
基于红外视频的车载行人车辆检测系统
2013-09-04 02:04王忠耀任青春王少华郭春生
杭州电子科技大学学报(自然科学版) 2013年5期
王忠耀,任青春,王少华,郭春生
(杭州电子科技大学通信工程学院,浙江杭州310018)
0 引言
行人车辆的检测系统在智能驾驶、智能交通与智能监控等领域具有很高的应用价值。对于摄像头运动的前景图像提取,常用的方法有光流法和混合高斯模型,光流法计算复杂性大,不利于实时处理,而混合高斯模型有效性高、易于实现[1]。在处理视频与图像识别的问题中,神经网络具有的信息分布式存储、大规模自适应并行处理、高度容错性等优点,表现得更为突出[2,3]。结合混合高斯模型和神经网络算法,本文提出了一种基于红外视频的车载行人车辆检测系统。仿真结果表明本检测系统算法运算量低,虚警率低,可靠性强,对于辅助驾驶有着广泛的适用性。
1 基于红外视频的车载行人车辆检测系统设计
1.1 总体流程设计
基于红外视频的车载行人车辆检测系统算法流程图如图1所示:
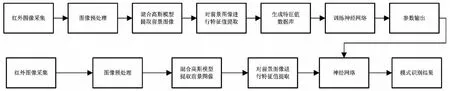
图1 基于红外视频的行人车辆检测系统算法流程图
图1中,先对采集的红外视频图像进行预处理划定梯形区域,再利用混合高斯算法提取梯形区域前景,对提取的前景进行特征值分析并生成特征值数据库,最后利用特征值数据库训练神经网络。系统测试时利用神经网络进行模式识别判断车辆前方是否存在障碍物。
1.2 梯形感兴趣区域的前景提取
为了提高系统的精确度和减少算法的复杂度,利用混合高斯模型,只对车前方一定距离的梯形区域内的路面状况进行背景建模。在减小了计算量的同时,排除了路两旁的高楼、路灯等干扰,提高了系统的精确度。
对于感兴趣区域中的象素在时刻t的亮度值gt,用K个高斯模型表示其出现的概率为:

为了减少算法的复杂度提高运算速度性,采用一种高效的权重更新方法,若象素均值处于1个高斯模型的2.5倍标准方差之内,则进行权重更新,否则丢弃权重最小的高斯模型并以均值为gt的新高斯函数替换。其中,权重更新方程为:

式中,α是学习常数。对权重归一化,再更新高斯模型的参数:


1.3 前景目标的特征值提取
红外视频中行人车辆检测系统的主要指标是系统检测的精确度和算法的运算量,为了减少处理时间,对前景内的目标提取特征值,利用其特征值完成对行人与车的检测,为了兼顾系统检测的精确度提取目标物体的几何形状、灰度分布、运动速度、边缘梯度分布4类特征进行检测。
(1)几何形状。目标物体的横向宽度与纵向高度的比值,对于人来说,身高远大于横向宽度,而车的高度与宽度差别不大,一般情况下人的横向宽度与纵向宽度的比值小于车;
(2)灰度分布。目标物体红外图像的灰度值分布,在红外条件下,人的头部最亮,车的四个轮子最亮,即人的上半部分的灰度值较大,车的下半部分的灰度值较大;
(3)运动速度。道路上人的速度一般小于车的速度,通过对相邻两帧目标物体对应的边缘灰度值作相减运算,用大量相邻的边缘点的差值来统计估计目标的运动速度,为提高估计的精度,提取目标最高、最低、最左、最右4个方位点的速度用平均值作为目标的速度;
(4)边缘梯度分布。对于人造的立体型的车,随着运动状态的不同,其边缘梯度分布的差异较大,与车相比人的形体特征的边缘梯度的分布较稳定。提取目标物体边缘梯度在0°、45°、90°、135°,4个方向上梯度的统计值[4],用来区分出人和车。
1.4 行人车辆的检测判别
利用BP神经网络实现行人与车辆的检测判别,首先从选择的训练样本图像中提取4类共10个特征值进行网络训练,得到关于图像目标的特征向量,对未知的目标进行检测时,通过特征向量确定该图像目标中是否存在车或者行人。对于BP神经网络的训练,采取3层,10个输入节点,5个隐含层节点,2个输出节点的BP神经网络结构,隐含层激励函数为:

输出节点k为:

从大量图像中提取的4类共10个特征值进行神经网络训练后,利用训练得到的数据,对从待测图像中提取的特征值进行处理判别,若神经网络判别输出的结果(人、车或无目标)与待测图像的实际情况相符合,说明此次判别正确,否则,判别错误,仿真得到的神经网络的判别正确率如图2所示。
从图2中可看出当训练样本数为500个时,系统对目标的正确判别率在90%上下波动,满足系统的预期要求。
2 仿真结果及分析
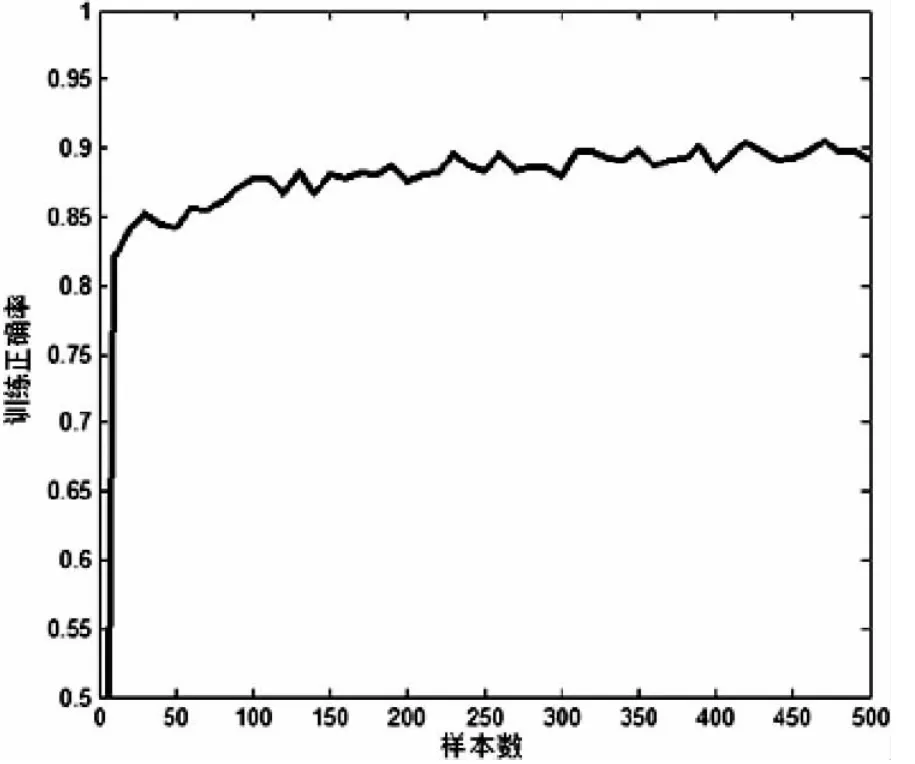
图2 神经网络判别的正确率
根据图1所示的系统算法流程,利用MATLAB对系统进行仿真,结果如图3、4所示:
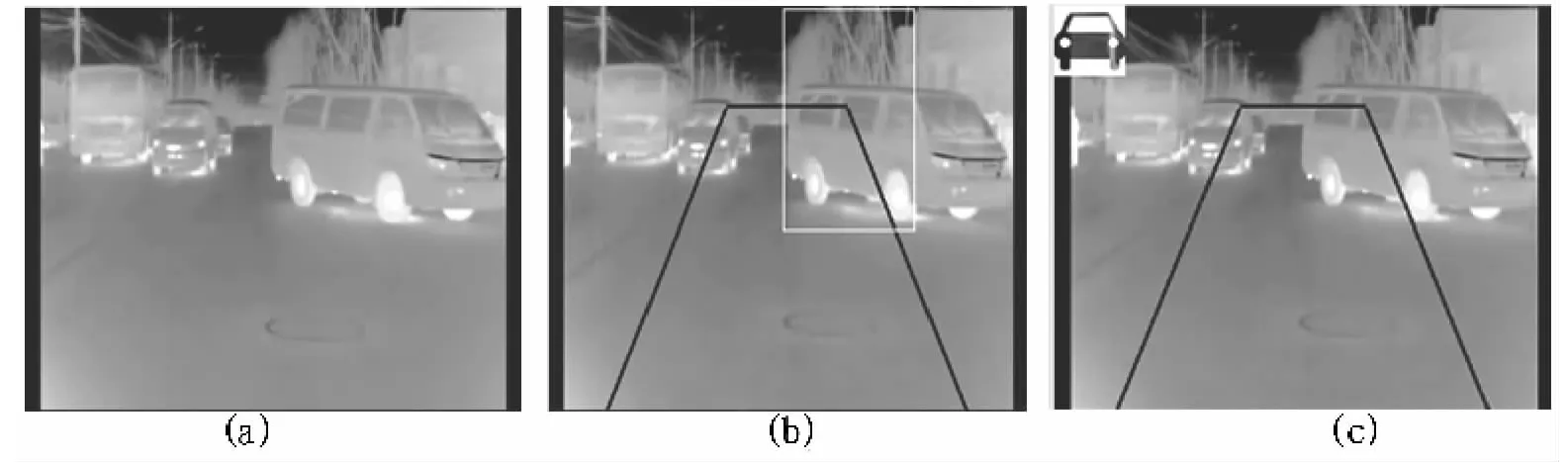
图3 感兴趣区域内有车出现时的仿真结果
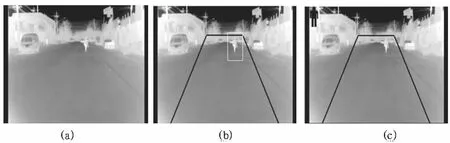
图4 感兴趣区域内有人出现时的仿真结果
依照图1所示的系统算法流程,对图3、4的解释说明如下:
图3(a)、图4(a)分别对应于当处理区域有车、有行人2种不同道路情况下的原红外图像,它们经过梯形区域划定处理后再利用混合高斯模型提取前景并利用前景对目标进行框定,结果分别如图3(b)、图4(b)所示,对于框定的目标进行特征值提取,并把特征值输入到训练好的神经网络,经可视化处理后的结果如图3(c)、图4(c)所示,其中用车的图形表示观测点的前方有车存在,用人的图形表示观测点前方有人存在,若观测点前方无可疑物体用“?”图形表示。
为了检测系统的可靠性,仿真处理了700张图片,其判别结果的统计如表1所示:

