
车牌定位技术研究
2013-09-11 00:56王学军
河北省科学院学报 2013年2期
李 艳,王学军
(石家庄铁道大学 信息科学与技术学院,河北 石家庄 050043)
汽车交通是现代社会的重要标志之一,车辆数量的急剧增加导致交通阻塞日益严重、交通事故频发、城市交通压力增大,给人们日常生活带来严重影响。传统的交通机制不能满足人们需求,智能交通系统ITS(Intelligent Transportation System)应运而生。其中,车牌识别系统LPR(License Plate Recognition)是计算机视觉、图像处理以及模式识别技术在智能交通领域应用的重要研究方向之一,是实现交通管理智能化的重要环节。车牌识别系统的关键环节主要有车牌定位与提取、车牌倾斜校与字符分割以及字符识别[1]。在此将重点讨论车牌定位算法
1 车牌的定位
从图1车牌识别系统流程可见,只有准确地定位出车牌的位置,才能进行车牌校正、分割、识别,最终得到准确的车牌信息。车牌的定位指的是从摄取的图像中找到汽车牌照的位置,并把含有车牌的子区域取出来,是车牌识别系统的关键技术之一。目前常用的车牌定位技术主要有:彩色图像法、纹理特征分析法、灰度边缘检测法[2]。
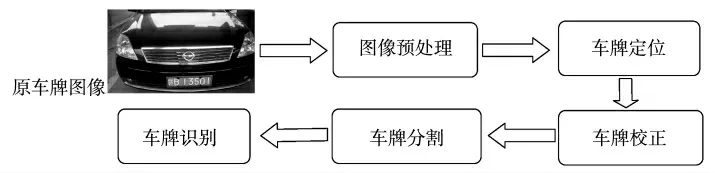
图1 车牌识别系统流程
彩色图像法通过利用图像的颜色信息进行车牌定位,当车牌和车身的颜色相似时,不能够准确定位。纹理特征分析法能够很好地应对车牌倾斜,光照不均或偏弱偏强等影响,但对噪声太过敏感,只适用于外部噪声较少的情况。灰度边缘检测法简单快速,但是当车牌图像的对比度不够高时,定位精度会大大降低。基于现有的多种车牌定位算法,笔者提出了Canny算子和数学形态学方法相结合的方式进行车牌定位。
2 Canny算子和数字形态学结合的车牌定位方法
2.1 图像预处理
图像预处理是对图像深入处理的一个前期准备。采集来的原始图像大多都是彩色图像,存储空间较大,需要先进行灰度化处理,然后将车牌图像二值化[3]。将彩色图像转化成灰度图像的过程称为灰度化处理。彩色图像中的每个像素的颜色都是由三个分量(R、G、B)决定,每个像素的颜色变化范围都是255*255*255种。灰度图像依然可以反映图像的色度和亮度等图像的基本特征。灰度处理就是将RGB图像转化为颜色变化范围只有255种的灰度图像,由此可见灰度处理大大减少图像的后续计算量。
图像经过灰度处理后,亮度等级变为256个。然后灰度图像经过一次阈值调整将256个灰度级的图像调整为只有0和255的过程就是二值化处理过程。图像上各点的灰度值用0和255两个数值来替代,这样处理后的图像只有黑色和白色两种色彩。图像预处理的主要目的是为了增强图像的质量,保证后期图像处理的效果。
2.2 基于Canny算子的边缘检测
目前常用的边缘检测算子有很多。其中,Roberts算子定位的边缘精度高,但是没有去噪功能。Sobel和Prewiitt能对图像进行平滑处理,但容易制造虚假的边缘。拉普拉斯算子对噪声十分敏感,但抗噪能力较弱,易造成边缘不连贯。Canny算子是抗噪和定位精确的折衷选择。
Canny算子是一种寻找图像梯度的局部最大值,由于不同图像受到的噪声影响不同,Canny算子遵循最优边缘检测:
(1)尽量降低检测出来的边缘的错误率。
(2)尽可能使检测出来的边缘和实际边缘相吻合。
(3)对于一个边缘在检测时,尽可能减少响应的次数,在检测到全部有效边缘点的同时,检测到的边缘点尽可能少。
依照上面三条准则,Canny算子检测边缘的步骤[4]如下:首先用二维高斯滤波模板对图像进行滤波以消除噪声,平滑图像。用导数算子找到图像灰度沿着两个方向的偏导数(Gx,Gy),并根据公式(1)求出梯度的幅值和方向。

接下来把边缘的梯度方向分为水平、竖直、45°、135°。各方向通过和临近的不同像素比较,得出一个局部极大值,然后把其他的非局部最大值点置零以得到细化的边缘,这个过程称作非极大值抑制。使用累计直方图计算出两个阈值T1和T2,将图像中所有的点的梯度与两个阈值比较,大于高阈值的,则判定是边缘;而小于低阈值的,一定不是边缘。图2为利用Canny算子进行边缘检测后的车牌图像,边缘检测效果明显,体现了Canny算子的优越性,具有较强的抑制噪声的能力。

图2 Canny算子边缘检测结果图
2.3 基于形态学的车牌定位
Canny算子边缘检测后的车牌边缘效果明显,但丢失了部分边缘信息,从图2中可以看出此时的边缘不是连续的,还需要进行形态学的处理,使车牌部分成为一个连通的整体。
数学形态学有膨胀、腐蚀、开启和闭合四种基本运算[4]。对于集合Z中的集合A 与B,其中A 代表原始图像,B代表结构元素,那么B对A 的腐蚀运算公式为公式(2)。腐蚀是结构元素B在图像A 上移动,并与覆盖的二值图像“与”操作,如果都是1,结果图像上对应的像素为1,否则为0。它可以消除图像中的孤立点和小噪声,使二值图像减小一圈。腐蚀结果图像是原图像的收缩。

