一种欠定位水下机器人的目标搜索研究
2013-09-08 07:59徐国华颜明重
中国机械工程 2013年2期
申 雄 徐国华 余 琨 颜明重
1.华中科技大学,武汉,430074 2.中国舰船研究设计中心,武汉,430064 3.上海海事大学,上海,201306
0 引言
水下机器人被广泛运用于水下作业活动中,是水下作业的重要载体。水下目标搜索是水下机器人的作业任务之一。水下目标搜索首先需要实现机器人的水下定位,配置齐全的水下机器人一般采用超短基线系统(ultra-short baseline,USBL)、惯性导航系统(inertial navigation system,INS)等进行水下定位。Opderbecke[1]针对 USBL在 AUV(autonomous underwater vehicle)水下定位的运用上进行了研究;Jalving等[2]采用融合了INS、DVL(doppler velocity log)等信息的组合定位方法,进一步提高了水下机器人的水下定位精度。搜索策略是贯穿水下搜索任务的指导思想,搜索路径的规划则是策略的主要体现。Petres等[3]和国内的徐玉 如 等[4]、Wang 等[5]针 对不同的作业任务,分别研究了AUV的路径规划方法。对于搜索任务而言,对目标物的识别是整个任务的重要环节。针对水下机器人通常搭载的水下摄像头和前视声纳,徐筱龙等[6]分别进行了视频信号模式识别的研究,Lorenson等[7]则针对AUV声纳图像的处理和识别进行了研究。
目前,国内配备小型水下遥控机器人(remotely operated vehicle,ROV)的单位逐渐增多,如何利用ROV和已有设备进行水底目标搜索受到越来越多的关注。但由于受体积和成本限制,很多小型ROV没有装配以USBL、INS为代表的水下定位设备,因此欠定位ROV不能给出标记自身的行进路线和已搜索区域。在这样的设备基础上,如果参照应用于定位功能齐全的ROV或AUV的搜寻策略,将难以保证搜索效率和搜索覆盖率。
在水下起伏较大的水域中,其底部深度变化幅度较大,其等深线间距(以ROV深度计有效分辨率大小作等深线,且其间距小于ROV的有效观测范围)较小。可以利用先验的等深线地图,配合ROV深度计实现ROV的初步定位。在初步定位的基础上,再通过选择对定位精度要求低的搜索策略,实现ROV对水底目标的搜索。
本文在设备仅限于欠定位ROV和侧扫声纳的基础上,提出了针对水下起伏较大水域的特殊情况,基于水下等深线图路径规划和导航的搜索策略,通过绘制水下地形图、规划搜索路径和搜索作业等,实现欠定位ROV对大起伏地形中的水下小型目标的搜索。
1 设备及功能
本文中,图1所示的小型开架式ROV“Outland1000”为传感器的载体,能在300m水下通过遥控实现进/退、侧移、潜/浮和转首四个自由度的运动,由脐带缆与水面控制器连接。通过开发自动航行控制器代替操作人员和遥控器,将ROV改造为具有自动航行能力和干预功能的ARV(autonomous &remotely-operated vehicle),可以实现控制精度更高的控制,并减轻操作人员的负担。
