测向天线展开机构设计
2013-09-11 00:56:46李聪聪
河北省科学院学报 2013年1期
李聪聪
(河北远东通信系统工程有限公司,河北 石家庄 050081)
在无线电导航、电子侦察、电子跟踪和电子对抗等电子系统中,一个很重要的任务是测定目标的方位[1]。为了准确的寻找、跟踪目标需要一种天线实现这个功能,这种天线的波束覆盖要广,能实现这种功能的天线只有测向天。通过几个测向天线可以组成天线阵列,能增大波速的覆盖区域,更准确、快速的寻找、跟踪目标。天线阵列测向天线应用越来越广。作为车载天线由于机动性越来越强,对天线结构的要求也越严格,尤其是天线的尺寸越来越大,对天线的收藏、展开机构的使用就提出了较高的要求。本文将对测向天线展开机构结构分析和设计。
1 展开机构结构分析
测向天线采用五阵源结构形式,天线展开机构主要有固定桁架、多连杆机构、驱动装置、滑块机构、控制系统等组成。驱动装置、滑块机构通过多连杆机构与固定桁架连接而成,通过控制系统来实现天线的收藏、展开。
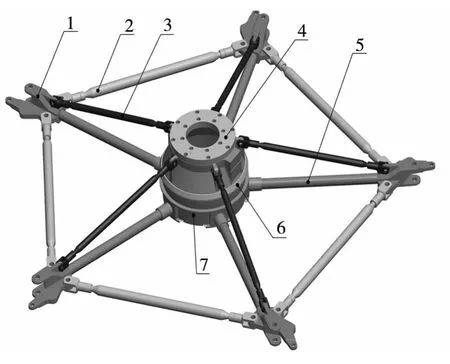
图1 固定桁架结构示意图
1.1 固定桁架
固定桁架由桁架接头、横撑杆、斜拉杆、安装法兰、腹杆、防护圈、中心架等组成。固定桁架作为多连杆机构中的机架,是天线展开机构的基础,通过安装法兰与电动升降杆连接。中心架、桁架接头、腹杆组成是组成多连杆机构机架的最基本元件,形成5 星放射状结构,但此结构为悬臂结构,端部的变形及根部受力大,尤其在行车状态时,问题更为突出。为改善腹杆的受力状态,在中心架与桁架之间增加了斜拉杆,在两桁架接头之间增加了横撑杆,形成可靠的桁架结构,以满足在运载车辆车行进时的强度要求,结构如图1所示。
1.2 多连杆机构
多连杆机构由大齿圈、机架、连杆Ⅰ、曲柄、连杆Ⅱ、滑块、挺杆、振子等组成。电机驱动小齿轮,小齿轮带动大齿圈绕中心架(机架)转动,连杆Ⅰ推动曲柄转动,使阵元展开或收藏,而连杆Ⅱ拉动滑块在曲柄轴上滑动,使得挺杆带动振子展开或收藏。大齿圈均布5个连杆Ⅰ的连接铰点,从而使得电机驱动大齿圈转动时,大齿圈可以同时带动5套相同的多连杆机构使振子展开(收藏)。结构如图2所示。
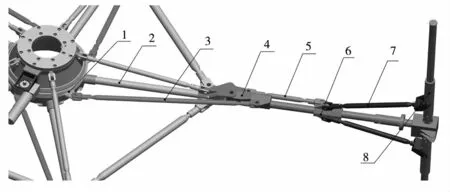
图2 多连杆机构结构示意图
1.3 驱动装置
驱动装置由电机安装支架、大齿圈、小齿轮、电机等组成,通过电机安装架与中心架连接,驱动装置由直流电机提供源动力,经两级减速器带动小齿轮转动,从而驱动大齿圈转动,使之成为曲柄摇杆机构的主动件。结构如图3所示。