表1 系统仿真结果统计图
经过MATLAB仿真检测,采取只对感兴趣的梯形区域进行处理的系统处理速度,比对整张图片进行处理的速度快,有效地减少了算法的运算量,同时检测精度为91.3%,达到了系统模型的预期要求。
3 结束语
本文仿真实现了一个基于夜间红外视频的行人车辆检测系统,通过图像感兴趣区域的设定,混合高斯模型对前景的提取,利用精心选取的特征值输入到神经网络,在简化图像处理的运算量、提高检测速度的同时,很好地检测和判别出视频中出现的行人与车辆,最终达到夜间驾驶时预警的效果。仿真结果显示基于红外视频的车载行人车辆检测系统的算法运行速度快,虚警率较低,可靠性较强,对于辅助驾驶有着广泛的适用性。
[1]Milan Sonka,Vaclav Hlavac,Roger Boyle.艾海舟,苏延超,译.图像处理、分析与机器视觉(第三版)[M].北京:清华大学出版社,2011:537-562.
[2]雷建锋,孙俊逸.基于人工神经网络下的图像识别的研究[J].现代电子技术,2008,31(8):127-130.
[3]袁曾任.人工神经元网络及其应用[M].北京:清华大学出版社,l999:66-131.
[4]曾春,李晓华,周激流.基于感兴趣区梯度方向直方图的行人检测[J].计算机工程,2009,35(24):182-184.
[5]MATLAB中文论坛.MATLAB神经网络30个案例分析[M].北京:北京航天航空大学出版社,2010:1-36.
猜你喜欢
数学物理学报(2021年5期)2021-11-19
意林(2021年5期)2021-04-18
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
扬子江(2019年1期)2019-03-08
数学物理学报(2018年3期)2018-07-17
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
东北电力大学学报(2015年1期)2015-11-13
