪滑翔器的水面浮体成正浮力,漂浮在水面,随波起伏;滑翔体成负浮力,由伸缩性很小的柔性挂缆与浮体连接;波浪滑翔器整体成正浮力。由于挂缆不具伸缩性和滑翔体是负浮力,因此当浮体随波浪下沿下落时,滑翔体随之下潜,此时翼板受到重力和垂直于翼板的水作用力,此两个力产生一个前向的分力,该分力即驱使滑翔体向前运动。当浮体随波浪上升沿上升时,挂缆拉动滑翔体随之上升,此时翼板主要受到挂缆拉力和垂直于翼板的水作用力,此两个力同样产生一个前向的分力,该分力驱使滑翔体向前运动。如图2所示。

图2 滑翔翼上升和下降时受力分析
因此,只要有波浪带动水面浮体上升和下降,水下的滑翔体就会向前运动,从而带动浮体也向前运动。另外,滑翔体上带有舵板,可以控制波浪滑翔器前进的方向,并且该方向和波浪的方向无关。
2 波浪滑翔器测量优势
目前,海洋观测的主要手段有现场直接测量、数值模拟和卫星遥感。由于数值模拟和卫星遥感估算的海洋物理效应数据与真实情况误差较大。因此,现场直接测量方法更受关注。船只观测付出的人力、物力、财力巨大,出航又受到天气和海况的限制,续航能力有限,测量成本高,取得的数据无论是在空间的广度和时间的频度上都受到极大限制。浮标和潜标观测系统在获取海洋数据的适时变化性方面比船只观测有优势,但只能定点观测,而且锚泊布阵受成本限制一般较稀疏,而不能真实地反应海洋数据在空间上的变化性。另外,大部分潜标测量的水文数据不能实时地传递到岸站,只能周期性的回收数据,测量数据不能进行实时分析。水下滑翔机等运动测量平台能比较好的弥补上述平台的不足,可在水下大范围机动,获取一定深度的剖面数据,但鉴于总体尺寸与能量的局限,其扩展能力和续航力受到制约,并且无法观测海平面气压、风速、风向以及波浪等要素。
波浪滑翔器具有强大而灵活的传感器搭载能力,可探测多种水文、气象、声以及化学等要素。波浪滑翔器的水面浮体具有海面、海表传感器搭载能力,通过安装不同类型的传感器,可实现对风速、风向、温度、湿度、气压等水气象数据观测,水面浮体和水下滑翔体搭载的传感器可实现温度、盐度、流场、浪高等海表、水下水文数据的测量。另外,根据用户需求,还可以搭载特殊传感器,实现对指定要素的探测,例如实现对微生物、CO2、pH值等的测量,以及实现对水声的记录等。
相对于潜标、剖面浮标等海洋观测装置不能完全实时传递数据,波浪滑翔机可以实现严格意义上的数据实时传输。配合对数据的及时处理,可提供更为精确的预报。另外,通过搭载水声通信机,波浪滑翔器还可转发水下观测装置的数据到岸站,同时给水下观测装置发送岸站指令,成为水下设施、装备与岸站沟通的桥梁。
3 波浪滑翔器的用途
波浪滑翔器为解决目前海洋观测面临的范围广、时间长、时效性差、成本高等难题提供了一种可行的技术手段,将在以下几个领域发挥显著作用。
3.1 海洋动力环境研究
众所周知,海洋动力环境变化对全球气候起着决定性的影响。深入了解海洋动力环境变化规律,建立预测模型,是全球海洋环境科学家长期以来研究的课题,目前的研究成果距离完全掌握海洋动力环境变化规律、准确预报发展趋势的目标还有很大的差距。海洋动力环境研究的基础工程之一就是通过布放大量的观测装置获取大范围、长时间的水文气象要素。目前,包括我国在内的很多国家及国际组织在不同海域布放了大量的浮标、潜标及水下滑翔机用于获取海洋水文数据。
波浪滑翔器与浮标、潜标以及水下滑翔机等观测装置相比,在海洋动力环境观测研究方面具备一定的优势。波浪滑翔器能按照规划路径,实现长距离、大范围机动测量,也能实现虚拟锚泊定点测量;具有多界面测量能力,既可测量水下和水面要素,也可对水上气象要素进行测量;且对测量得到数据能够实时的传到岸站进行分析。因此,将在海洋动力环境观测方面大量应用。
