
基于RSSI测距的交点质心定位算法研究与室内应用修正
2013-09-10 00:45叶萍张彦公安部第一研究所北京100048
自动化博览 2013年3期
叶萍,张彦(公安部第一研究所,北京 100048)
1 引言
目前无线传感器网络节点定位技术主要分为两大类:基于测距的定位机制和无需测距的定位机制。基于距离的定位方法需要建立测距模型用于测量传感器节点间的距离,但与无需测距的定位方法相比,其定位精度更高。基于测距的定位机制,通过测量节点间的实际距离或方位来确定节点的位置,通常采用测距、定位和修正等步骤实现。这类定位算法主要有基于电波传播时间(TOA)的定位、基于电波传播时间差(TDOA)的定位、基于电波入射角(AOA)的定位、基于信号强度(RSSI)的定位等。基于RSSI测距由于只需要较少的开销和较低的实现复杂度,成为近几年室内定位研究的热点。本文首先对基于RSSI的测距模型进行分析和参数优化,然后采用基于RSSI测距的交点质心法实现节点定位,并依据室内应用特点对交点质心法进行修正,最后通过应用证实了修正方法在室内环境低密度部署条件下能有效提高定位精度。
2 RSSI测距模型
无线传感器网络中常用的无线信号传播模型主要有以下3种:自由空间传播模型(Free Space Propagation Model)、对数距离路径损耗模型(Log-Distance Path Loss Model)、对数正态阴影(Log-Normal Shadowing Model)模型。自由空间传播模型适用于发射节点(T)和接收节点(R)之间在完全无阻挡的视距路径情况下的距离估计,而实际室内环境存在多径、绕射、障碍物等干扰因素,模型计算值与实际有很大的变化。对数距离路径损耗模型指出平均接收信号功率随距离的变化呈对数衰减,此模型改善了自由空间传播模型在实际环境应用中的诸多缺陷,但没有考虑在相同的T-R距离情况下,节点位置的环境差异会对估算结果造成明显差异。Shadowing模型在对数距离路径损耗模型基础上,依据测量数据的统计特性指出,特定位置的路径损耗满足随机正态对数分布,即


3 测距模型参数优化
表1 环境参数经验测量值

表1 环境参数经验测量值
?


选择室外(体育场空地)和室内(办公室)两种环境拟合测距模型参数。信号采样时参考节点与移动节点保持在同一方向直线上,室外环境模型拟合度高(如图1所示),其中黑点为采集的信号-距离点集,曲线为拟合模型:

实验中发现,在室内环境下同一移动节点在相同位置接收到的RSSI具有一定的波动性,尤其在较远距离情况下(如图2所示)。为减少一次采样的随机性对参数拟合的影响,在利用测距模型估算距离前,先对接收到的RSSI值进行均值滤波处理,即为同一设备在同一位置n次采样信号的平均值,滤波处理后室内环境拟合如图3所示,曲线为拟合模型。

