
基于虚拟仪器的气动伺服系统实验平台设计
2013-09-06 12:05王波,王涛,金英
实验技术与管理 2013年11期
王 波,王 涛,金 英
(北京理工大学 自动化学院,北京 100081)
气动技术是以空气压缩机为动力源、以压缩空气为工作介质进行能量传递或信号传递的工程技术,是实现各种生产控制、自动控制的重要手段之一[1-2]。随着微电子技术、计算机技术的迅猛发展和控制理论的不断完善,气动伺服技术特别是气动位置伺服系统,以其节能、无污染、成本低廉、结构简单、维修方便、系统安全可靠、适应范围广泛等优点,渗透到工业领域各部门,在工业发展中占有十分重要的地位[3-5]。
北京理工大学自动化专业是以电为主,集机、电、液、气控制为一体,军民结合,突出实践能力和创新能力的国家级特色专业[6]。为了更好地提高学生的综合素质、培养学生的实践创新能力和工程素养,与“流体传动与控制基础”北京市精品课程相配套,设计了基于虚拟仪器的气动伺服系统实验平台,针对本科生、研究生开设了一系列实验选修课程。
1 虚拟仪器简介
虚拟仪器技术是由美国国家仪器公司(National Instruments,NI)在1986年提出的一种构成仪器系统的新概念,其基本思想是:用计算机资源取代传统仪器中的输入、处理和输出等部分,实现仪器硬件核心部分的模块化和最小化,用计算机软件和仪器软面板实现仪器的测量和控制功能[7]。虚拟仪器通过应用软件将计算机与仪器硬件结合起来,将传统仪器的功能模块化和软件化,以达到自动测试分析的目的。用户可以通过图形化界面,轻松地完成仪器的启动、运行和结束,以及对被测试对象的数据采集、分析、显示、故障诊断、数据存储、网络通信以及控制输出等功能[8]。
2 气动伺服系统实验平台的硬件设计
2.1 实验平台结构设计
气动伺服系统实验平台主要由气动回路和数据采集与控制回路两部分组成,系统结构图和实物图分别如图1和图2所示,主要元件的型号见表1。气动回路主要由气源、电磁阀、比例阀、压力传感器、气缸等组成;数据采集与控制回路以PC机和数据采集卡为核心,由位移传感器、力传感器、加速度传感器和相应的信号调理电路等组成。


图2 气动伺服系统实验平台的实物图

表1 气动伺服系统实验平台的主要元件组成

表1 (续)
PC机采用DELL的OptiPlex 780。数据采集卡采用美国NI公司的PCI6229多功能数据采集卡。PCI6229具有模拟输入、模拟输出、数字I/O、计数器I/O等功能。模拟输入通道有单端输入32路、差分输入16路,分辨率为16位,最大采样率为250kS/s。模拟输出通道有4路,数据更新率为每通道625kS/s。数字I/O有48路,有2个定时/计数器,分辨率为32位,内部时钟频率为80MHz。该板卡的模拟输入、模拟输出电压的最大范围均为±10V[9]。
2.2 信号调理电路设计
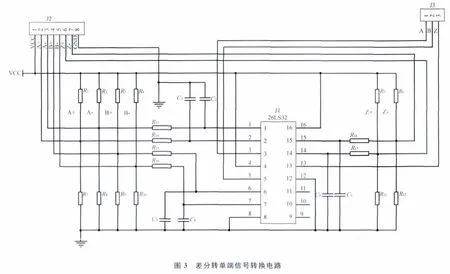
雷尼绍光栅尺的输出信号为差分信号,而PCI6229计数器的输入端只能接收单端信号,因此需要设计信号调理电路将光栅尺的输出差分信号A+、A-、B+、B-、Z+、Z-转换为PCI6229计数器可以 接收的单端信号A、B、Z,所设计的电路如图3所示。
3 气动伺服系统实验平台的软件设计
3.1 软件开发平台
本系统软件开发平台是运行在Windows XP操作系统下的图形化编程软件LabVIEW。LabVIEW是美国NI公司推出的一种图形化软件开发集成环境,使用“所见即所得”的可视化技术建立人机界面,使用大多数工程师所熟悉的数据流程图式的语言编写程序,是目前常用的虚拟仪器开发平台[10]。
NI公司开发了两套NI-DAQ(data acquisition,数据采集)驱动程序:Traditional NI-DAQ 和 NIDAQmx。PCI6229数据采集卡是基于计算机PCI总线技术,属于M系列卡,只支持NI-DAQmx的数据采集方法。与Traditional NI-DAQ相比,NI-DAQmx有许多突出的新特性,比如:能更轻松地添加DAQ应用程序编程接口(API)的新特性和新设备,更有效的多线程数据采集,提高了数据采集性能,提高了驱动性能和可靠性,更便利的使用方式等[11]。如图4所示,DAQ Assistant是一个图形化的界面,用于交互式地创建、编辑和运行 NI-DAQmx虚拟通道和任务[12]。一个NI-DAQmx任务是虚拟通道、定时和触发信息,以及其他与采集或生成相关属性的组合。
3.2 系统软件功能框图
系统软件的编写采用模块化的编程思想,系统软件功能框图见图5。