1.4 滑块结构
天线要求在室外使用,由于与滑块配合的轴没有防护,长期裸露在外面,轴表面会附着灰尘,结构如果不做相关设计,在使用中摩擦阻力会增大,直至使机构无法正常工作。为此滑块内镶有带沟槽的滑动套,这样落在轴上的灰尘会在滑块运动过程中从沟槽内带出,从而保证滑块可长时间在室外使用。滑块结构如图4所示。
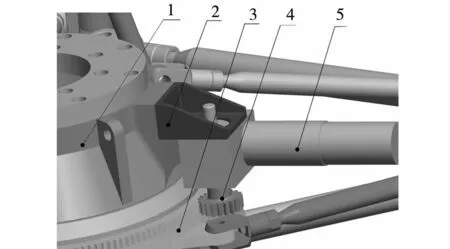
图3 驱动装置结构示意图
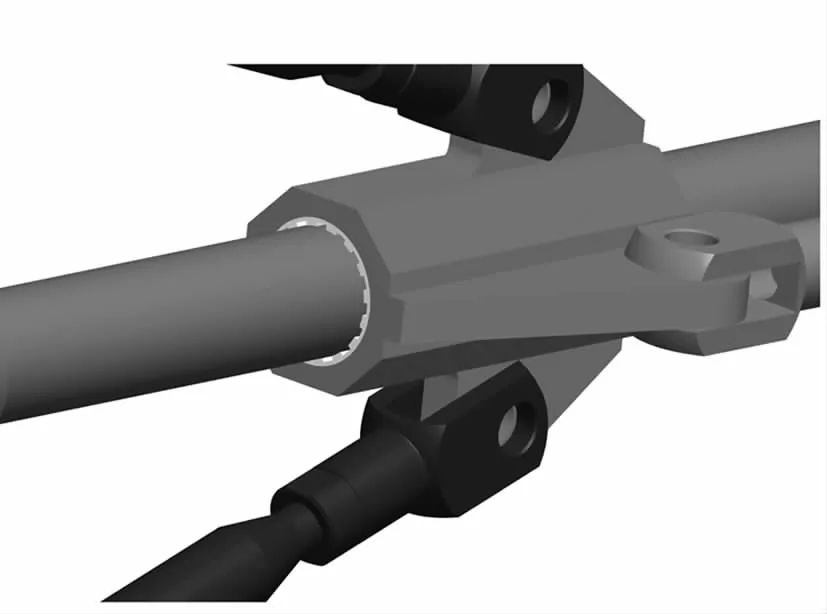
图4 滑块结构示意图
1.5 控制系统
控制系统主要实现对电机正、反转的控制,以使多连杆机构实现展开、收藏作业。另外系统中还设有设备状态检测、安全保护等功能,具体如下:
安全保护:系统中设有过流保护,保护电机在机构发生异常时,不会因为电流过大而烧毁电机;
设备检测:控制系统在带电的状况下,通过状态指示灯,可以知道天线当前处于何种状态;
过程显示:系统中设有过程指示灯,可以在机构工作过程中了解进程状况。
2 主要技术分析
2.1 工作原理
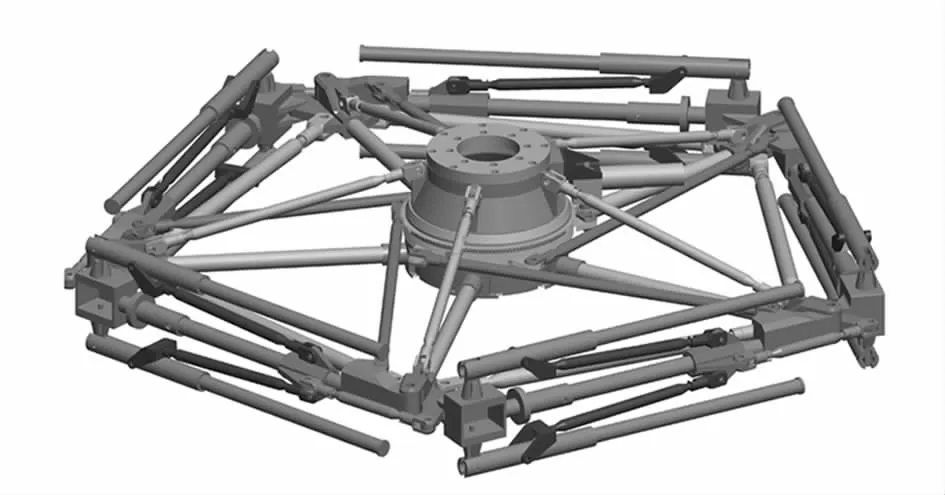
图5 天线收藏示意图
天线展开机构在固定桁架上通过多连杆机构把驱动装置、滑块机构和五个阵源连接在一起。由控制系统控制电机正、反转,通过多连杆机构、滑块机构实现折臂和阵源的折叠展开,从而实现测向天线的收藏、展开。机构同时还利用蜗轮、蜗杆传动的自锁性,使天线展开机构无论在展开、收藏状态均可长时间保持姿态收藏如图5所示,展开如图6所示。
2.2 定位精度分析

图6 天线展开示意图
在天线展开、收藏时采用限位开关来控制电机的转动。在展开状态时限位开关显示展开到位后通过蜗轮、蜗杆传动的自锁性控制无阵源精确到位,展开后直径可控制在5m 以内,误差达到2mm。在收藏状态时,由于运载车辆要进行机动转移,天线阵源将产生大幅度的颤动,桁架接头受力状态很不理想。为改善桁架接头的受力状态,结构设计时,在振子外盒设计一U 形槽结构,使其在收藏状态可以导入相邻的桁架接头的定位块内,这样在收藏状态时,天线单元形成简支结构,从而改善车行进时桁架接头的受力状态。收藏后直径可控制在2.5m 以内,有效缩小了安装空间。
2.3 材料介绍
在本机构中除中心架、传动元件使用铝合金外,其余元件材料均采用非金属材料,采用非金属材料有两点原因:一是满足电讯要求,二是降低系统重量。