图1 室外测距模型拟合

图2 室内信号多次采样
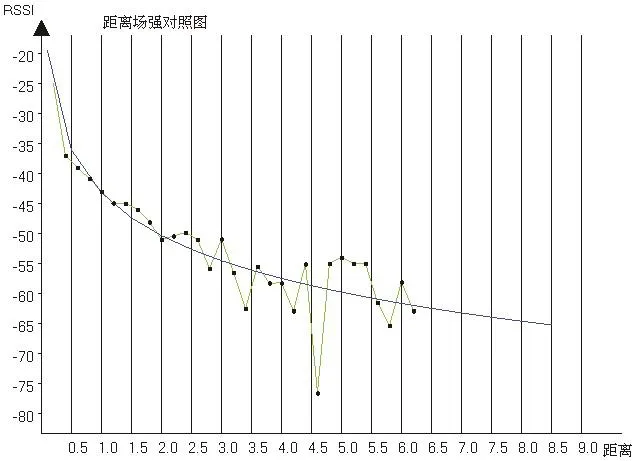
图3 均值滤波后模型拟合

与室外环境对比可见室内环境下信号强度会出现毛刺现象,这是室内环境下信号受多径、绕射、障碍物等干扰引起的。为平衡信号在特殊区域发生大波动给模型训练造成的影响,实验设计了3种信号采样模式比较测距精度:(1)直线式:参考节点与移动节点保持在同一方向直线上;(2)十字交叉:在直线式基础上增加垂直方向上的移动节点采样;(3)散点式:移动节点在房间内部均匀分布采样。
环境选择室内小型办公室,设备布局如图4所示,检验点选择1.6m×1.6 m 分布的30点。依据三种训练方式分别计算三组模型参数并分别计算平均测距误差(见表2),平均测距误差定义为所有检验点估计距离与真实距离的误差总和的平均值。测试结果表明采用散点式采样训练的模型精度较高。

图4 室内测距模型训练布局
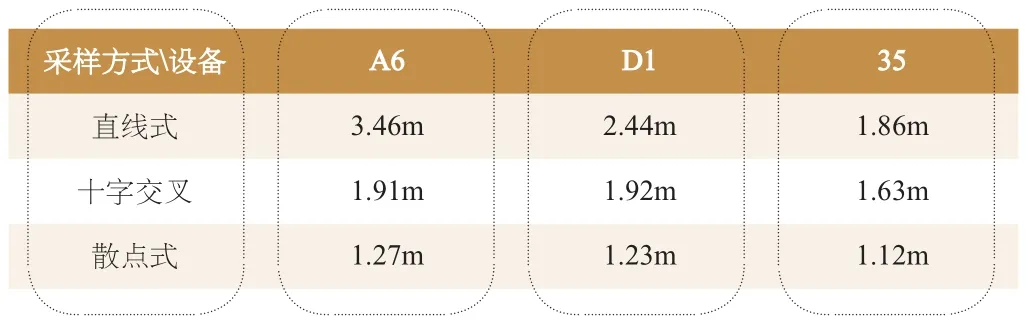
表2 三种采样方式的平均测距误差比较
4 交点质心定位算法
无线传感器节点定位过程中,当移动节点获得与邻近的参考节点之间的距离信息后,通常采用以下原理估算位置:三边测量法、极大似然估计法、极小极大法等。三边测量法是一种基于几何计算的定位算法,利用3个不同半径的圆相交交点特性求解位置信息;极大似然估计依据最小二乘法求解n维坐标距离线性方程组来估算位置;极小极大法通过3个不同边长的正方形相交区域质心特性求解位置信息。国外已有对三种方法的性能研究,结果表明在一定环境下(12m×19.5m范围),极大似然估计法的计算量最大;参考节点小于10个时,极小极大法的计算量最小,在参考节点较少情况下,三边法和极小极大法的精确度较高,而当参考节点超过6个时,极大似然估计法精确度更高。基于应用节点密度低、实时性强的需求,实验选用了基于三边测量法原理改进后的交点质心定位算法。
依据3个参考节点(信号强度最强的3个)的RSSI值和位置确定一个未知移动节点的位置,交点质心法步骤如下。设参考节点坐标为,,,移动节点接收到A、B、C三点的RSSI值为、、,利用测距模型估算移动节点到A、B、C的距离为
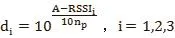
分别以A、B、C为圆心,d1、d2、d3为半径画圆,则移动节点应该出现在3个圆的公共区域内,移动节点的坐标(x,y)满足