ARV搭载的传感器包括双目摄像头、Micron DST型前视声纳、小型磁罗经、深度计和高度计。ARV会通过脐带缆将水下视频信号,前视声纳图像,ARV实时航向、深度和离底高度等信息传输至水面控制器。其中,水下视频信号、前视声纳图像可用于辨识水下目标或障碍物。而ARV实时航向、深度、离底高度等信息则表示了ARV的水下状态,在水下先验地形图的配合下可用于ARV的水下导航。
侧扫声纳是一种向水底发射超声波,接收反射后的声纳信号并成像以实现水下地形探测的设备。在本文中,选用经济的Starfish公司450F型侧扫声纳进行水下探测,如图1所示。
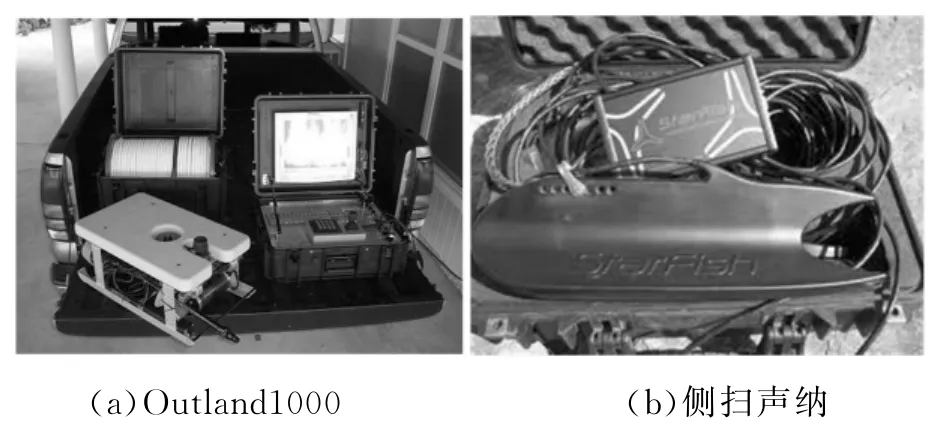
图1 搜索作业设备
2 搜索策略设计
由于本文讨论的ARV缺乏水下定位能力,所以可以让其沿等深线地图贴底航行,这样在单条等深线上,ARV就可以利用航向、深度、高度信息,沿着等深线轨迹航行。以此思路,设计搜索流程如图2所示。
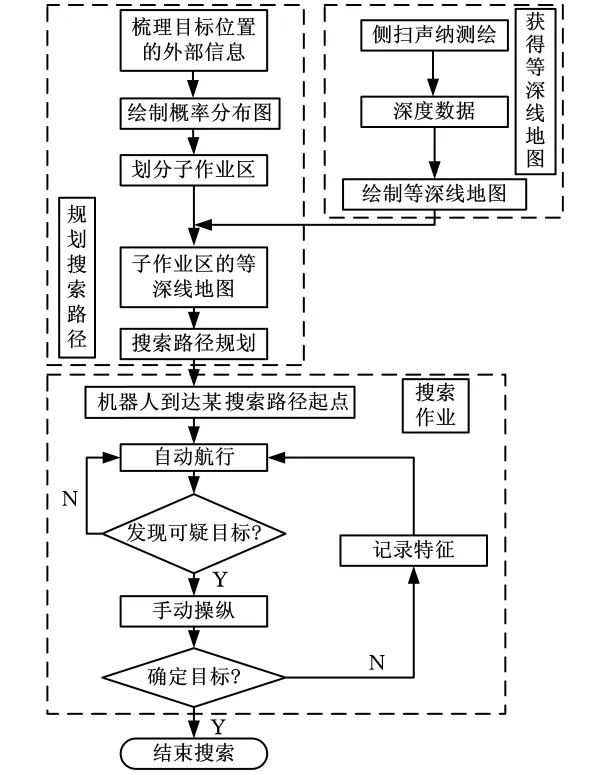
图2 搜索作业流程图
整个搜索流程按照绘制水下等深线地图、规划搜索路径和搜索作业的步骤进行。
由于作业任务并不要求完全脱离操作人员的监督和设备的限制,所以水下地形图不需要包含水下地形特征库等信息,使用侧扫声纳绘制出一定密度的等深线地图即可。
通过分析与目标位置有关的外部信息,初步估计并计算目标在作业水域中各点的概率值,以此划分出优先级不同的子作业区,再将等深线地图与各自作业区叠加,依据ARV的探测能力,规划出其搜索路径。
进行搜索作业时,ARV被母船定位到指定地点入水,由自动航行控制器通过等深线地图进行导航。操作人员对前视声纳图像和水下视频进行监视,当出现疑似目标或障碍物时,切换成手动模式进行遥控。并通过声纳图像处理程序进行图像处理,提取特征并计算出与ARV的相对位置,以供操作人员在水下地形图中进行标注。
2.1 水下地形图的绘制
侧扫声纳一般用于获得水底地形和搜寻水底大型残骸,但本文只讨论侧扫声纳用于测量水深以绘制等深线地图的方法。
侧扫声纳的拖鱼左右侧各安装一条换能器线阵。工作时首先发射一个短促的声脉冲,声波按球面波方式向外传播,碰到水底或水中物体则产生散射。其中的反向散射波会按原传播路线返回换能器被换能器接收,经换能器转换成一系列电脉冲。一般情况下,坚硬或凸起的水底回波强;柔软平滑的水底回波弱;被遮挡的水底不产生回波;距离越远回波越弱。通过对电脉冲进行采集和相应的数字化处理,得到以若干扫描线构成的二维水下地形声图[8],如图3所示。
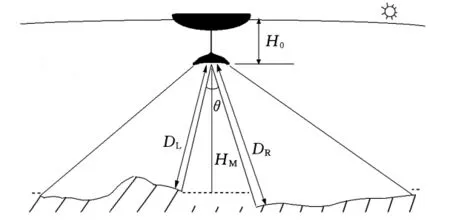
图3 侧扫数据分析