图5 气动伺服系统实验台软件功能框图
(1)数据采集子模块。包括气缸输出力、气缸运动加速度、气缸左右两腔的压力值4路模拟输入信号和气缸位置1路计数器输入信号。
(2)参考信号生成子模块。用于产生任意的给定参考信号。
(3)信号输出子模块。包括用于控制2个电气比例阀的2路模拟输出信号和用于控制2个电磁阀的2路数字输出信号。
(4)信号处理子模块。通过采样得到的数值,结合给定参考信号,通过一定的控制算法,得到所需要的控制量的值。
(5)图形化操作与显示子模块。利用LabVIEW丰富的界面实现人机交互功能,主要包括:测量数据的显示,给定参考信号参数的设定,控制算法中参数的设定等。
(6)数据存储子模块。实现将测量的数据保存为文件。
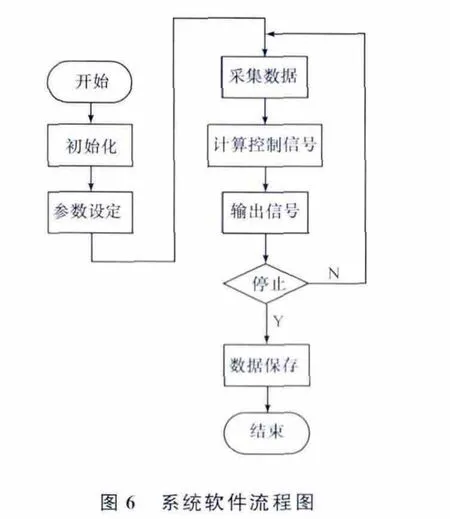
3.3 系统软件流程图
系统软件流程图如图6所示。
4 气动伺服系统实验平台的功能介绍
4.1 基础性实验
本实验主要面向大学三年级的学生开设选修实验课,也可作为本科毕业生的毕业设计课题。主要的基础实验如下:
(1)气动位置伺服系统PID控制器的设计;
(2)气动位置伺服系统模糊控制器的设计;
(3)气动力伺服系统PID控制器的设计;
(4)气动力伺服系统模糊控制器的设计。
主要是让学生在熟悉气动伺服系统工作原理的基础上,利用LabVIEW软件中提供的PID工具包和模糊逻辑工具包进行控制器的设计,使学生对气动伺服系统的设计有一定的理解和掌握。
4.2 综合研究性实验
本实验主要面对硕士研究生、博士研究生开设的“控制科学实践”选修实验课,也可作为研究生的研究课题进行深入研究。主要的综合研究实验如下:
(1)气动伺服系统数学模型的研究;
(2)气动伺服系统运动控制的研究;
(3)气动力/位置复合伺服系统的研究。
主要是让研究生在熟悉气动伺服系统工作原理的基础上,利用该实验平台进行气动伺服系统复杂控制理论与先进控制算法的实验研究,使学生对气动伺服系统的设计和实现有较深入的理解和掌握。
5 结束语
气动伺服系统实验平台采用模块化结构,针对性强,具有可扩展性和开放性,可以完成基础教学、应用和科研等多个方面的研究。该实验平台有助于学生全面了解气动伺服系统的工作原理及其应用技术,不仅增加了学生的实验操作技能,使学生对所学习的基本理论、基本技能得到综合训练和提高,而且有利于学生拓展视野,学习新技术、新手段,提高学生的学习兴趣,为学生今后的学习和工作打下坚实的基础。
(References)
[1]SMC(中国)有限公司.现代实用气动技术[M].3版.北京:机械工业出版社,2008.
[2]吴振顺.气压传动与控制[M].哈尔滨:哈尔滨工业大学出版社,1995.
[3]王永昌,潘先耀.气动伺服控制系统及阀的应用形式[J].燕山大学学报,2002,26(3):206-208.
[4]彭太江,杨志刚,阚君武,等.电-气比例/伺服技术现状及其发展[J].农业机械学报,2005,36(6):126-130.
[5]王雪松,程玉虎,易建强.电-气位置伺服控制系统的研究进展[J].控制与决策,2007,22(6):601-607.
[6]彭熙伟,陈金兵,范伟,等.《流体传动与控制基础》精品课程的建设与实践[J].液压与气动,2012(5):108-110.
[7]李江全.虚拟仪器设计测控应用典型实例[M].北京:电子工业出版社,2010.
[8]王立强,卢琴芬,叶云岳,等.基于虚拟仪器的三相直线感应电机静态测试系统[C]//Proceedings of the 26thChinese Control Conference,Zhangjiajie,Hunan,China,2007:281-285.
[9]林朝阳,叶晓慧,姚祖文.基于PCI-6229的数据采集方法[J].舰船电子工程,2007(6):148-150.
[10]基于LabVIEW的气动比例伺服系统模型辨识研究[J].实验技术与管理,2009,26(6):76-79.
[11]刘胜,张兰勇,章佳荣,等.LabVIEW 2009程序设计[M].北京:电子工业出版社,2010.
[12]三维书屋工作室,胡仁喜,高海宾.LabVIEW 2010中文版虚拟仪器从入门到精通[M].北京:机械工业出版社,2012.
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年6期)2021-07-20
测控技术(2018年12期)2018-11-25
测控技术(2018年9期)2018-11-25
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
电源技术(2016年9期)2016-02-27
北京航空航天大学学报(2016年4期)2016-02-27