矩阵求解可得

依据交点质心法不论3圆是否两两相交,均可求得移动节点坐标的实数解。
5 室内应用下算法修正
在实际参考节点布控时,数量一般会超过3个,利用交点质心法定位选取信号强度最强的3个RSSI值。但在信号选取时发现,经常会有第3个信号强度与第4个信号强度区分度不高的情况出现。为避免单组RSSI计算位置造成定位偏差,选用信号强度最大的4个分成两组(组合与组合),分别计算移动节点坐标,再求其平均。
依据较小传输距离内信号强且不易波动的特点,可为移动节点设置一个可信位置区域。假设强信号值设置为Filter(RSSI),测距模型在信号强度为Filter(RSSI)时对应的距离估计值为Filter(d),当接收信号强于Filter(RSSI)时,可认为移动节点位于以该参考节点为圆心,Filter(d)为半径的圆内部,此时利用交点质心法估算坐标,如果位于限制区域外部时,可判断估算坐标偏差较大,优化方法为强制调整估算坐标至限制区域边界。
6 应用
实验环境选择8m×9m的室内大厅,大厅南侧为落地窗台,北侧为走廊通道,东西侧周边均有障碍物。测距采样点选择1.6m×1.6 m 均匀分布的25点,检验点采用0.8m×0.8 m 均匀分布的81点,实验设备选用5个参考节点(93、47、73、B7、96)和1个移动节点(D1),布控位置如图5所示。
依据RSSI测距模型,选择散点式采样方法,对5个参考节点同时采样,然后计算模型参数,拟合模型(如图6所示)为:

图5 实验环境部署

图6 实验环境测距

依据测距模型估计距离,对均匀分布的81点统计测距误差,以设备47为例,平均测距误差为0.90米(如图7所示)。

图7 设备47的测距误差

图8 定位误差对比
依据测距模型,用交点质心法估算移动节点坐标,设定Filter(RSSI)=-55.5dB,Filter(d)=1.5m,对81个检验点进行定位误差统计,定位误差定义为所有检验点估计位置到真实位置的欧式距离的误差值,修正前后定位误差对比见图8和表3。从平均定位误差和覆盖率指标看,修正后的定位算法可有效提高定位精度。
7 结语
由于各种应用需求的差异性,无线传感器网络的定位至今还没有形成公认的解决方案,目前的定位算法大都在定位精度、时间、能量、通信量等因素上作了折中考虑。本文重点研究了基于RSSI测距的交点质心定位算法,通过线性回归、均值滤波、分散训练等方法优化了测距模型,并依据室内应用特点对交点质心定位算法作了修正。应用结果表明,在室内环境低密度部署条件下,修正后的定位算法可在一定程度提高定位精度。

表3 修正前后误差指标分析
[1]Ali S,Nobles P.A novel indoor location sensing mechanism for IEEE 802.11 b/g wireless LAN[c]∥IEE The Fourth Workshop on Positioning,Navigation and Communication(WPNC’07),2007:9-15.
[2]Theodore S Rappaport.Wireless Communications: Principle an Practice[M].2nd Edition. New Jersey: Prentice Hall,2002:69-138.
[3]朱明辉,张会清.基于RSSI的室内测距模型的研究[J].传感器与微系统,2010,Vol.29,No.8.
[4]王伟,陈岱,周勇.基于测距修正和位置校正的RSSI定位算法[J].计算机工程与设计,2011,Vol.32,No.2.
[5]朱浩,顾宗海,苏金,刘岩,章晨.一种基于交点质心求解的RSSI定位算法及其优化[J].郑州大学学报(工学版), 2010,Vol.31,No.6.
[6]邓琛,叶志群.基于无线传感器网络的低功耗室内定位系统[J].测控技术,2011,Vol.30,No.3.
[7]胡斌.基于RSSI量化模型的无线传感器网络定位技术研究[C].武汉理工大学硕士学位论文,2009.
[8]陈茂聪,田华.移动无线传感器网络定位算法研究[J].通信技术,2011,Vol.44,No.6.
[9]GOLDONI E,SAVIOLI A,RISI M,et a1.Experimental analysis of RSSI-based indoor localization with IEEE 802.15.4[C].2010 European Wireless Conference,2010:71-77.
[10]彭宇,王丹.无线传感器网络定位技术综述[J].电子测量与仪器学报,2011,Vol.25,No.5.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
科学(2020年3期)2020-01-06
学生导报·东方少年(2019年7期)2019-06-11
中国惯性技术学报(2019年6期)2019-03-04
数学学习与研究(2017年11期)2017-06-20
电子制作(2017年7期)2017-06-05
青年时代(2017年3期)2017-02-17
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