桁架的杆件采用玻璃钢管,主要因为玻璃钢这种材料耐候性能好,弹性模量大,具有很好的刚性,以玻璃钢管做为桁架结构的杆件,既可以保证桁架的刚、强度,同时重量也轻。
桁架接头等存在运动关系的构件均采用聚甲醛制作,聚甲醛不仅具有良好的耐候性而且具有一定的自润滑性,可以使多连杆机构长期保证运动自如,减少日常维护。
3 测向天线展开机构结的“死点”分析
机构的卡死点指当机构运动到某些特殊位置时,机构系统中某个或几个运动件会出现运动方向的不确定性,或者不能运动,该特殊位置也称为机构的奇异性[4]。
测向天线展开机构的展开过程是一个空间运动,它有水平滑动也有垂直升降运动。把两根支撑天线阵子的连杆、横臂与固定框架上的横撑杆看成一个三角形,则测向天线展开机构的展开运动就可以看作一种平面机构来分析。现在通过拓扑图及其矩阵来分析运动参数,测向天线展开机构的拓扑图见图7,测向天线展开机构的闭环矢量图见图8。
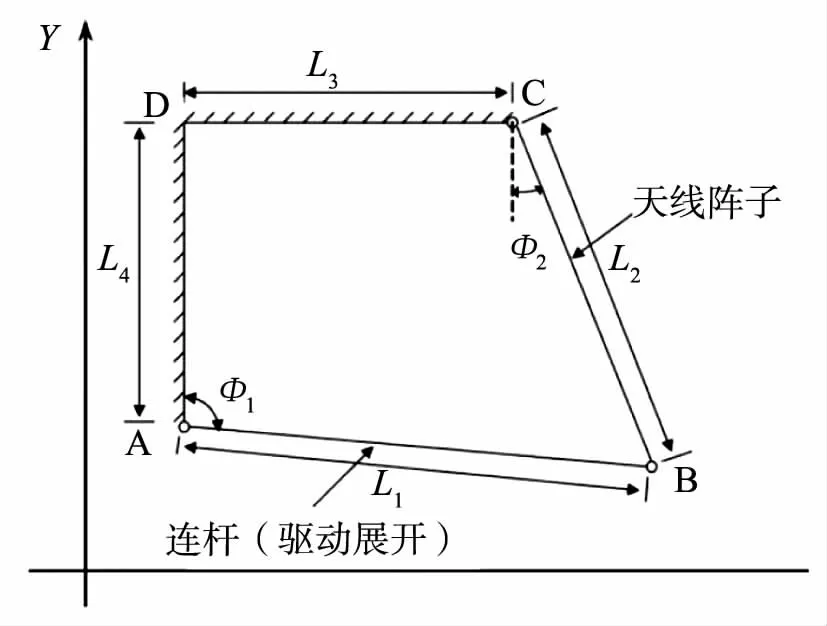
图7 展开机构的拓扑图
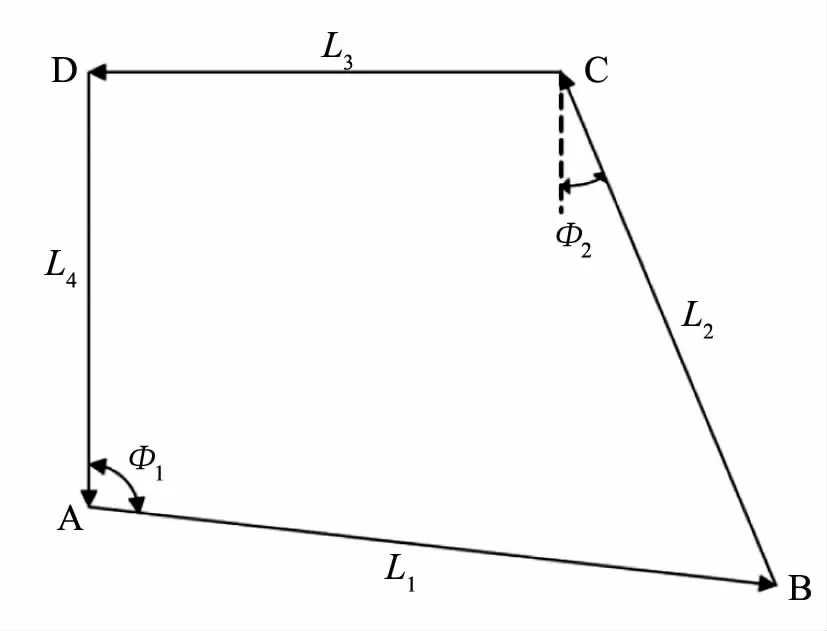
图8 展开机构的闭环矢量图
由图7、图8可见,测向天线展开机构由一个闭链A-B-C-D-A 组成,其驱动连杆A-B的长度为L1,与辅助支杆L4的转角为Φ1,天线阵子的转角为Φ2。在整个机构中,通过L1长度的改变,从而改变转角Φ1和Φ2的度数。在测向天线展开机构中,各矢量在X轴和Y轴方向的投影代数和为零[4],有:

式(1)对时间求导,得:

式(2)用矩阵形式表达为:

式(3)是速度矩阵,则:
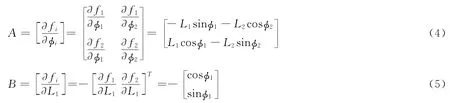
如果方程(3)有解,则测向天线展开机构在展开、收藏的过程中,对于任意位置Φi,代入A中,都有行列式detA≠0,可以确定该机构在展开、收藏的过程中没有卡死点。
如果测向天线展开机构在展开、收藏的过程中,有一些位置点Φi,有detA=0。式(3)经过计算无解或者有多个解。可确定,当该机构运动到该位置时,出现卡死点。
由式(3)、(4)可得到角速度方程为:


由式(8)可知,式(7)detA≠0。因此,图2所示的测向天线展开机构在展开、收藏的过程中不会出现卡死点,展开、收藏过程的每一步都具有确定的运动轨迹。
4 结束语