而B对A 的膨胀可用公式(3)表示,其中⌒B味集合B的映射集,而Φ 表示空集。膨胀是结构元素B在图像A 上扫描,并与覆盖的二值图像“与”操作,若都是1,则结果图像的对应像素为0,否则为1。膨胀的功能与腐蚀相反,它使二值图像扩大一圈,膨胀算法常用作桥接裂缝,填补物体的空洞。

腐蚀和膨胀不互为逆运算。先腐蚀后膨胀叫做开运算,先膨胀后腐蚀叫做闭运算。开运算可以在纤细点出分离物体、平滑大物体边界、消除小物体等,而比运算可以连接邻近物体、平滑边界、填充物体的小空洞等。开运算和闭运算都不会明显改变图像内物体的面积。
图3(a)为对边缘检测后的图像做腐蚀运算的结果图,可以看出它只是提取了原图像的骨架,还不是连续的区域,再对它进行膨胀处理,将为联通的区域连接在一起,得到图3(b)。在图像3(b)中可以看到,包含车牌区域的白色块状区域。
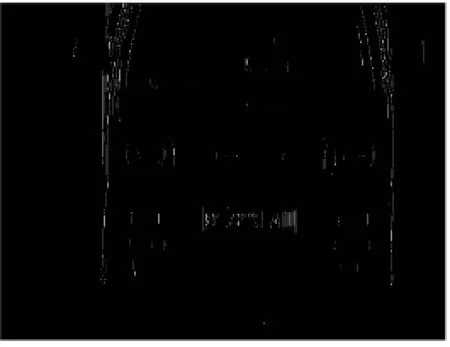
图3 (a)腐蚀后的车牌图像

图3 (b)膨胀后的车牌图像
2.4 选定车牌区域
形态学处理后,产生几个车牌候选区。利用Matlab中的Bwboundaries函数获取车牌图像中所有白色区域的边缘坐标,设定好长宽比范围的大小,不满足这个长宽比范围的白色区域,我们就视为非车牌区域并将其删除,最后余下的区域为初定位的候选车牌区域。但这种方式相对简单,却有很大的弊端,容易选择非车牌区域作为目标区域。将几种不同的方法综合使用,比用单个方法确定车牌区域更准确,更高效。
我国的车牌特征主要是矩形的,并且长宽比固定在一个范围内,车牌上的字符灰度变化频繁。因此这里采用面积、长宽比、垂直投影的多种方法相结合的方式确定车牌区域[5]。首先将各个区域提取最大矩形区域作为候选区域。设定一个参数C 作为置信度,来判定各区域是车牌区域的可能性。
我国车牌的长宽比在0.3-0.34之间,矩形车牌候选区域的长宽比E1越接近这个值,置信度C1就越大。长宽比E1可以通过Matlab中的Bwboundaries函数直接获取。
垂直投影特征值E2是由二值图像的灰度变化频率决定的,特征值越大,置信度C2越大。E2的计算如下式所示,1000是固定的规范化因子,LU代表垂直投影直方图中的波谷到波峰的总路径长度,LD代表波峰到波谷的总路径长度,IW是图像的宽度。

面积E3是二值图像内部像素值不为0的数目,面积越大,置信度C3越大。
利用者三个因素综合分析,最终的置信度值C(E)=∑RiCi(Ri是不同因素的权值,Ci是不同因素的特征置信度)。这种综合法可以有效地避免使用单个方法产生的定位错误问题,能准确的定位到真正的车牌区域。实验结果如图4所示。

图4 车牌定位结果图
3 结论
车牌定位是车牌识别技术最重要环节之一,是车牌进行分割、识别的前提工作。利用Canny算子进行边缘检测,在抑制噪声和获取真实边缘之间取得较好的平衡。通过形态学运算,进一步消除车牌图像的噪声信息,很大程度提高了车牌定位的精度。结合这两种算法,在matlab环境下进行实验。其结果证明该车牌定位算法能够较为准确地定位到车牌区域,可以有效解决实际问题,有良好的实用价值。
[1]郁梅,蒋刚毅,郁伯康.智能交通系统中的计算机视觉技术应用[J].计算机工程与应用,2001,(10):101-103.
[2]魏娜,王振臣,张聪,等.一种新型车牌定位算法的研究[J].图像与信号处理,2012.42:937.
[3]张思俊,王乐乐,陆振宇.基于Canny算子边缘检测的车牌图像增强方法[J].重庆交通大学学报(自然科学版),2012,(6):439.
[4]姚敏.数字图像处理[M].机械工业出版社.北京.2006.
[5]李刚,曾锐利,王蒙军,等.基于数学形态学的车牌定位算法[J].仪器仪表学报.2007,28:1323.
猜你喜欢
数学物理学报(2021年2期)2021-06-09
应用数学(2020年2期)2020-06-24
电子制作(2019年12期)2019-07-16
数学年刊A辑(中文版)(2018年2期)2019-01-08
小猕猴智力画刊(2017年5期)2017-05-25
电子制作(2017年22期)2017-02-02
数学物理学报(2016年3期)2016-12-01
中国继续医学教育(2015年2期)2016-01-06
振动、测试与诊断(2014年6期)2014-03-01
现代检验医学杂志(2014年1期)2014-02-06