图3中,侧扫声纳的两侧波束存在夹角θ,夹角范围内为侧扫声纳的盲区。已知盲区边缘回波的探测距离为DL、DR,由下式即可得其相对侧扫声纳拖鱼的相对深度HL和HR,平均后可知拖鱼正下方的相对深度。已知拖鱼离水面的距离固定为H0,则可通过插值计算出侧扫声纳此刻位置的水深HM。HL、HR、HM的表达式为
通过软件截取侧扫声纳的每条数据,获得该时刻的DL和DR值,再根据式(1)即可计算出该点水深。使用同样的方法可获得整个作业区域的深度数据,再将等深的坐标点依次连接,得到等深线地图,如图4所示。
图4 等深线地图
2.2 搜索路径规划
对于多数搜索任务,其作业区域内每点的重要性是不同的,因此,通过梳理外部信息,将作业区域按照优先级划分为不同的子作业区并依次搜索,能在一定程度上提高效率。
通过在作业区域内选取一个或多个可能性最大的点,并分别赋予一个可能的概率,假设其周围的各点受其影响,依次形成一个作业区域内概率的场,并以其作为作业区域的概率分布图。具体来说,假设在若干大概率的目标存在点中有一点为i,其周边各点的概率均受其影响,可认为
其中,(μxi,μyi)为大概率目标存在点i的坐标,Pi为点i的目标存在概率。可将其简化为标准分布,取σxi=σyi=1。式(2)可写作

在得到区域内多个主要大概率离散点周边点的概率后,便可以知道区域内每点的目标存在概率。对所有大概率点所引起的概率分布进行求和,可得到区域内的概率分布:

根据概率分布的集中情况,对不同概率的区域进行划分,细分为多个具有不同优先级的子作业区,如图5所示,再将其与等深线地图进行叠加,即可进行最后的路径规划。
不同于通常的沿方波搜索路径规划,本策略采用如图6所示的基于等深线搜索路径规划。因为搜索任务需要ARV贴底进行且工作区域内的深度变化较大,过多的起伏运动会导致欠定位的ARV偏离航向;另一方面,通过沿等深线进行搜索,ARV即可通过深度计和高度计的反馈得知是否偏离预定路径。
图5 通过概率分布划分优先级
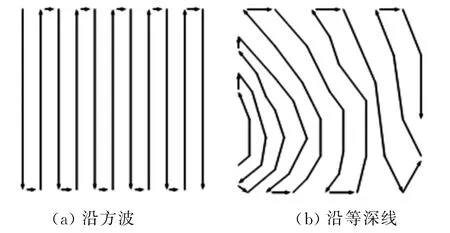
图6 路径规划方式
在路径规划中,相邻路径间的间距大小直接影响到路径规划的合理性。间距太大会使对作业区的搜索覆盖率降低,造成遗漏,反之则影响作业效率。相邻路径的理想间距d由ARV的视觉和前视声纳的探测半径决定,同时也与ARV在被操纵中的定向航行性能有关。理想间距d的计算方式为

其中,D0为ARV视觉的探测半径;p0为视觉探测半径内对目标的辨识可信度,取值介于0~1之间;D1为前视声纳的探测半径;p1为声纳探测半径内对目标的辨识可信度;H(s)用于表示ARV的定向航行性能,定义为遥控操作ARV定向航行时,每行驶s,ARV实际位置偏移量。s的取值由ARV缆长及作业区域地形特点等确定。
由式(5)可以看出,在探测设备确定的情况下,通过缩短每趟搜索的航程、利用水下特征物作路标、减少ARV翻越地形的次数等,都能减小ARV的H(s),从而增大ARV搜索路径的理想间距d,提高效率。但是由于式(5)中多个参数难以准确地确定,理想间距d难以计算,该公式只用于分析影响搜索路径间距的因素。在实际操作中,可以根据实际情况取一个小于视觉探测直径的值。