波浪滑翔器具有较强的通信能力,能很方便的与浮标、潜标以及水下滑翔机进行组网,从而大大提高海洋动力环境探测效率和实时性。
3.2 海洋环境保护
沿海区域的水质变化,不仅对沿海居民的生活有极大影响,对沿海渔业养殖也影响极大。近年来,我国沿海海洋经济快速发展,海洋环境保护形势日益严峻。渤海湾“康菲”漏油及青岛海域藻类泛滥等事件都导致了相关海域的生态灾难。
以波浪滑翔器为基础的海洋环境观测系统能为海洋环境保护提供日常监测、事前预警以及事态监控。在美国,波浪滑翔器已经用于在BP公司发生墨西哥湾石油泄露后的不间断水质检测,利用波浪滑翔器在石油钻井平台周围巡游,实时监测漏油情况。
3.3 海洋安全和维权
1994年《联合国海洋法公约》生效,使地球表面积35.8%的海洋成为沿海国家的管辖区,管辖海区的“国土化”及控制权对海洋国家的命运具有重大影响。争夺海洋国土、海洋资源和海洋通道的斗争交织,形成一系列的海洋斗争焦点。目前,世界范围内有370多处海域存在划界纠纷,近1000个岛礁存在归属争议,尤以我国的海洋安全和权益维护问题更为突出。
通过波浪滑翔器搭载相应的传感器,可实现对敏感海域进行无人、长时间的机动探测和调查,获取信息并实时传递到岸站,这将为我国海洋安全和权益保护提供强有力的支撑。
4 总体参数设计
Airy波理论比较清晰地描述了波动特性,且便于应用,是研究复杂波浪、不规则波理论的基础。为了研究方便,我们将问题简化,取二维小振幅推进波作为波浪滑翔艇的设计依据。其特点:水面呈现简谐形式的起伏,水质点以固定的圆频率作简谐振动,波形以一定的速度向前传播,波浪中线与静水面重合[3],如图3所示。
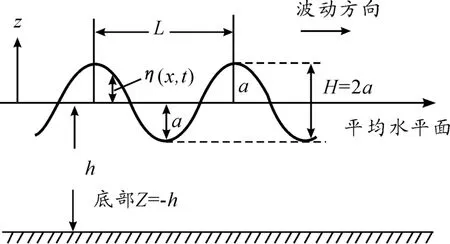
图3 波浪参数
单个波长余弦波的势能为EK=1/4ρga2L,则深水波中水下某深度水质点作圆周轨迹运动r=aekz,其位置处的单位波长势能为ER=1/4ρgr2L[4]。两处位置的势能差为

由式(1)可以看出:两位置处的势能差与波面振幅的平方成正比,与波数K成反比,与水深z数值上成正比。因此,只要水质点水下振幅小于水面振幅,水面质点和水下质点之间形成势能差,波浪滑翔器就能利用该势能差,并将其转化为前进动力。
4.1 水面浮体的波浪能转换分析
根据Airy波理论,以6 m挂缆长度为例,可计算出不同浪级时单位宽度、单位长度内的波势能差,这些能量传递给波浪滑翔器。根据能量守恒定律,波浪滑翔器向前运动所需能量应该与从波浪中获得的能量相等,由此可以估算出波浪滑翔器在不同浪级下可能达到的航速。
为了有效利用波浪能,并避免发生跨浪现象而影响波能的利用率,水面浮体长度应该小于1/4波长为好。海浪的统计数据表明,一级涌浪波长为10 m左右,波浪滑翔器以该波浪为设计目标环境,考虑到其他设备限制,取水面浮体长2.4 m,宽0.6 m。
水面浮体长2.4 m,艇宽0.6 m,上下挂缆长度6 m,则水面浮体收到的波能EE=1.44EC,即理论上水面浮体吸收到的波能为单位余弦波势能差乘以水面浮体长宽。假设水面浮体吸收的波能只有10%能有效转换滑翔动能,则EK=10%EE=1/2MV2,因此可以计算出波浪滑翔器在相应海况下的理论航行速度不同涌浪等级的波浪特性如表1、表2所示。

表1 不同涌浪等级的波浪特性

表2 不同涌浪等级的波浪特性
4.2 滑翔翼受力分析