提出了一种新型测向天线展开收藏机构,该机构可以同时展开、收藏多个测向天线单元,它们只用一套伺服驱动系统,在展开、收藏的过程无干涉、无卡死点,运动过程平滑,结构刚度好、重量轻、摩擦阻力小、控制系统简单、操作灵活方便、可靠。通过采用天线展开机构来实现了五阵源天线阵列的展开、收藏,有效地减小了运输空间,为天线运载车辆的机动性提供了有力保证,为测向天线的发展提供了更广阔的空间。
[1]林昌禄,等.近代天线设计[M].北京:人民邮电出版社,1987.
[2]周朝栋,先天线理论与工程[M].西安:西安电子科技大学出版社,1988.
[3]成大先.机械设计手册[M].北京:化学工业出版社,2002.
[4]曹惟庆.连杆机构的分析与综合[M].北京:科学出版社,2002:10-50.
[5]黄真,赵永生,赵铁石.高等空间机构学[M].北京:高等教育出版社,2005.
[6]Masory O,Wang J.Workspace Evalution of Stewart Platforms[J].ASME,1992,45(12):337-346.
[7]Gosselin G M,Angels J.The Optimum Kinematic Design of a Planar 3-DOF Parallel Manipulators[J].ASME.J.of Mechanical Design,1998,110(1):35-40.
[8]Gosselin G M,Angels J.A Global Performance Index for the Kinematic Optimum of Robotic Manipulator[J].ASME J.of Mechanism Design,1991,113(3):220-226.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:28
制造技术与机床(2019年11期)2019-12-04 05:50:48
制造技术与机床(2017年4期)2017-06-22 11:17:56
中国交通信息化(2017年10期)2017-06-06 07:13:20
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
石油化工建设(2015年6期)2015-12-01 04:17:26
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
现代防御技术(2014年6期)2014-02-28 18:26:38