在各个子作业区的等深线地图中,保留相邻距离总是小于d的等深线,作为子作业区中搜索作业的ARV规划路径。
2.3 搜索作业
搜索作业时,母船携带ARV到分段规划路径的起点定点下水,当ARV下潜至离底部某距离处,核实当前深度是否与等深线地图中的深度相等,不等则在小范围内巡游直至找到相应的深度点。随后即可切换至自动航行控制器对AVR进行导航。通过之前建立的Outland1000水动力学模型[9]和等深线地图,自动航行控制器能操作ARV沿规划路径航行。
当监视水下视频和前视声纳图像的操作人员发现可疑目标时,可将ARV切换至遥控模式。同时可以使用声纳图像识别程序对声纳信号进行处理,并在等深线地图中加以记录。
声纳图像识别程序可以通过RS485接口获得Micron DST型前视声纳的实时数据,将其解析并绘出整幅声纳图像。在进行图像处理时,先通过中值滤波算法去除高频的干扰噪声、进行阈值分割[10]。再经过边缘检测和特征图形提取之后,可以得到物体的图像大致形状、尺寸和与ARV的相对位置关系,识别过程如图7所示。随后,操作人员将识别后的信息记录到等深线地图中。
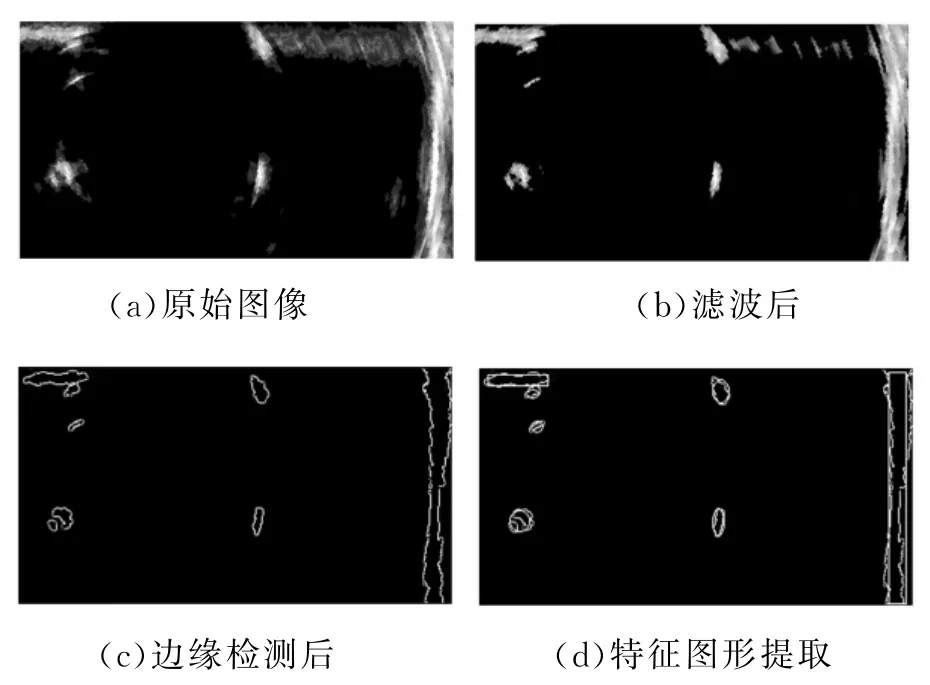
图7 处理声纳图像
2.4 搜索策略比较
完成整个搜索策略的设计后,将该搜索策略和常用的沿方波搜索进行比对。下面先对搜索的时耗问题进行分析。
搜索策略的时间花费,主要与ARV的航行速度和搜索路径长度有关。对于本搜索策略和沿方波搜索策略,在都不进行重复搜索,且依照ARV有效探测距离规划路径的情况下,搜索路径的总长度近似相等,总长度S=A/d。其中A为搜索面积,d为理想间距。
但是由于本搜索策略相较常用策略,采用将作业区域按概率划分后依次搜索的方法,能在一定程度上提高搜索效率。如图5b所示的情况,将作业区域划分为3个区域,则搜索任务的时间期望为
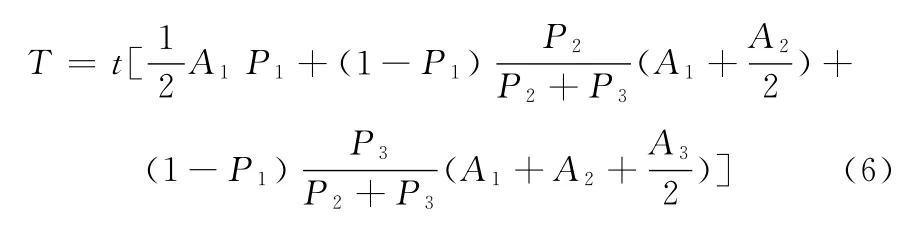
式中,t为ARV搜索每km2的平均时间花费;A1、A2、A3为三个区域的面积;P1、P2、P3分别为三个区域中目标存在的概率。
对图5所示区域进行计算,结果如表1所示。
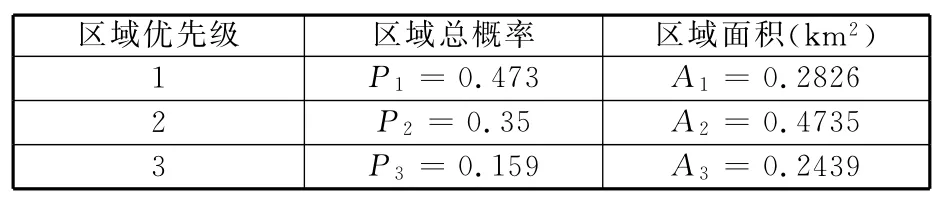
表1 三个优先级区域的参数
将表(1)中数据代入式(6),时间期望为0.3996,低于常用策略的时间期望。并且当区域内概率越集中时,本搜索策略的优势越明显。
本搜索策略与常用策略相比最大优点在于,本策略通过使ARV沿等深线航行并搜索,欠定位ARV能通过深度值的反馈,在检测到偏航后(深度值偏离了需跟踪的等深线值)对航线进行修正,使其摆脱对精确定位的依赖。而常用策略中,欠定位ARV则较难按照预定航线进行搜索作业。
3 湖试