由波浪滑翔器的运动机理分析得,当波浪滑翔器由波谷向波峰爬升时,由于滑翔器的重力和向上提升时的阻力,波浪滑翔器的吃水会增加。增加吃水部分的浮力用于克服水下悬挂部分向上运动的阻力。阻力的大小与向上运动速度的平方成正比。如果水面浮体提供的浮力瞬间不足以克服向上运动的阻力,则水面浮体会出现短暂没入水下一定深度。波浪滑翔器向上的运动速度最终应与波浪水分子的垂向运动速度一致。也就是说,波浪产生的向上拉力等于水分子圆周运动加速度产生的加速度力。据此可以得出不同波浪等级下波浪滑翔器前进方向的分力(图4)。
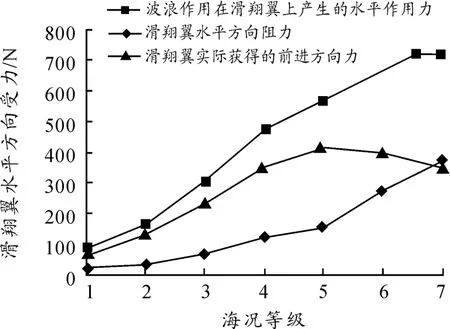
图4 不同海况下滑翔翼的受力分析
由图4得到的滑翔翼水平方向分力就是拖动波浪滑翔器前进的动力。1级浪高时,大概可以得到最大62.4 N的动力,运动过程中需要克服流体阻力和前进方向的风阻力,这个力是以正弦规律在变化,也就是从波谷向波峰爬升时,由零加速到最大,再减速到零。
当波浪滑翔器由波峰向波谷下滑时,水下滑翔体依靠自身重量下沉,按波浪垂直加速度加速下沉。按照目前航行阻力初步计算结果,只要有1级以上的浪,波浪滑翔器的水下滑翔翼产生的滑翔力就能使水面浮体向前航行。波峰和波谷时航速为零,峰谷中间速度最大,所以波浪滑翔器的速度是以锯齿形方式变化。
5 结束语
波浪滑翔器利用波浪表层水质子振动幅度和深层水质子振动幅度的差异而引起的波浪势能,将此势能转化为动能,从而实现其整体运动。波浪滑翔器在中等水深和深水环境下使用,其连接上下部分的挂缆的长度直接影响系统产生的势能。既满足波浪滑翔器足够的运动速度(>0.5 kn),又确保波浪滑翔器的水下滑翔体和水面浮体不会发生运动滞后现象,选取挂缆长度6 m为宜。
本文阐述了波浪滑翔器的运动机理和应用前景,并从理论计算中获取了大致的波浪滑翔器浮体长宽及挂缆长度的选取尺寸,并对该设计下的波浪滑翔器进行了运动分析,从理论上计算了其运动速度范围。
波浪滑翔器是一种创新性的海洋观测平台,通过本文的分析可见,其原理可行。将其进行工程化,必将在海洋观测领域得到广泛应用。
[1]刘美琴,郑源,赵振宙.波浪能利用的发展与前景[J].海洋开发与管理,2011,27(3):80-82.
[2]管轶.我国波浪能开发利用可行性研究[D].北京:中国海洋大学,2011.
[3]WIGGINS S,MANLEY J,BRAGER E,et al.Monitoring marine mammal acoustics using wave glider[M].OCEANS,2010.
[4]金振逸,马少杰.基于线性波浪理论的海上浮动平台受力及运动分析[J].四川兵工学报,2011,32(8):135-137.
[5]Nicholas K,Brian B.Estimation of Wave Glider Dynamics for Precise Positioning[M].MTS,2011:1-8.
猜你喜欢
学苑创造·A版(2024年5期)2024-06-10 21:55:57
人民长江(2023年6期)2023-07-25 12:24:14
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:48
——《势能》
文化纵横(2022年3期)2022-09-07 11:43:18
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:40
中学生数理化·八年级物理人教版(2021年6期)2021-11-22 07:49:52
军民两用技术与产品(2021年7期)2021-10-13 08:12:20
地质装备(2021年2期)2021-04-23 07:33:52
舰船科学技术(2021年12期)2021-03-29 01:28:12
水利与建筑工程学报(2018年4期)2018-08-21 07:47:54