为验证文中搜索策略,在湖北省荆门市漳河水库中选取了1000m×1000m的一片水域进行了实验。实验区域水下地形起伏大(深度介于3~45m之间)、风浪小等特点,较为符合文中的搜索策略要求。实验中的搜索目标选用尺寸不同的两个圆柱体,目标物1的尺寸为高1.6m、直径0.5m,目标物2为高3m、直径0.6m。两个目标物由第三方分别沉入实验区域内的不同位置。
按照本文的策略,首先利用侧扫声纳获得作业区域等深线数据,整理后导入Google Earth可得到等深线地图,如图8a所示。在此基础上,根据对目标可能存在点的外部信息进行梳理,作出作业区域的概率分布图。按照概率的大小将作业区域划分为三个不同优先级的区域,并与等深线地图叠加,如图8b所示,之后再确定理想间距d。根据现场情况,取理想间距d为5m。以5m为间距添加更多的等深线,以此作为ARV的搜索路径。
在搜索实验中,ARV依次在各优先级区域中作业,沿逐条等深线路径进行搜索,先后对两个目标物成功定位。实验表明了搜索策略对欠定位ARV在大起伏地形中小目标搜索问题的有效性[11]。
4 结语
本文提出一种欠定位ARV对大起伏地形中水底小目标的覆盖式搜索策略。在外部信息的支持下,按概率划分出优先级不同的子作业区。通过按等深线地图规划出的搜索路径,应用已有的深度、高度、航向传感器和等深线地图对欠定位ARV进行了导航。最后利用水下视频和前视声纳进行了人工目标识别。在水库的水下大起伏地形环境中进行了实验,取得预期的结果,证明了策略的有效性。
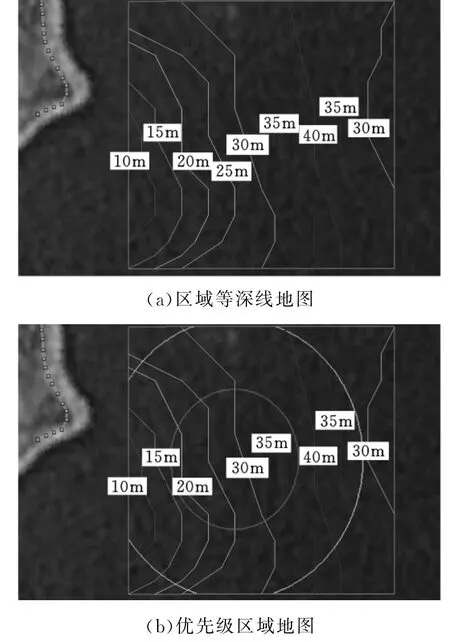
图8 作业区域地图
提出的搜索策略对欠定位ARV的水下目标搜索问题具有一定的工程意义。通过对非结构目标声纳识别技术的进一步研究,还可以逐步减少操作人员的介入,提高ARV在水下目标搜索上的智能程度。
[1]Opderbecke J.At-sea Calibration of a USBL Underwater Vehicle Positioning System[C]//Oceans’97MTS/IEEE Conference Proceedings.Halifax,1997:721-726.
[2]Jalving B,Gade K,Hagen O K.A Toolbox of Aiding Techniques for the HUGIN AUV Integrated Inertial Navigation System[J].Modeling Identification and Control,2004,25(3):173-190.
[3]Petres C,Pailhas Y,Patron P.Path Planning for Autonomous Underwater Vehicles[J].IEEE Transactions on Robotics,2007,23(2):331-341.
[4]徐玉如,姚耀中.考虑海流影响的水下机器人全局路径规划研究[J].中国造船,2008,46(4):109-114.Xu Yuru,Yao Yaozhong.Research on AUV Global Path Planning Considering Ocean Current[J].Shipbuilding of China,2008,46(4):109-114.
[5]Wang Hongjian,Xiong Wei.Research on Global PathPlanning Based on Ant Colony Optimization for AUV[J].Journal of Marine Science and Application,2009,1(8):58-64.
[6]徐筱龙,徐国华.OutLand1000水下机器人的视觉定位研究[J].中国机械工程,2010,21(11):1288-1292.Xu Xiaolong,Xu Guohua.Vision-based Localization of OutLand1000ROV[J].China Mechanical Engineering,2010,21(11):1288-1292.
[7]Lorenson A,Kraus D.3D-Sonar Image Formation and Shape Recognition Techniques[C]//OCEANS 2009-EUROPE.Bremen:2009:849-854.
[8]许枫,魏建江.第七讲 侧扫声纳[J].物理,2006,35(12):1034-1037.Xu Feng,Wei Jianjiang.Side-scan Sonar[J].Physics,2006,35(12):1034-1037.
[9]张燕,徐国华,徐筱龙,等.微型开架式水下机器人水动力系数测定[J].中国造船,2010,51(1):63-72.Zhang Yan,Xu Guohua,Xu Xiaolong,et al.Measuration of the Hydrodynamic Coefficients of the Microminiature Open-shelf Underwater Vehicle[J].Shipbuilding of China,2010,51(1):63-72.
[10]王一童.前视扫描声纳的成像与目标特征提取[D].青岛:中国海洋大学,2009.
[11]原风,闫春阳.水下机器人助警方河底捞尸锁铁证[N].楚天金报,2010-12-13(13).
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
潍坊学院学报(2021年2期)2021-07-22
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
中国交通信息化(2019年4期)2019-07-13
小学生导刊(低年级)(2016年5期)2016-05-27
火控雷达技术(2016年2期)2016-02-06